实验三 拉伸法测量金属丝的模量
一、实验目的
1.掌握用拉伸法测量金属丝弹性模量的原理和方法。
2.学习光杠杆测量微小长度变化的原理和方法。
二、实验原理
1.弹性模量
在外力作用下,固体所发生的形状变化称为形变。如果力较小时,一旦外力停止了作用,形变将随之消失,这种形变称为弹性形变。如果外力足够大,当停止作用时,形变不能完全消失,留下剩余的形变称之为塑性形变。当开始出现塑形形变时,表明材料达到了弹性限度。
针对连续,均匀,各向同性的材料做成的钢丝,设其长为L,横截面积为S。沿长度方向施力F后,钢丝绳伸长或缩短ΔL。单位长度的伸长量ΔL/L称为线应变,单位横截面积所受的力F/S称为正应力。根据胡克定律,在金属丝弹性限度内正应力和线应变呈正比关系。比例系数

 (1)
(1)
称为弹性模量,旧城杨氏模量,他表征材料本身的弹性性质。E越大的材料,要使他发生一定的相对形变所需的单位横截面积上的作用力就越大。实验表明,弹性模量E与外力F,物体的原长L和横截面积S的大小无关。仅与材料的性质有关。
为测定弹性模量E值,式中F,S,L都可以用普通仪器及一般方法测出。唯有ΔL是一个微小的变化量。很难用普通测长的仪器准确的量度。本实验将采用光杠杆方法进行准确的测量。
 2.光杠杆装置
2.光杠杆装置
初始时,平面镜处于垂直状态。标尺通过平面镜反射后,在望远镜中呈像。则望远镜可以通过平面镜观察到标尺的像。望远镜中十字线处在标尺上刻度为 。当钢丝下降DL时,平面镜将转动q角。则望远镜中标尺的像也发生移动,十字线降落在标尺的刻度为
。当钢丝下降DL时,平面镜将转动q角。则望远镜中标尺的像也发生移动,十字线降落在标尺的刻度为 处。由于平面镜转动q角,进入望远镜的光线旋转2q角。从图中看出望远镜中标尺刻度的变化
处。由于平面镜转动q角,进入望远镜的光线旋转2q角。从图中看出望远镜中标尺刻度的变化 。
。
因为q角很小,由上图几何关系得:


则:
 (2)
(2)
由(1)(2)得:
 (3)
(3)
三、实验器材
弹性模量测定仪(包括:拉伸仪、光杠杆、望远镜、标尺),水平仪,钢卷尺(5M),螺旋测微器(0.01mm),游标卡尺(ΔX=0.05),台灯,砝码(1Kg)若干
四、实验步骤
1.调弹性模量测定仪底角螺钉,使钢丝位于平台圆孔中间且能上下自由移动。使工作台水平。
2.放上光杠杆,T形架的两前足置于平台上的沟槽内。使镜面与金属丝平行,将望远镜置于光杠杆前1.5m~2.0m处。
3.使直尺和金属丝平行。调节望远镜光轴与反射镜中心等高。调节对象为望远镜筒。移动望远镜使标尺与望远镜几乎对称的分布在反射镜两侧。利用望远镜上的瞄准器,使望远镜对准反射镜,调节镜面使通过镜筒上方能从反射镜中看到标尺像。
4.调节望远镜找标尺的像:先调节望远镜目镜,得到清晰的十字叉丝;再调节调焦手轮,使标尺成像在十字叉丝平面上。以消除叉丝横线与直尺刻度间的视差。
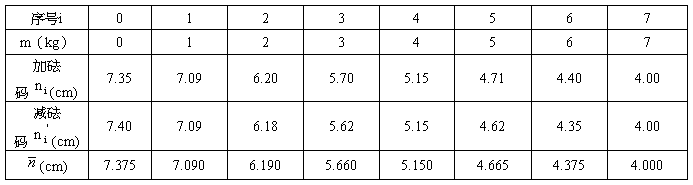
5.记录望远镜中标尺的初始读数 (不一定要零),再在钢丝下端挂1kg砝码,待系统稳定后,记录望远镜中标尺读数
(不一定要零),再在钢丝下端挂1kg砝码,待系统稳定后,记录望远镜中标尺读数 ,以后依次加1kg,并分别记录望远镜中标尺读数,直到6块砝码加完为止.这是增量过程中的读数
,以后依次加1kg,并分别记录望远镜中标尺读数,直到6块砝码加完为止.这是增量过程中的读数 。然后再每次减少1kg砝码,并记下减重时望远镜中标尺的读数
。然后再每次减少1kg砝码,并记下减重时望远镜中标尺的读数 。(以消除弹性形变滞后效应的影响)取同一负荷刻度尺的度数平均值
。(以消除弹性形变滞后效应的影响)取同一负荷刻度尺的度数平均值

6.根据待测长度的特征,应综合运用多种测量长度的工具的方法,正确选择实验室提供的测量仪器。用卷尺测量平面镜与标尺之间的距离D,钢丝长度L,用游标卡尺测量光杠杆K值(把光杠杆在纸上按一下,留下三点的痕迹,连成一个等腰三角形。作其底边上的高,即可测出K)。用螺旋测微器测量钢丝直径d。
7.用逐差法处理数据。计算对应3Kg负荷时金属丝的伸长量
 (i=1,2,3,)
(i=1,2,3,)
及伸长量的平均值
将 ,L,D,K,d各量结果代入(3)式,计算出待测金属丝的弹性模量。
,L,D,K,d各量结果代入(3)式,计算出待测金属丝的弹性模量。
五、数据记录与处理
标尺最小分度:1mm 千分尺最小分度:0.01mm 钢卷尺最小分度:1mm
测得钢丝的直径
d=0.67mm
平面镜与标尺之间的距离
D=161.50cm
光杠杆臂长
k=7.036cm
钢丝长度
L=52.20cm
另外,实验测得的标尺读数如下:
表一 外力mg与标尺读数
表二  的逐差法处理
的逐差法处理

计算弹性模量:

 =
=

六、讨论分析
1.实验测数据时,由于砝码的摇晃使得金属丝没有绝对静止,读数时存在随机误差。
2.测量金属丝直径时,金属丝并不是严格的圆柱体,可能存在椭圆形,故测出的直径存在系统误差和随机误差。
3.测量D时米尺没有拉水平,测量L时米尺没有铅垂导致误差存在。用卷尺测量时由于时差导致结果偏差可能较大。
4.平台上的圆柱形卡头上下伸缩存在系统误差,金属丝端的方框形夹头与平台孔壁接触摩擦太大。
5.加砝码时,动作不够平稳,导致光杠杆足尖发生移动。对实验造成了很大影响。
6.根据Y的不确定度公式

可知 对Y的测量结果影响最大。
对Y的测量结果影响最大。
第二篇:静态拉伸法测量金属丝杨氏弹性模量实验结果的偏差分析


物理与工程 Vol.15 No.5 2005
大学生园地
静态拉伸法测量金属丝杨氏弹性模量
实验结果的偏差分析3
鲍 宇 罗 致
(湖南大学应用物理系,湖南长沙 410082)
(收稿日期:2005204227)
摘 要 减小相应误差的方法.,关键词 杨氏弹性模量;验结果有什么影响?本文对多种可能的影响因素
进行了分析.2 实验原理及方法
1 引言
杨氏弹性模量是描述材料抵抗弹性形变能力
的物理量,本实验用静态拉伸法测定一种金属丝的杨氏弹性模量.静态拉伸法通过测量对试样直接加力下的形变来测量试样的杨氏弹性模量,原理直观、设备简单,测量方法、仪器调整、数据处理等方面都具有代表性,是力学基础实验之一.光杠杆是一种利用光学放大方法测量微小位移的装置.其方法在近代精密仪器中常有应用.例如在原子力显微镜(AFM)的系统中,就是利用光杠杆的原理使用微小悬臂(cantilever)来感测针尖与样品之间的交互作用,这作用力会使悬臂摆动,再利用激光将光照射在悬臂的末端,当摆动形成时,会使反射光的位置改变而造成偏移量,此时激光检测器会记录此偏移量,并把此时的信号传给反馈系统,以利于系统做适当的调整,最后再将样品的表面特性以影像的方式呈现出来.
在实验中,通过砝码的增减来改变对试样施加的拉力.在增加和减去砝码的过程中,砝码数相同时对应的标尺读数往往是不一致的,在尽量消除和减小各方面的影响后,仍存在有规律的偏差.从原理上说,只要所加负载是一样的,测得的伸长值应当是一致的.为什么会出现这种偏差?对实
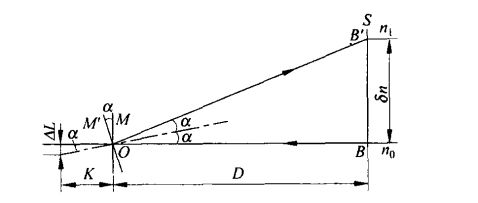
设一根粗细均匀的金属丝长为L,横截面积为S,受沿其轴向的拉力F作用伸长了ΔL(见图1).根据胡克定律,在弹性限度内弹性体的正应力(F/S)和线应变(ΔL/L)成正比,即
=E
S
L
图1 光杠杆放大原理示意图
比例系数E即被测金属丝的杨氏弹性模量.微小
的伸长量ΔL采用光杠杆系统测量.若所用光杠杆常数为K,镜尺距离为D,则光杠杆系统放大倍数为
K
.设δn为金属丝伸长前后在望远镜中看
到的两个标尺像读数之差,有
3湖南大学“迁移理论在物理实验教学中的实践”教改课题及20xx年SIT计划项目资助.作者为湖南大学2003级李达班学生.
E2mail:aihao66@
61

物理与工程 Vol.15 No.5 2005
ΔL=n
2D2
设金属丝直径为d,则S=,有
4
E=
根据以上数据,增重时金属丝的形变值要大于减重时的值.用增重时的数据算出的E值偏小,用减重时的数据算出的E值偏大.
下面对可能引起上述偏差的各种因素作一简要分析.
3.1 金属丝存在弯曲
πd2Kδn
这就是实验所依据的公式.从以上原理可知,δn测
量的精确性对实验结果的精确性的影响最大,实验的关键在于如何精确测量δn.δn的测量步骤为:在砝码托盘上放1~2个砝码(每个砝码质量为1.000kg)预拉伸金属丝,记下望远镜中水平线对应的标尺读数n′0,逐个增加砝码分别记下对应的标尺读数n′i(i=1,2,…,7),依次递减砝码分别记下对应的标尺读数n″i(i=7,6,,);ni=,,差法处理ni4.作用下δ的平均伸长n.3 实验结果及分析
在托盘上放一至两个砝码预拉伸金属丝,可能不足以完全消除金属丝的弯曲,余下的弯曲会在继续加载的过程中逐渐消除,在减小载荷的过程中又再次出现,.>δn51>δn62>nδn偏大,从而使E.
为尽量消除金属丝弯曲引起的偏差,将预拉伸的砝码数提高到了4个,得实验数据如表3和表4所列.
表3 增减砝码时记录相应的标尺读数(改进一)
i
对一根金属丝做测量得数据如表1和表2所列.
表1 增减砝码时记录相应的标尺读数(实验一)
i
下挂砝码质量/kg
4.0005.0006.0007.0008.0009.00010.00011.000
增重时
n′i/mm
减重时
n″i/mm
平均
ni/mm
n″′i-ni
/mm2.32.12.11.81.31.10.20
01234567
11.119.828.737.345.754.062.971.6
13.421.930.839.147.055.163.171.6
12.2520.8529.7538.246.3554.5563.071.6
下挂砝码质量/kg
1.0002.0003.0004.0005.0006.0007.0008.000
增重时
n′i/mm
减重时
n″i/mm
平均
ni/mm
n″′i-ni
/mm1.31.31.10.90.70.20.80
01234567
-59.2-49.2-40.1-31.1-22.6-14.0-5.73.0
-57.9-47.9-39.0-30.2-21.9-13.8-4.93.0
-58.55-48.55-39.55-30.75-22.25-13.9-5.33.0
表4 每增加4.000kg(=39.2N)拉力时
标尺读数之差(改进一)
增重时δn′减重时δn″
平均δn
34.133.733.2533.433.60.1880.56%
表2 每增加4.000kg(=39.2N)拉力时
标尺读数之差(实验一)
增重时δn′减重时δn″
δn40=n4-n0/mmδn51=n5-n1/mmδn62=n6-n2/mmδn73=n7-n3/mm
δn/mmδn/mmnδn/δ
36.635.234.433.334.880.691.98%
36.034.134.133.234.350.591.72%
δn40=n4-n0/mmδn51=n5-n1/mm
34.634.234.234.334.330.09470.27%
33.633.232.332.532.90.3030.92%
平均δn
36.334.6534.2533.2534.610.631.82%
δn62=n6-n2/mmδn73=n7-n3/mm
δn/mmδn/mmnδn/δ
与实验一相比,改进一的δn测量精度高一个数量级.
62

物理与工程 Vol.15 No.5 2005
3.2 下卡头与平台间的摩擦
杨氏弹性模量仪的下卡头与平台中圆孔内壁
之间的间隙很小.如果杨氏弹性模量仪立柱不竖直,下卡头受平台中圆孔限制,与上卡头的中心轴线不在同一竖直线上,上、下卡头之间的金属丝不竖直,下卡头与圆孔内壁接触发生摩擦.增加砝码时,下卡头运动方向向下,摩擦力向上,金属丝所受的实际拉力小于名义上的载荷;减砝码时,下卡头运动方向向上,摩擦力方向向下,金属丝所受的实际拉力大于名义上的载荷.导致了砝码数相同时,金属丝在减载时的长度大于加载时的长度,减载时的读数n″i总是大于加载时的读数n′i.数据处理时,对加载和减载时的数据取平均,,准确度,.
在测n″i,使读数减到n′′′i-2与ni-1之间(较接近ni-1),使摩擦力在减载过程中方向总是向上的,得到如表5和表6的实验数据.
表5 增减砝码时记录相应的标尺读数(改进二)
i
的相同砝码对应的读数相当接近,δn测量精度有
了较大的提高.但是由摩擦引起的系统误差仍然存在.
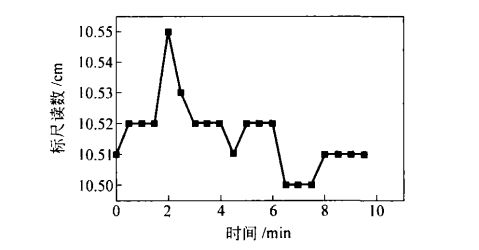
3.3 弹性滞后效应
有人提出,试样受力并不立即伸长到应有数值,反之,撤去后也不立即恢复原状,形变量需一段恢复时间.实际测量是在加(或减)砝码后待标尺像基本停止晃动就记录读数,这样测出的读数是否反映了金属丝的形变量?为此,观察一定载荷(砝码托上放六个砝码),2所示.,标,完全在仪器,.
下挂砝码质量/kg
1.0002.0003.0004.0005.0006.0007.0008.000
增重时
n′i/mm
减重时
n″i/mm
平均
ni/mm
n″′i-ni
/mm-0.30.20.50.30.20.20.10
01234567
-8.6-0.28.116.524.933.541.950.2
-8.9-0.08.616.825.133.742.050.2
-8.75-0.18.3516.6525.033.641.9550.2
图2 标尺读数随时间变化曲线
3.4 范性形变
表6 每增加4.000kg(=39.2N)拉力时
标尺读数之差(改进二)
增重时δn′减重时δn″
δn40=n4-n0/mmδn51=n5-n1/mm
δn62=n6-n2/mmδn73=n7-n3/mm
δn/mmn/mmnδn/δ
33.5033.7033.8033.7033.700.0650.19%
34.0033.7033.4033.4033.600.140.42%
实际上,100N的力远不足以导致实验所用的
金属丝产生范性形变,但加砝码时动作太猛,瞬时的冲力可能超过其弹性极限,造成金属丝的一个不可逆的伸长,产生“增重时形变大”的假象,使得δn很大并反映在应力2应变曲线呈现明显的非线性,如果出现此种情况则表明实验是不成功的.在我们的实验中加砝码时动作平稳,故保证了形变在弹性限度内.3.5 仪器支架受力伸缩两根支柱受力发生的形变会附加在金属丝的轴向形变中通过光杠杆体现出来.加载时支柱变短,测得的形变比金属丝形变大.加载越重,附加的形变越大.设支架杨氏弹性模量为2×1011N?m-2,长度取为0.7m,内、外径分别为010212m和0.0266m,则在F=100N时,其形变ΔL=≈8.5×10-7m,远低于金属丝的总形
S
E
平均δn
33.7533.7033.6033.5533.650.0790.23%
变(1mm左右),故影响是极小的.
这组数据与实验一的数据相比,加、减砝码时
63

物理与工程 Vol.15 No.5 2005
4 结语
的反应很灵敏,测量也很精确,在精密仪器中常有
应用,例如灵敏电流计,通过光杠杆的放大可测量10-8A~10-11A的电流.原子力显微镜(AFM)的主要组成部分之一位置检测部分即是一个极精细的光杠杆,当针尖与样品之间有了交互作用之后,会使得悬臂(cantilever)摆动,所以当激光照射在悬臂的末端时,其反射光的位置也会因为悬臂摆动而有所改变,这就造成偏移量的产生.在整个系统中是依靠激光光斑位置检测器将偏移量记录下并转换成电的信号,以供SPM控制器作信号处理.,在他的鼓励和热情,.同时也要感谢何仁生老师和赵英老师的悉心指导,感谢湖南大学物理实验中心的支持.
参考文献
[1] 赵凯华,罗蔚茵.新概念物理教程 力学[M].北京:高等教
以上分析了可能影响δn测量结果的五种因
素,金属丝可能存在的弯曲;在立柱不竖直时下卡头与平台间的摩擦;金属丝本身的弹性滞后效应;范性形变;仪器支架受力伸缩等对结果有一定的影响,弹性滞后效应对结果无影响.其中对加载和减载时的标尺读数不一致有影响的是下卡头与平台间的摩擦和范性形变等因素.为了提高实验的精确度应尽量消除金属丝本身的弯曲,在目测基本无弯曲情况下适当增加一至两个砝码;加、减砝码时要轻放轻拿,、减
,nn/δ分别为1.82%、0.56%、0.23%,这三组实验所得
的金属丝杨氏弹性模量的相对误差分别为3.1%、2.5%、2.4%,可见实验精密度有了较大提高.
建议:对本实验结果的精确度有较大影响的支架铅直度是通过观察底座中央的水平仪来调节三角形底座螺丝来实现的,认为底座水平的情况下,两根支架的加工精度即保证了金属丝的铅直.然而我们发现水平仪处于砝码盘的下方,很容易在实验中损坏.如果不改变水平仪的位置的话,可以在其上加一个防护罩,在实验调整时打开,调整完成后再盖上,这样水平仪在实验过程就不会被损坏了.平台中圆孔的直径也可以适当的增大,降低垂直度调整的难度,以减少下卡头与平台摩擦的可能性.
光杠杆法是一种利用光学放大方法测量微小长度(或物体微小位移)的装置.它采用光学机制以光线来代替机械杠杆的长臂而实现间接放大测量.光杠杆可以做得很轻,对微小伸长或微小转角
育出版社,1995
[2] 赵凯华,罗蔚茵.新概念物理教程 热学[M].北京:高等教
育出版社,1995
[3] 秦允豪.普通物理教程 热学[M].北京:高等教育出版社,
1999
[4] 徐芝纶.弹性力学(上)[M].北京:高等教育出版社,1978[5] 黄建刚,吴凤英,翦知渐,赵英.大学物理实验[M].长沙:湖
南大学出版社,2003
[6] 任隆良,谷晋骐.物理实验[M].天津:天津大学出版社,2003[7] 刘子臣.大学基础物理实验[M].天津:南开大学出版社,
2001
[8] 刘映栋.大学物理实验教程[M].南京:东南大学出版社,
1998
[9] 杜义林.大学实验物理教程[M].合肥:中国科学技术大学出
版社,2003
[10] 王荣.大学物理实验[M].长沙:国防科技大学出版社,2002[11] 赵万霖,咸小平.大学物理实验[M].广州:华南理工大学出
版社,1999
64