实验报告

一实验目的
1.学会用拉伸法测量杨氏模量;
2.掌握光杠杆法测量微小伸长量的原理;
3学会用逐差法处理实验数据;
4.学会不确定度的计算方法,结果的正确表达。
二仪器及用具
杨氏弹性模量测量仪(包括望远镜、测量架、光杠杆、标尺、砝码)、钢卷尺、游标卡尺、螺旋测微器
三实验原理:
在外力作用下,固体所发生的形状变化称为形变。它可分为弹性形变和塑性形变两种。本实验中,只研究金属丝弹性形变,为此,应当控制外力的大小,以保证外力去掉后,物体能恢复原状。
最简单的形变是金属丝受到外力后的伸长和缩短。金属丝长L,截面积为S,沿长度方向施力F后,物体的伸长L?,则在金属丝的弹性限度内,有:
我们把Y称为杨氏弹性模量。
四实验步骤:
<一> 仪器调整
1、杨氏弹性模量测定仪底座调节水平; 2、平面镜镜面放置与测定仪平面垂直;
3、将望远镜放置在平面镜正前方1.500-2.000m左右位置上;
4、粗调望远镜:将镜面中心、标尺零点、望远镜调节等高,望远镜的缺口、准星对准平面镜中心,并能在望远镜外看到尺子的像;
5、调节物镜焦距能看到尺子清晰的像,调节目镜焦距能清晰的看到叉丝;
6、调节叉丝在标尺0刻度cm2?以内,并使得视差不超过半格。
<二>测量
1、 下无挂物时标尺的读数0A;
2、依次挂上kg1的砝码,七次,计下;
3、依次取下kg1的砝码,七次,计下
4、用米尺测量出金属丝的长度L(两卡口之间的金属丝)、镜面到尺子的距离D;
5、用游标卡尺测量出光杠杆x、用螺旋测微器测量出金属丝直径d。
<三>数据处理方法——逐差法
1. 实验测量时,多次测量的算术平均值最接近于真值。但是简单的求一下平均还
是不能达到最好的效果,我们多采用逐差法来处理这些数据。
2. 逐差法采用隔项逐差:
五、数据记录:(根据实验要求设计实验记录表格)
六、数据处理及误差计算:(按实验要求计算、作图得出实验结果,计算误差,最后正确表示出实验结果。)
七、实验结果分析与问题讨论:
1.误差主要取决于金属丝的微小变化量和金属丝的直径,由于平台上的圆柱形卡头上下伸缩存在系统误差,用望远镜 读取微小变化量时存在随机误差。
2.实验测数据时,由于砝码的摇晃使得金属丝没有绝对静止,读数时存在随机误差。 3.测量金属丝直径时,由于存在椭圆形,故测出的直径存在系统误差和随机误差。 4.测量D时米尺没有拉水平,测量L时米尺没有铅垂导致误差存在。 5.测量X时,由于作垂线没有完全的垂直,导致X值的测量存在误差。
第二篇:拉伸法测弹性模量 实验报告
大连理工大学

大学物理实验报告
院(系) 材料学院 专业 材料物理 班级 0705
姓 名 童凌炜 学号 200767025 实验台号
实验时间 2008 年 11 月 11 日,第12周,星期 二 第 5-6 节
实验名称 拉伸法测弹性模量
教师评语
实验目的与要求:
1. 用拉伸法测定金属丝的弹性模量。
2. 掌握光杠杆镜尺法测定长度微小变化的原理和方法。
3. 学会处理实验数据的最小二乘法。
主要仪器设备:
弹性模量拉伸仪(包括钢丝和平面镜、直尺和望远镜所组成的光杠杆装置), 米尺, 螺旋测微器
实验原理和内容:
1. 弹性模量
一粗细均匀的金属丝, 长度为l, 截面积为S, 一端固定后竖直悬挂, 下端挂以质量为m的砝码; 则金属丝在外力F=mg的作用下伸长Δl。 单位截面积上所受的作用力F/S称为应力, 单位长度的伸长量 Δl/l称为应变。
有胡克定律成立:在物体的弹性形变范围内,应力F/S和Δl/l应变成正比, 即

其中的比例系数

称为该材料的弹性模量。
性质: 弹性模量E与外力F、物体的长度l以及截面积S无关, 只决定于金属丝的材料。
实验中测定E, 只需测得F、S、l和 即可, 前三者可以用常用方法测得, 而的数量级很小, 故使用光杠杆镜尺法来进行较精确的测量。
即可, 前三者可以用常用方法测得, 而的数量级很小, 故使用光杠杆镜尺法来进行较精确的测量。
2. 光杠杆原理
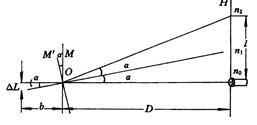 光杠杆的工作原理如下: 初始状态下, 平面镜为竖直状态, 此时标尺读数为n0。 当金属丝被拉长以后, 带动平面镜旋转一角度α, 到图中所示M’位置; 此时读得标尺读数为n1, 得到刻度变化为
光杠杆的工作原理如下: 初始状态下, 平面镜为竖直状态, 此时标尺读数为n0。 当金属丝被拉长以后, 带动平面镜旋转一角度α, 到图中所示M’位置; 此时读得标尺读数为n1, 得到刻度变化为 。 Δn与呈正比关系, 且根据小量忽略及图中的相似几何关系, 可以得到
。 Δn与呈正比关系, 且根据小量忽略及图中的相似几何关系, 可以得到
 (b称为光杠杆常数)
(b称为光杠杆常数)
将以上关系, 和金属丝截面积计算公式代入弹性模量的计算公式, 可以得到

(式中B既可以用米尺测量, 也可以用望远镜的视距丝和标尺间接测量; 后者的原理见附录。)
根据上式转换, 当金属丝受力Fi时, 对应标尺读数为ni, 则有
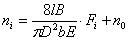
可见F和n成线性关系, 测量多组数据后, 线性回归得到其斜率, 即可计算出弹性模量E。
P.S. 用望远镜和标尺测量间距B:
已知量: 分划板视距丝间距p, 望远镜焦距f、转轴常数δ
用望远镜的一对视距丝读出标尺上的两个读数N1、N2, 读数差为ΔN。 在几何关系上忽略数量级差别大的量后, 可以得到
 , 又在仪器关系上, 有x=2B, 则
, 又在仪器关系上, 有x=2B, 则 , (
, ( )。
)。
由上可以得到平面镜到标尺的距离B。
步骤与操作方法:
1. 组装、调整实验仪器
调整平面镜的安放位置和俯仰角度以确保其能够正常工作。 调整望远镜的未知, 使其光轴与平面镜的中心法线同高且使望远镜上方的照门、准星及平面镜位于同一直线上。
调节标尺, 使其处于竖直位置。
通过望远镜的照门和准星直接观察平面镜, 其中是否课件标尺的像来确定望远镜与平面镜的准直关系, 以保证实验能够顺利进行。
调节望远镜, 使其能够看清十字叉丝和平面镜中所反射的标尺的像, 同时注意消除视差。
2. 测量
打开弹性模量拉伸仪, 在金属丝上加载拉力(通过显示屏读数)
当拉力达到10.00kg时, 记下望远镜中标尺的刻度值n1, 然后以每次1.00kg增加拉力并记录数据, 直到25.00kg止。
用钢尺单次测量钢丝上下夹头之间的距离得到钢丝长度l。
用卡尺测量或者直接获得光杠杆常数b。
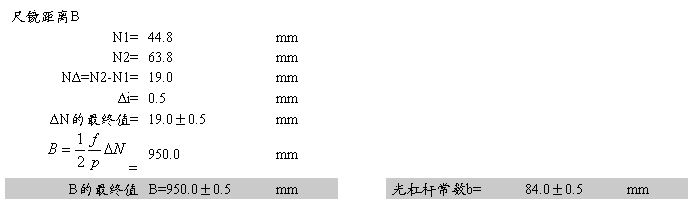
用望远镜的测距丝和标尺值, 结合公式计算出尺镜距离B。
用螺旋测微器在不同位置测量钢丝直径8次(注意螺旋测微器的零点修正)
数据记录与处理:
以下是实验中测得的原始数据:
1. 钢丝的长度 L=401.2 mm
2. 钢丝的直径

(其中螺旋测微器的零点漂移值 Δ=-0.01mm 已包含)
3. 由望远镜测得的差丝读数 N1=44.8mm N2=63.8mm
4. 光杠杆常数(实验室给出)b=(84.0±0.5)mm
5. 钢丝加载拉力 及对应的标尺刻度
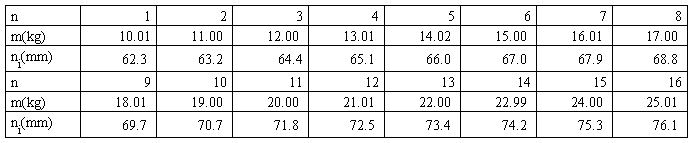
未加载拉力时, 标尺读数为 n0=53.4mm
结果与分析:
钢丝长度测量值的不确定度为 Δi=0.5mm, 钢丝长度为 l=401.2±0.5mm


将加载拉力数据和相应的标尺读数转化为 F以N为单位, ni以m为单位, 得到如下

对上表数据进行 处理, 使用MLS
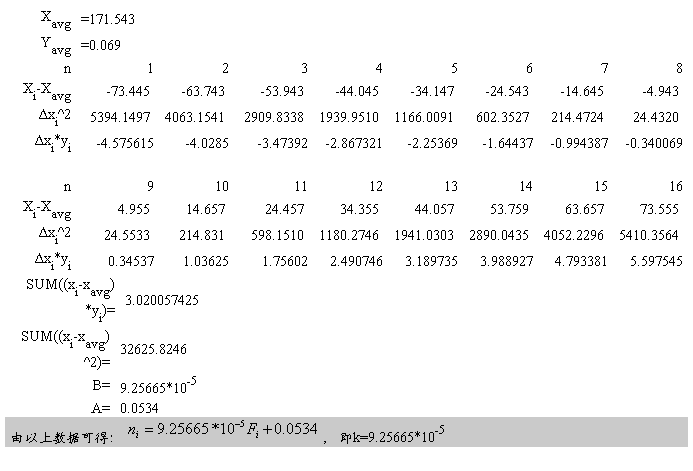
F与ni的关系图及其二乘法线性回归如下图所示:

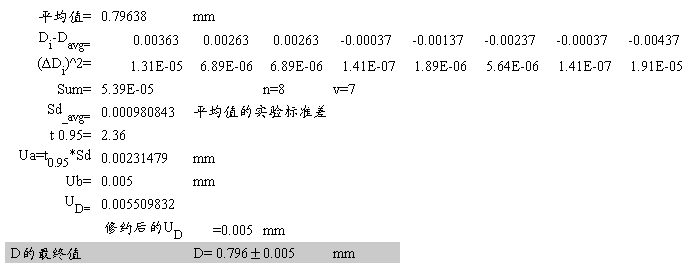
结合以上有关数据, 可以得到

下面计算E的相关不确定度:
相关量的值及其不确定度如下:

又已知
代入相关已知数据, 可以得到UE=2751552554.69, 修约后为UE=3*109
得到E的最终结果为 E= (1.97±0.03)*1011Pa
讨论、建议与质疑:
1. 光杠杆的测量原理为以下两个性质的组合: 绝对光路可逆原理, 几何上的相似三角形性质。 它利用光传播的直线性、可逆性, 使人眼通过望远镜观测到的标尺读数(长度)与钢丝的型变量, 在几何上通过相似三角形的关系联系起来, 另外通过平面镜的反射性质, 又再次将型变量在之前的基础上放大至两倍, 综上起到放大微小变化量的结果。 放大倍数与光杠杆常数b, 尺镜距离B有关(可以认为与这两者比例B/b成正比关系)。 当系统给定的光杠杆常数b固定时, 在可读数的范围内增加尺镜距离B, 可以增大放大倍率从而提高尺镜法测量微小变化量的灵敏度。
2. 在实验中测量一个物理量,需要综合考虑测量的方便程度和该物理量所需的精密程度。 在平衡这两者的基础上选择合适的实验仪器, 因此在实验中, 不同的物理量是用不同的测量仪器来测量的。 实验中测量误差最大的值为钢丝的长度, 因为钢尺量程不够, 是用两把钢尺重叠的方法测量, 在读数时会造成钢尺位移; 另外该物理量仅测量一次, 都会造成产生较大的误差。 改进建议是是用较大量程的钢尺进行测量。
3. 本实验的操作过程并不复杂, 但是将微观尺度的化学键作用同宏观的金属丝形变联系起来, 体现了物理学上用宏观体现微观性质的一种思想; 另外实验中所是用的光杠杆尺镜测量法也提供了一种微小变量的较精确测量方法, 值得学习和借鉴。 实验中的感受是, 事先预习实验内容, 操作时细心、 稳当, 都是保证实验快速成功的条件。
4. 对本实验的改进是, 在加载力控制盒上加自动卸载的装置, 比如在内部注射器的活塞杆上套弹簧, 当弹簧限位被解除时, 便可以自动将拉力卸载(类似于千斤顶的卸载开关), 这样能够方便地将拉力卸载到较小的符合值, 而不用手动拉活塞杆。