静态拉伸法测弹性模量实验报告
弹性模量(亦称杨氏模量)是固体材料的一个重要物理参数,它标志着材料对于拉伸或压缩形变的抵抗能力。作为测定金属材料弹性模量的一个传统方法,静态拉伸法在一起合理配置、误差分析和长度的放大测量等方面有着普遍意义,但这种方法拉伸试验荷载大,加载速度慢,存在弛豫过程,对于脆性材料和不同温度条件下的测量难以实现。
1 实验原理及仪器
胡克定律指出,对于有拉伸压缩形变的弹性形体,在弹性范围内,应力 与应变
与应变 成正比,即
成正比,即

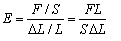
式中比例系数E称为材料的弹性模量,它是描写材料自身弹性的物理量.改写上式则有、
 (1)
(1)
可见,只要测量外力F、材料(本实验用金属丝)的长度L和截面积S,以及金属丝的长度变化量 ,就可以计算出弹性模量E。其中,F、S和L都是比较容易测得的,唯有很小,用一般的量具不易准确测量。本实验采用光杠杆镜尺组进行长度微小变化量的测量,这是一种非接触式的长度放大测量的方法。
,就可以计算出弹性模量E。其中,F、S和L都是比较容易测得的,唯有很小,用一般的量具不易准确测量。本实验采用光杠杆镜尺组进行长度微小变化量的测量,这是一种非接触式的长度放大测量的方法。
本实验采用的主要实验仪器有:
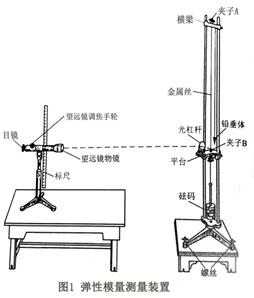
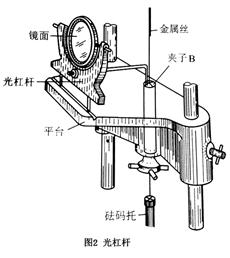
弹性模量仪(如图1)、光杠杆镜尺组(如图2)、螺旋测微器、米尺、砝码等。
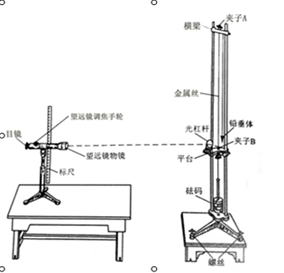
图1 弹性模量测量装置
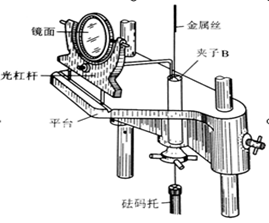
图2 光杠杆
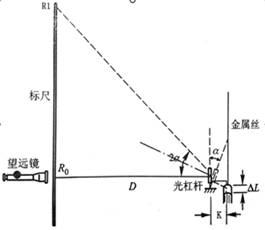
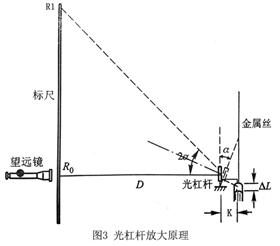
图3 光杠杆放大原理
仪器调节好后,金属丝未伸长前,在望远镜中可看到由平面镜反射的标尺的像,将望远镜的细叉丝对准标尺的刻度,读出读数为R0;将砝码加在砝码托上后,金属丝被拉长,光杠杆镜面向后倾斜了α角.根据光的反射定律可知,此时在望远镜中细叉丝对准的是镜面反射后的标尺上的刻度R1,其对应的入射光和反射光的夹角为2α。
设N=R1-R2,K为光杠杆的前后足之间的垂直距离,D为光杠杆镜面到标尺之间的距离,考虑到 ,
, 角很小,所以有
角很小,所以有
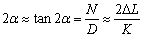
可得
 (2)
(2)
将式(2)代入式(1)即得拉伸法测定金属丝弹性模量的计算公式
 (3)
(3)
式中d为金属丝的直径.
2 实验步骤
2.1 调整弹性模量仪
① 调节三脚底座上的调节螺丝,使立柱铅直。
② 将光杠杆放在平台上,两前足放在平台前面的横槽内,后足放在夹子B上,注意后足不要与金属丝相碰。
③ 加2 kg砝码在砝码托上,把金属丝拉直。检查夹子B是否能在平台的孔中上下自由地滑动,金属丝是否被上下夹子夹紧。
2.2 调节光杠杆镜尺组
① 望远镜镜尺组放在离光杠杆镜面约1.5 m处,安放时尽量使望远镜和光杠杆的高度相当,望远镜光轴水平,标尺和望远镜光轴垂直。
② 调节望远镜时先从望远镜的外侧沿镜筒方向观察,看镜筒轴线的延长线是否通过光杠杆的镜面,以及镜面内是否有标尺的像。若无,则可移动望远镜的三脚架并略微转动望远镜,保持镜筒的轴线对准光杠杆的镜面,直到镜筒上方能看到光杠杆镜内有标尺的像为止。
③ 调节望远镜的目镜,使镜筒内十字叉丝清晰,再调节望远镜的调焦手轮,使标尺在望远镜中成像清晰无视差。
④ 仔细调节光杠杆小镜的倾角以及标尺的高度,使尺像的零线(在标尺的中间)尽可能落在望远镜十字叉丝的横线上。
2.3 测量
① 轻轻依次将1 kg的砝码加到砝码托上,共9次。记录每次从望远镜中测得的标尺像的读数Ri。
② 将所加的9 kg砝码轻轻地依次取下,记录每减少1 kg砝码时的Ri。
注意加减砝码时勿使砝码托摆动,各砝码缺口交叉放置,以防倒落。
2.4 处理数据实验数据
① 将测量中采集到的数据R0、R1……R9分成前后两组,用逐差法处理数据,可得增减5kg砝码时,望远镜中标尺像读数的变化量的平均值。
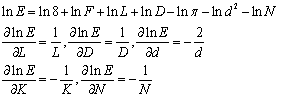
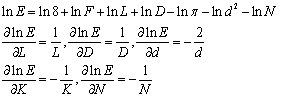
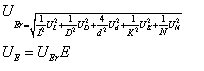
② 弹性模量E相对误差的计算

3 实验数据及测量结果
3.1 各单次测量量
g=9.794m/s2
D±UD=84.5±0.5cm
L±UL=32.3±0.2cm
K±UK=45.5±0.5mm
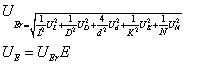
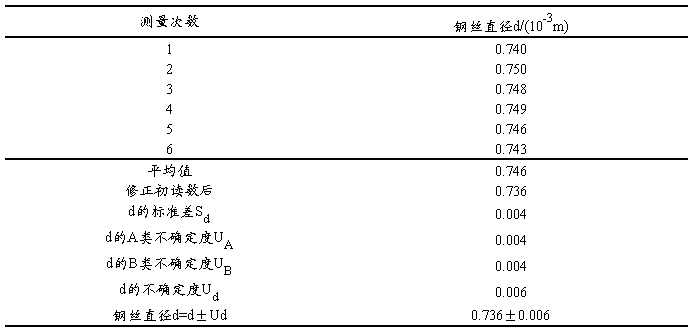
3.2 金属丝直径d的测量
螺旋测微器的初始读数= -0.056mm
螺旋测微器的仪器误差
表1金属丝直径d
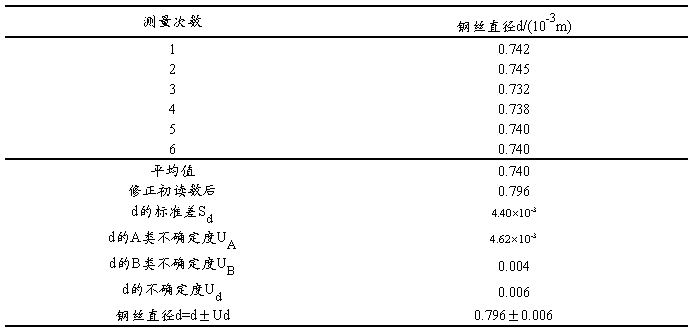
3.3 望远镜中标尺像Ri的数据处理
表2望远镜中标尺像的数据处理

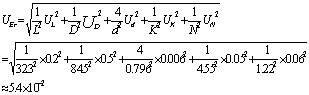
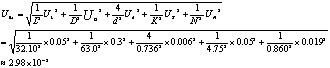
3.4 弹性模量E及其不确定度的计算
由于是新仪器,公式改为:

代入以上测量数据,得:


不确定度的计算:


第二篇:静态拉伸法测弹性模量的误差分析
静态拉伸法测弹性模量的误差分析
摘 要: 本文讨论了在静态拉伸法测弹性模量实验中造成实验结果误差的可能因素以及减小误差的方法,提出了改进方法,以获得更加精确的结果。
关键词: 弹性模量;静态拉伸法;误差分析;改进方法
Analysis on the Result Error of Measuring Elastic Modulus by Static Stretching Method
Fan Jingjie
(Department of Information Science and Engineering, Southeast University, Nanjing 210096)
key words: This article mainly discusses the factors which may influence measurement results in the experiment and raises some improvements in order to obtain a more accurate measurement result.
key words: Elastic modulus; Static stretching method; Error study; Improvement
弹性模量(亦称杨氏模量)是固体材料的一个重要物理参数,它标志着材料对于拉伸或压缩形变的抵抗能力。静态拉伸法是测定金属材料弹性模量的一个传统方法,在仪器合理配置、误差分析和长度的放大测量等方面有着普遍意义。但这种方法拉伸试验荷载大,加载速度慢,存在弛豫过程,对于脆性材料和不同温度条件下的测量难以实现。
1 实验原理及仪器
胡克定律指出,对于有拉伸压缩形变的弹性形
体,在弹性范围内,应力 与应变
与应变 成正比,即
成正比,即

式中比例系数E称为材料的弹性模量,它是描写材料自身弹性的物理量.改写上式则有、
 (1)
(1)
可见,只要测量外力F、材料(本实验用金属丝)的长度L和截面积S,以及金属丝的长度变化量 ,就可以计算出弹性模量E。其中,F、S和L都是比较容易测得的,唯有很小,用一般的量具不易准确测量。本实验采用光杠杆镜尺组进行长度微小变化量的测量,这是一种非接触式的长度放大测量的方法。
,就可以计算出弹性模量E。其中,F、S和L都是比较容易测得的,唯有很小,用一般的量具不易准确测量。本实验采用光杠杆镜尺组进行长度微小变化量的测量,这是一种非接触式的长度放大测量的方法。
本实验采用的主要实验仪器有:
弹性模量仪(如图1)、光杠杆镜尺组(如图2)、螺旋测微器、米尺、砝码等。
仪器调节好后,金属丝未伸长前,在望远镜中可看到由平面镜反射的标尺的像,将望远镜的细叉丝对准标尺的刻度,读出读数为R0;将砝码加在砝码托上后,金属丝被拉长,光杠杆镜面向后倾斜了α角.根据光的反射定律可知,此时在望远镜中细叉丝对准的是镜面反射后的标尺上的刻度R1,其对应的入射光和反射光的夹角为2α。
设N=R1-R2,K为光杠杆的前后足之间的垂直距离,D为光杠杆镜面到标尺之间的距离,考虑到 ,
, 角很小,所以有
角很小,所以有
可得
 (2)
(2)
将式(2)代入式(1)即得拉伸法测定金属丝弹性模量的计算公式
 (3)
(3)
式中d为金属丝的直径.
2 实验步骤
2.1 调整弹性模量仪
① 调节三脚底座上的调节螺丝,使立柱铅直。
② 将光杠杆放在平台上,两前足放在平台前面的横槽内,后足放在夹子B上,注意后足不要与金属丝相碰。
③ 加2 kg砝码在砝码托上,把金属丝拉直。检查夹子B是否能在平台的孔中上下自由地滑动,金属丝是否被上下夹子夹紧。
2.2 调节光杠杆镜尺组
① 望远镜镜尺组放在离光杠杆镜面约1.5 m处,安放时尽量使望远镜和光杠杆的高度相当,望远镜光轴水平,标尺和望远镜光轴垂直。
② 从望远镜的外侧沿镜筒方向观察,看镜筒轴线的延长线是否通过光杠杆的镜面,以及镜面内是否有标尺的像。若无,则可移动望远镜的三脚架并略微转动望远镜,保持镜筒的轴线对准光杠杆的镜面,直到镜筒上方能看到光杠杆镜内有标尺的像为止。
③ 调节望远镜的目镜,使镜筒内十字叉丝清晰,再调节望远镜的调焦手轮,使标尺在望远镜中成像清晰无视差。
2.3 测量
① 轻轻依次将1 kg的砝码加到砝码托上,共9次。记录每次从望远镜中测得的标尺像的读数Ri。
② 将所加的9 kg砝码轻轻地依次取下,记录每减少1 kg砝码时的Ri。
注意加减砝码时勿使砝码托摆动,各砝码缺口交叉放置,以防倒落。
2.4 处理数据实验数据
① 将测量中采集到的数据R0、R1……R9分成前后两组,用逐差法处理数据,可得增减5kg砝码时,望远镜中标尺像读数的变化量的平均值。
② 弹性模量E相对误差的计算

3 实验数据及测量结果
3.1 各单次测量量
g=9.794m/s2
D±UD=63.0±0.3cm
L±UL=32.10±0.05cm
K±UK=4.75±0.05cm
3.2 金属丝直径d的测量
螺旋测微器的初始读数= -0.01mm
螺旋测微器的仪器误差
表1金属丝直径d
3.3 望远镜中标尺像Ri的数据处理
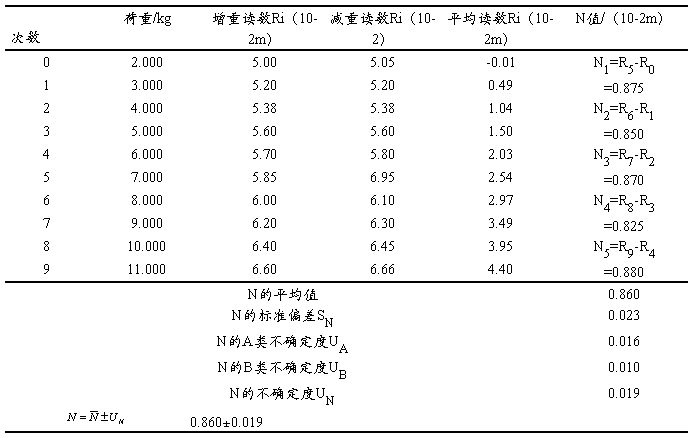
表2望远镜中标尺像的数据处理

3.4 弹性模量E及其不确定度的计算
由于是新仪器,公式改为:





4 造成实验结果误差的可能因素
4.1 金属丝存在弯曲
在托盘上放一两个砝码预拉伸金属丝,可能不足以完全消除金属丝的弯曲,余下的弯曲会在继续加载的过程中逐渐消除,在减小载荷的过程中又再次出现。
为尽量消除金属丝弯曲引起的偏差,可增加预拉伸的砝码个数。
4.2 下卡头与平台间的摩擦
杨氏弹性模量仪的下卡头与平台中圆孔内壁之间的间隙很小。 如果杨氏弹性模量仪立柱不竖直,下卡头受平台中圆孔限制,与上卡头的中心轴线不在同一竖直线上,上、下卡头之间的金属丝不竖直,下卡头与圆孔内壁接触发生摩擦。增加砝码时,下卡头运动方向向下,摩擦力向上,金属丝所受的实际拉力小于名义上的载荷;减砝码时,下卡头运动方向向上,摩擦力方向向下,金属丝所受的实际拉力大于名义上的载荷。导致了砝码数相同时,金属丝在减载时的长度大于加载时的长度,减载时的读数总是大于加载时的读数。
处理时,对加载和减载时的数据取平均,可以减小甚至消除摩擦因素对结果的影响,从而提高结果的准确度,但精密度不高。
4.3 仪器支架受力伸缩
两根支柱受力发生的形变会附加在金属丝的轴向形变中通过光杠杆体现出来.。加载时支柱变短,测得的形变比金属丝形变大。 加载越重,附加的形变越大。设支架弹性模量为2×1011 N ·m-2,长度取为0.7m,内外径分别为0.0212 m和0.0266 m,则在F=100N时,其形变=8.5×10-7m,远低于金属丝的总形变,故影响是极小的。
4.4 范性形变
实际上,100N 的力远不足以导致实验所用的金属丝产生范性形变,但加砝码时动作太猛,瞬时的冲力可能超过其弹性极限,造成金属丝的一个不可逆的伸长,产生“增重时形变大”的假象,如果出现此种情况则表明实验是不成功的。
在我们的实验中加砝码时动作必须平稳,以保证形变在弹性限度内。
4.5 镜尺倾斜
4.5.1 镜面倾斜α角引起的误差

由图4知
其中



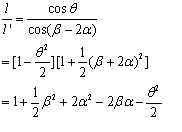

对于上式,有
如 ,则
,则

当 时
时
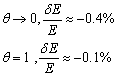
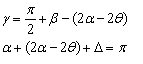
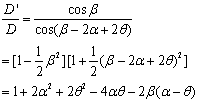
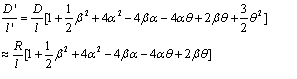
4.5.2 标尺倾斜β角引起的误差
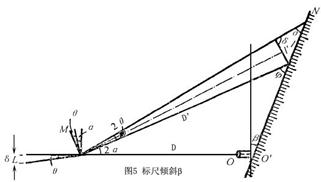
由图5知




当时
由4.5.1及4.5.2的分析结果可知,镜面倾斜引入的误差在1%以下,而标尺倾斜引入的误差已达6%,不可忽略.故实验中,需特别注意标尺应与望远镜光轴垂直,避免引入较大的误差。
4.6 桌面的形变
实验中调节望远镜使尺像落在目镜的十字叉丝时,调整好后再次观察,发现二者稍有偏离,可能是因为手支撑在桌面上,使桌面产生形变,使得尺像与方才调整的位置有偏离。而测量采集数据Ri时,手撑着桌面,桌面产生的微小形变使得标尺像的读数发生变化,测量结果偏离实际钢丝的伸长量。
因此实验操作中,应注意手不要撑着桌面,避免桌面的微小形变所带来的测量误差。
5 总结
通过上述实验及讨论可以看出,静态法测弹性模量实验并不精确,很容易产生误差。除了教材上提及的的可能误差外,还有以下几个方面可能造成较明显的误差:
1、 金属丝存在弯曲。解决措施:增加预拉伸的砝码个数。
2、 下卡头与平台间的摩擦。解决措施:对加载和减载时的数据取平均,可以减小甚至消除摩擦因素对结果的影响,从而提高结果的准确度。
3、 范性形变。解决措施:在我们的实验中加砝码时动作必须平稳,以保证形变在弹性限度内。
4、 镜尺倾斜。解决措施:实验中,需特别注意标尺应与望远镜光轴垂直,避免引入较大的误差。
5、 桌面的形变。解决措施:实验操作中,应注意手不要撑着桌面,避免桌面的微小形变所带来的测量误差。
参考文献:
[1] 钱峰,潘人培.大学物理实验(修订版)[M].北京:高等教育出版社,2005:77-82.
[2] 鲍宇,罗致.静态拉伸法测量金属丝杨氏弹性模量实验结果的偏差分析[R].湖南长沙:《物理与工程》.2005.