物理实验研究性报告
课题名称:拉伸法测量钢丝的弹性模量
作者:王俊夫(11131227)
刘宇光(11131231)
目录
摘要... 3
实验原理... 3
实验仪器... 4
实验步骤... 5
数据记录和处理... 6
实验讨论... 8
误差分析... 8
改进方法... 9
创新方案... 10
方案1:利用劈尖干涉测量微小位移... 10
方案2:利用迈克尔逊干涉仪测量微小位移... 11
总结与反思... 11
参考文献... 12
摘要
弹性模量是描述材料形变与应力关系的重要特征量, 是工程技术中常用的一个参数。在实验室施加的外力使材料产生的变形相当微小, 难以用肉眼观察,同时过大的载荷又会使得 材料发生塑形变形, 所以要通过将微小变形放大的方法来测量。 本实验通过光杠杆将外力产生的微小位移放大,从而测量出杨氏弹性模量,具有较高的可操作性。
关键词:杨氏模量,光杠杆法,变形放大
实验原理
(1)杨氏弹性模量定义式
任何固体在外力作用下都要发生形变,最简单的形变就是物体受外力拉伸(或压缩)时发生的伸长(或缩短)形变。设金属丝的长度为 L,截面积为 S,一端固定,一端在伸长方向上受力为F,伸长为△L。
定义:
物体的相对伸长 为应力
为应力
物体单位面积上的作用力 为应变
为应变
根据胡克定律,在物体的弹性限度内,物体的应力与应变成正比,即

则有:
E=
式中的比例系数 E 称为杨氏弹性模量(简称弹性模量)。
实验证明:弹性模量 E 与外力 F、物体长度 L 以及截面积的大小均无关,而只取决定于 物体的材料本身的性质。它是表征固体性质的一个物理量。
对于直径为 D 的圆柱形钢丝,其弹性模量为:
E=
根据上式,测出等号右边各量,杨氏模量便可求得。式中的 F、D、L 三个量都可用一般方法测得。唯有 ?L 是一个微小的变化量,用一般量具难以测准。故而本实验采用光杠杆法进行间接测量。
(2)光杆杆法放大原理

光杠杆测量系统由光杠杆反射镜、倾角调节架、标尺、望远镜和调节反射镜组成。实验时,将光杠杆两个前足尖放在弹性模量测定仪的固定平台上,后足尖放在待测金属丝的测量 端面上。当金属丝受力后,产生微小伸长,后足尖便随着测量端面一起作微小移动,并使得光杠杆绕前足尖转动一个微小角度,从而带动光杠杆反射镜转动相应的微小角度,这样标尺的像在光杠杆反射镜和调节反射镜之间反射,便把这一微小角位移放大成较大的线位移。
如图所示,当钢丝的长度发生变化时,光杠杆镜面的竖直度必然要发生改变。那么改变后的镜面和改变前的镜面必然有一个角度差,用 θ 来表示这个角度差。
从图中我们可以看出:?L = b ? tan θ ≈ b θ ,式中b为光杠杆前后足距离,称为光杠杆常数。
设开始时在望远镜中读到的标尺读数为 ,偏转后读到的标尺读数为
,偏转后读到的标尺读数为 ,则放大后的钢丝伸长量为C=
,则放大后的钢丝伸长量为C= ,由图中几何关系有:
,由图中几何关系有:
2θ ≈ ,
,
由上式得到: 
带入计算式,即可得下式:
E=
实验仪器
弹性模量测定仪(包括:细钢丝、光杠杆、望远镜、标尺及拉力测量装置);钢卷尺、游标卡尺和螺旋测微计。
实验步骤
(1)调整测量系统
1.目测调整
首先调整望远镜,使其与光杠杆等高,然后左右平移望远镜与调节平面镜,直到凭目测从望远镜上方观察到光杠杆反射镜中出现调节平面镜的像,再适当转动调节平面镜直到出现标尺的像。
2.调焦找尺
首先调节望远镜目镜旋轮,使“十”字叉丝清晰成像;然后调节望远镜物镜焦距,直到标尺像和“十”字叉丝无视差。
3.细调光路水平
观察望远镜水平叉丝所对应的标尺读数和光杠杆在标尺上的实际位置是否一致,若明显不同,则说明入射光线与反射光线未沿水平面传播,可以适当调节平面镜的俯仰,直到望远镜读出的数恰好为其实际位置为止。调节过程中还应该兼顾标尺像上下清晰度一致,若清晰度不同,则可以适当调节望远镜俯仰螺钉。
(2)测量数据
1.首先预加 10kg 的拉力,将钢丝拉直,然后逐次改变钢丝拉力(逐次增加 2kg),测量望远镜水平叉丝对应的读数。
由于物体受力后和撤销外力后不是马上能恢复原状,而会产生弹性滞后效应,所以为了减小该效应带来的误差,应该在增加拉力和减小拉力过程中各测一次对应拉力下标尺读书,然后取两次结果的平均值。
2.根据量程及相对不确定度大小,用钢卷尺测量 L 和 H,千分尺测量 D,游标卡尺测量 b。考虑到钢丝直径因为钢丝截面不均匀而产生误差,应该在钢丝的不同位置测量多组 D 在取平均值。
(3)数据处理
由于在测量 C 时采取了等间距测量,适合用逐差法处理,故采用逐差法对视伸长 C 求平均值,并估算不确定度。其中 L、H、b 只测量一次,由于实验条件的限制,其不确定度不能简单地由量具仪器规定的误差限决定,而应该根据实际情况估算仪器误差限。
①测量钢丝长度 L 时,由于钢丝上下端装有紧固夹头,米尺很难测准,故误差限应该取 0.3 cm;
②测量镜尺间距 H 时,难以保证米尺水平,不弯曲和两端对准,若该距离为 1.0~1.5m,则误差限应该取 0.5cm;
③用卡尺测量光杠杆前后足距 b 时,不能完全保证是垂直距离,该误差限可定为 0.02cm。
数据记录和处理
五、实验数据记录
(1)钢丝直径D(由上而下取5处测量)

 =
= =
= mm=0.7946mm
mm=0.7946mm
(2)标尺读数

(3)其他数据
钢丝长度L=39.45cm,平面镜到标尺的距离H=108.41cm,光杠杆前后足间的距离b=(8.50 0.02)cm
0.02)cm
六、数据处理
用逐差法处理数据



不确定度计算
u(H)=
u(b)= (b)=
(b)=
D的不确定度
 (D)=
(D)=
∴u(D)= =0.00289mm
=0.00289mm
C的不确定度
∴u(C)=
E的不确定度

∴ =
=


=0.023
∴ =0.04Pa
=0.04Pa
∴E的最终表述为E=(1.89±0.04)× Pa
Pa
实验讨论
误差分析
通过查阅相关资料可得,钢的理论弹性模量约为 ,不妨取
,不妨取 作为真值的估计值,并以此计算绝对误差与相对误差:
作为真值的估计值,并以此计算绝对误差与相对误差:
绝对误差: (1.89-1.87)
(1.89-1.87)
相对误差:
可以看出,实验误差是比较小的。
下面估算各测量量不确定度对最终结果的不确定度的贡献:
各测量量的相对不确定度分量

由以上数据可以看出, ,
, ,
, 的对不确定度的贡献很大,这些不确定度主要来自于测量仪器的误差,因此可以通过改进测量方法进一步提高结果的精确度。
的对不确定度的贡献很大,这些不确定度主要来自于测量仪器的误差,因此可以通过改进测量方法进一步提高结果的精确度。
改进方法
由上分析,本实验仍存在一些误差,综合考虑造成误差的原因,我们提出如下改进措施:
1.测量钢丝长度L的改进
在测量钢丝长度 L 时,由于钢丝上下端装有紧固夹头,同时钢丝处于竖直拉长状态,这给测量带来很大不便。一来由于紧固夹头的阻碍,很难将钢卷尺贴近钢丝,而必须将钢卷尺放置在距离钢丝有一定距离的位置进行测量,这样由于人眼读数的视差, 必然会减低读数准确度;二来由于钢丝处于竖直拉长状态,测量者要将钢卷尺竖直拉长后再去读数,这样就很难保证视线与刻度对齐,从而产生视差,降低读数精度。针对这个问题,可以考虑将钢卷尺和固定钢丝的装置的一端固连在一起,并使得钢卷尺尽量靠近细钢丝。需要读数的时候,将钢卷尺拉出,由于钢卷尺的一端固定,这将大大降低了单人操作时的难度,可以提高测量精度。
2. 测量镜尺间距 H 的改进
在测量镜尺间距 H 时,由于距离较远,很难保证钢卷尺水平放置、不弯曲而且两端对齐,显然这样带来的误差将会相当大。为了减少该误差,可以参考光学实验中测量光学元件间距时采用带刻度的光具座的方法,将望远镜、钢丝固定装置置于一个带有刻度的导轨上,从而简化测量和提高精度。
3. 测量光杠杆前后足间距 b 的改进
在测量光杠杆前后足间距 b 时,不能保证完全是垂直距离,同时由于光杠杆的尺寸和形状问题,也会使得游标卡尺不能很好地卡紧前后足。可以考虑将光杠杆置于白纸上,用铅笔描出光杠杆三足位置,然后连接两个后足,再过前足作后足的垂线, 测量前足到垂足的距离, 则可以比较简便地测出前后足间距。 但是这样操作则不能用游标卡尺测量前后足间距,故而将会损失一定测量精度。
4. 测量视伸长 C 的改进
由于采用了光杠杆多次成像的方法放大了微小位移,故而对原来位移的微小扰动,也会同时放大成相当大的干扰,从而影响读取视伸长数值的精确度。在实验中我们发现,望远镜中的标尺像总是在晃动,很难保证叉丝保持对齐某个刻度线, 严重的时候叉丝对准的刻度甚至会有一个相当大的变动范围,大大超过仪器本身的测量误差限度。考虑到视伸长 C 对本实验精确度的影响极大,我认为应该着重改善这个问题。方法如下:
①应该尽可能地减少钢丝受到的扰动。实验时应该尽量小心,保持桌面的平稳,并且尽量在标尺像晃动不太剧烈的时候迅速读数。
②应该通过多次读取数值来消减误差。在加力和减力后,应该在标尺晃动不太剧烈时,读取几组数据,然后再求平均,通过平均的作用消减读取位置偏离真实位置的误差。
③应该在条件允许下改善实验设备。由于标尺像在不断晃动,要在它晃动的时候看清对齐的刻度并估读数字是很困难的,所以如果条件允许, 可以将望远镜改进为带有摄像功能的摄像望远镜。在标尺像晃动不太剧烈时,拍摄几组照片,之后再读取静止的照片中的读数,此时就能获得更好的精确度。
创新方案
受到光杠杆放大微小位移的原理启发,我们联想到很多微小位移都可以通过光学规律来间接求出。联系基础物理学中学到的光的干涉知识,结合其他物理实验内容,可以设计另外的方案来测量微小位移,从而达到测量弹性模量的目的。
方案1:利用劈尖干涉测量微小位移
如图,两块薄玻璃板叠放在一起并在 A 端固连,可绕 A端张开某一角度。在 B端将钢丝与下面的玻璃板连接,当对钢丝施加拉力 F 时,两玻璃张开一个微小角度 θ ,其中的空气薄膜组成劈尖,平行光垂直照射下来后将产生劈尖干涉,根据劈尖干涉规律,观察到的相邻明(暗)条纹间距为:
其中λ为入射光波长,n 为空气折射率
从而得到:
测出 AB 间距 H,则钢丝伸长 ?L = Htanθ ≈ Hθ,从而有 .
.
测出钢丝直径 D,钢丝原长 L 和施加的拉力 F,则有:
E=

方案2:利用迈克尔逊干涉仪测量微小位移
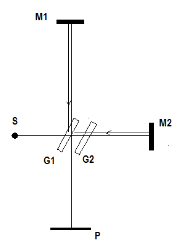 如图为迈克尔逊干涉仪,将钢丝固连到平面镜 M1 上,则当拉力 F 使得长为 L,半径为 D 的钢丝产生形变 ?L 时,将带动 M1 向下平移相同位移,此时观察视场中将会看到干涉条纹相对某参考线移过N 条,根据等厚干涉规律,有:
如图为迈克尔逊干涉仪,将钢丝固连到平面镜 M1 上,则当拉力 F 使得长为 L,半径为 D 的钢丝产生形变 ?L 时,将带动 M1 向下平移相同位移,此时观察视场中将会看到干涉条纹相对某参考线移过N 条,根据等厚干涉规律,有:
因此,E=
当然以上两个方案仍处于猜想阶段,没有得到实践证明,也许在实际操作时会遇到一些难度。但是这可以为我们提供测量微小位移的思路,也就是把通过精密的光学实验间接测量出难以直接测量的微小位移,从而进一步提高实验精度。
总结与反思
本实验通过光杠杆的放大作用,测出了在载荷作用下钢丝的微小变形, 从而测量出了钢丝的杨氏弹性模量。与文献上的理论值相比较,测量值能较好地吻合理论真值。光杠杆的放大作用同时也启发我们,放大微小位移时可以通过光学仪器或者光学规律将微小位移转化成或放大成可测量的较大位移。由此我们可以将这个思想推广到任何微小位移的测量上去,故而本实验具有重大的启发意义。实验中我们通过仔细琢磨原理和小心操作仪器,顺利地解决了一些故障和意外,但是仍然存在测量精度不足的问题,故而仍需要再接再厉。
作为一个研究性实验,我们还提出了几种创新性的方法,虽然囿于实验条件没有进行实际操作,但是在探索这些新方法时同样拓宽了我们的思路,获得了超过实验本身更多的知识。
参考文献:
[1]李朝荣.基础物理实验[M]. 北京. 北京航空航天大学出社, 2010; 80-88
[2]鲍宇,罗致.静态拉伸法测量金属弹性模量实验结果的偏差分析[R].湖南长沙;《物理与工程》.2005