
目 录
一、设计题目……………………………………………………………3
二、设计目的和要求……………………………………………………3
1、设计目的………………………………………………………3
2、设计要求………………………………………………………3
三、设计总体思路………………………………………………………4
四、详细设计步骤………………………………………………………4
五、设计总结……………………………………………………………12
六、参考文献……………………………………………………………12
自动控制原理课程设计
一、设计题目:
设单位负反馈系统的开环传递函数为

用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:
(1) 相角裕度 ;
;
(2) 在单位斜坡输入下的稳态误差 ;
;
(3) 系统的剪切频率 。
。
题目要求:
(1) 分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正);
(2) 详细设计(包括的图形有:校正结构图,校正前系统的Bode图,校正装置的Bode图,校正后系统的Bode图);
(3) 用MATLAB编程代码及运行结果(包括图形、运算结果);
(4) 校正前后系统的单位阶跃响应图。
二、设计目的和要求
1、设计目的
(1)、通过课程设计进一步掌握自动控制原理课程的有关知识,加深对所学内容的理解,提高解决实际问题的能力。
(2)、理解在自动控制系统中对不同的系统选用不同的校正方式,以保证得到最佳的系统。
(3)、理解相角裕度,稳态误差,剪切频率等参数的含义。
(4)、学习MATLAB在自动控制中的应用,会利用MATLAB提供的函数求出所需要得到的实验结果。
(5)、从总体上把握对系统进行校正的思路,能够将理论运用于实际。
2、设计要求
(1)、能用MATLAB解复杂的自动控制理论题目。
(2)、能用MATLAB设计控制系统以满足具体的性能指标。
(3)、能灵活应用MATLAB分析系统的性能。
三、设计总体思路
(1)、根据稳态误差 的值,确定开环增益K。
的值,确定开环增益K。
(2)、利用已确定的开环增益K,确定校正前系统的传递函数,画出其bode图,从图上看出校正前系统的相位裕度 和剪切频率
和剪切频率 。
。
(3)、根据相位裕度的要求,计算出滞后校正装置的参数a和T。即得校正装置的传递函数,然后得到校正后系统的开环传递函数。
(4)、验证已校正系统的相位裕度和剪切频率。
四、详细设计步骤
1、由设计思路可知
(1)按要求的稳态误差系数,求出系统的开环放大系数K。
因为题目要求在单位斜坡输入下的稳态误差为ess <0.05
所以有 ess=lim 1/ [s·G0(s)]=1/k<0.05
k>20,
所以此次取定K=21。
(2)将k值代入原函数并令s=jw,得系统的开环频率特性为
G0(jw)=21/[jw(jw+1)]
(3)此次选择滞后校正对系统进行校正。
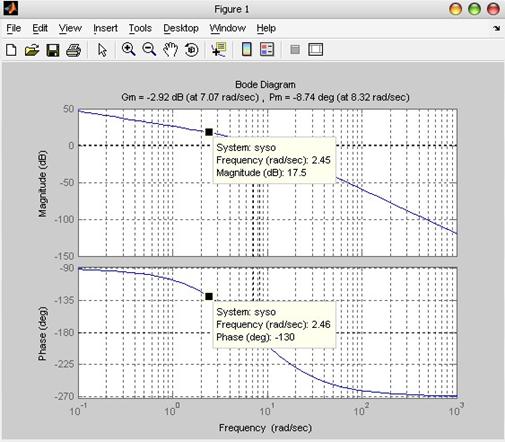
利用Matalab画出校正前系统的伯德图如图一:
源代码:no=[21];
do=[0.02 0.3 1 0];
syso=tf(no,do);
margin(syso);
grid
运行结果:相角裕量 Pm =﹣8.74 截止频率 Wcp = 8.32
(4)根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出b和T值并确定校正装置的传递函数。
(5)研究已校正系统的伯德图,检查全部性能指标是否满足要求。
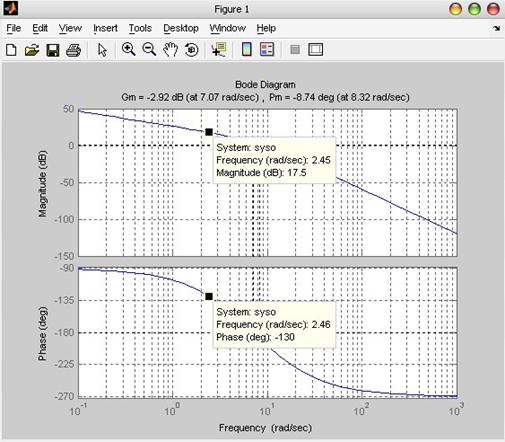
图一
2、详细设计
Ⅰ、校正前的系统分析
(1)单位阶跃响应分析
源代码: G=tf([21],[0.02 0.3 1 0 ]);
G1=feedback(G,1);
t=0:0.01:5;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正前单位阶跃响应’);
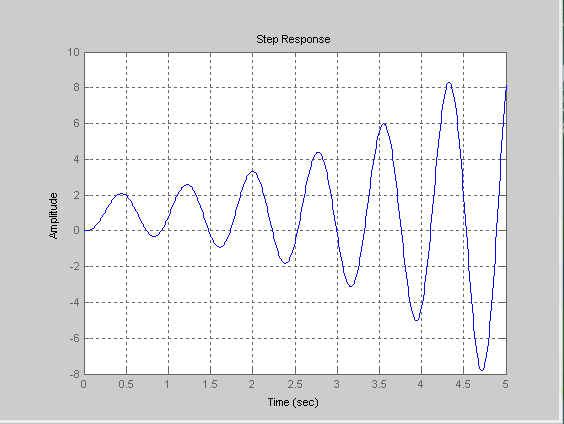
在Matlab中运行得到单位阶跃响应图如图二

图二 校正前单位阶跃响应
由图二可知,系统在单位阶跃输入下,开始时振荡比较大,超调量也比较大,系统的动态性能不佳。
(2)开环传递函数bode图分析
由图一可看出,相角裕量γ=17.50 截止频率wc=2.46rad/s。此时相角裕量不符合要求。
Ⅱ、系统校正过程
(1) 根据相角裕量γ≥450的要求,再考虑到串接滞后校正装置的相角滞后,从未校正系统的频率特性曲线图1上,找出对应相角-1800+(450+50)=-1300处的频率wc’≈2.46rad/s。wc’将作为校正后系统的增益交界频率。
(2) 确定滞后装置的传递函数 Gc=(1+aTs)/(1+Ts)
①根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出a值。
在wc=wc’处,从未校正的对数幅频特性曲线上求得 :
20lg|G0(jwc’)|=17.5dB···················①
再由20lg 1/a=17.5dB 计算出a=0.133
②由 1/(aT)=1/10·wc’所以当wc’≈2.46rad/s a=0.133时,可求得
T=30.56s
③将所求的a值和T值代入①式得校正装置的传递函数为:,
Gc(s)=(1+4.06448s)/(1+30.56s)
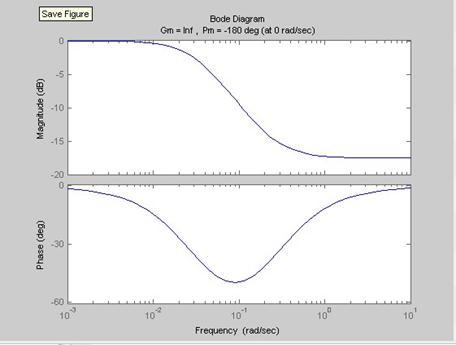
利用Matlab画出校正装置的Bode图 如图三
源代码:G0=tf([4.06448 1],[ 30.56 1]);
margin(G0);
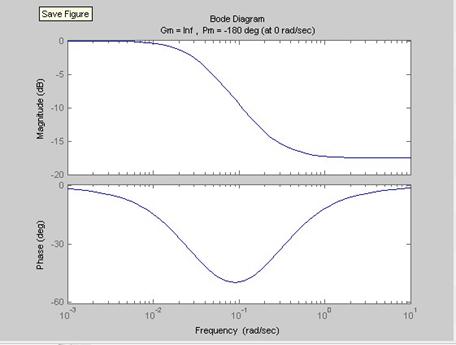
图三校正装置bode图
(3)已校正后系统的开环传递函数为
G(s)= G0(s)·Gc(s)
=21(1+4.06448s)/[s(0.1s+1)(0.2s+1)(1+30.56s)]
利用Matalab画出校后系统的伯德图如图四
源代码:
n1=21;
d1=[0.02 0.3 1 0]
s1=tf(n1,d1);
s2=tf([4.06448 1],[ 30.56 1]);
s=s1*s2;
[Gm,Pm,Wcm,Wcp]=margin(s)
margin(s)
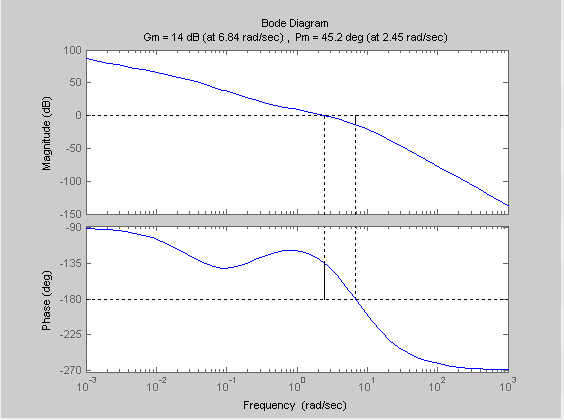
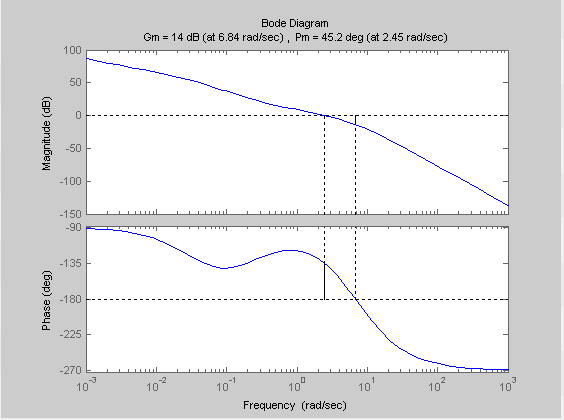
图四校正后bode图
运算结果:相角裕量Pm =45.2 截止频率 Wcp =2.45
Ⅲ、校正后验证
(1)校正后伯德图分析
由图三可知校正后的
相角裕量γ’=45.2>450
截止频率wc’’=2.45rad/s<3rad/s
符合设计题目的要求。
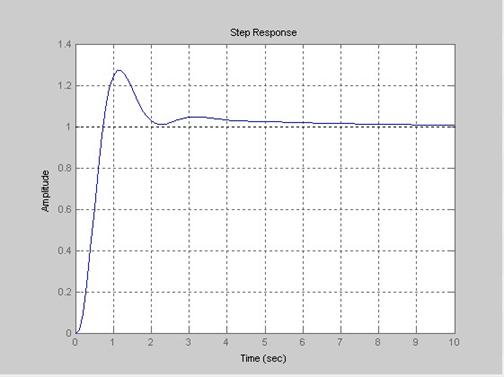
(2)校正后系统的单位阶跃响应图 图五
源代码:G=tf([85.35408 21 ],[0.6112 9.188 30.86 1 0]);
G1=feedback(G,1);
t=0:0.1:10;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正后单位阶跃响应’);
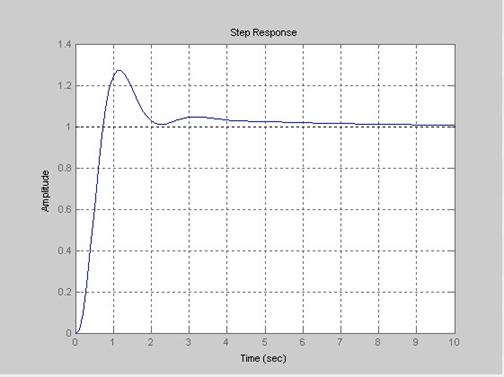
图五 校正后单位阶跃响应图
(3)将校正前后以及校正装置的伯德图放入同一个图中如图六
源代码:
G1=tf([21], [0.02 0.3 1 0]);
G2= tf([4.06448 1],[ 30.56 1]);
G3= tf([85.35408 21],[0.6112 9.188 30.86 1 0]);
[gm,pm,wg,wp]=margin(G1);
bode(G1,'r--',G2,'g',G3);
grid
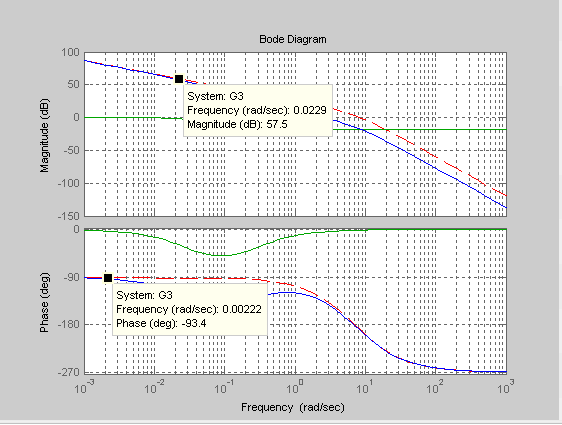
图六 校正前后和校正装置bode图
(校正前—红色 校正装置—绿色 校正后—蓝色)
由图六可看出,系统加入滞后校正装置后,在w>0.0229rad/s的频率范围内,滞后装置衰减了G(jw)的幅值,使系统的wc左移到wc’,使系统的快速性下降。
五、设计总结
本次设计是我是运用了滞后校正装置控制系统。在自动控制原理课程中校正系统有多种形式,特定的情况需要使用特定的校正装置,通过学习,我们应能够正确的将合适的校正装置应用于给定的系统,而本次课程设计三种方法都是可以的。
而本次设计中主要运用的是MATLAB,之前虽然接触过但是对它的运用不怎么熟悉,通过这次课程设计,使我对MATLAB的运用有了进一步的了解。
此次课程设计也进一步的培养了我们的动手能力,课堂学习主要注重于理论知识,而我们要将所学知识应用于实际,在此阶段,课程设计便是最好的选择了,通过课程设计,我们可以温习我们所学的理论知识,同时为将理论知识运用于实际搭建了一个很好的平台,不仅如此,通过这次的课程设计,使我知道了在当今的信息技术如此发达的世界中,我们必须运用多种渠道,去学习研究。并要很好的运用计算机和一些软件,只有这样,我们才能更好地、精确地、快速地解决问题。还有就是提高了自主解决问题的能力。
六、参考文献
[1] 杨庚辰.自动控制原理.西安电子科技大学出版社.1994.4
[2] 朱衡君.MATLAB语言及实践教程(第二版).清华大学出版社.2009.8
[3] 张静.MATLAB在控制系统中的应用.电子工业出版社.2007
第二篇:自动控制原理课程设计报告~单位负反馈系统设计校正
目 录
一、设计题目……………………………………………………………3
二、设计目的和要求……………………………………………………3
1、设计目的………………………………………………………3
2、设计要求………………………………………………………3
三、设计总体思路………………………………………………………4
四、详细设计步骤………………………………………………………4
五、设计总结……………………………………………………………12
六、参考文献……………………………………………………………12
一、设计题目:
设单位负反馈系统的开环传递函数为
用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:
(1) 相角裕度 ;
;
(2) 在单位斜坡输入下的稳态误差 ;
;
(3) 系统的剪切频率 。
。
题目要求:
(1) 分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正);
(2) 详细设计(包括的图形有:校正结构图,校正前系统的Bode图,校正装置的Bode图,校正后系统的Bode图);
(3) 用MATLAB编程代码及运行结果(包括图形、运算结果);
(4) 校正前后系统的单位阶跃响应图。
二、设计目的和要求
1、设计目的
(1)、通过课程设计进一步掌握自动控制原理课程的有关知识,加深对所学内容的理解,提高解决实际问题的能力。
(2)、理解在自动控制系统中对不同的系统选用不同的校正方式,以保证得到最佳的系统。
(3)、理解相角裕度,稳态误差,剪切频率等参数的含义。
(4)、学习MATLAB在自动控制中的应用,会利用MATLAB提供的函数求出所需要得到的实验结果。
(5)、从总体上把握对系统进行校正的思路,能够将理论运用于实际。
2、设计要求
(1)、能用MATLAB解复杂的自动控制理论题目。
(2)、能用MATLAB设计控制系统以满足具体的性能指标。
(3)、能灵活应用MATLAB分析系统的性能。
三、设计总体思路
(1)、根据稳态误差 的值,确定开环增益K。
的值,确定开环增益K。
(2)、利用已确定的开环增益K,确定校正前系统的传递函数,画出其bode图,从图上看出校正前系统的相位裕度 和剪切频率
和剪切频率 。
。
(3)、根据相位裕度的要求,计算出滞后校正装置的参数a和T。即得校正装置的传递函数,然后得到校正后系统的开环传递函数。
(4)、验证已校正系统的相位裕度和剪切频率。
四、详细设计步骤
1、由设计思路可知
(1)按要求的稳态误差系数,求出系统的开环放大系数K。
因为题目要求在单位斜坡输入下的稳态误差为ess <0.05
所以有 ess=lim 1/ [s·G0(s)]=1/k<0.05
k>20,
所以此次取定K=21。
(2)将k值代入原函数并令s=jw,得系统的开环频率特性为
G0(jw)=21/[jw(jw+1)]
(3)此次选择滞后校正对系统进行校正。
利用Matalab画出校正前系统的伯德图如图一:
源代码:no=[21];
do=[0.02 0.3 1 0];
syso=tf(no,do);
margin(syso);
grid
运行结果:相角裕量 Pm =﹣8.74 截止频率 Wcp = 8.32
(4)根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出b和T值并确定校正装置的传递函数。
(5)研究已校正系统的伯德图,检查全部性能指标是否满足要求。
图一
2、详细设计
Ⅰ、校正前的系统分析
(1)单位阶跃响应分析
源代码: G=tf([21],[0.02 0.3 1 0 ]);
G1=feedback(G,1);
t=0:0.01:5;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正前单位阶跃响应’);
在Matlab中运行得到单位阶跃响应图如图二
图二 校正前单位阶跃响应
由图二可知,系统在单位阶跃输入下,开始时振荡比较大,超调量也比较大,系统的动态性能不佳。
(2)开环传递函数bode图分析
由图一可看出,相角裕量γ=17.50 截止频率wc=2.46rad/s。此时相角裕量不符合要求。
Ⅱ、系统校正过程
(1) 根据相角裕量γ≥450的要求,再考虑到串接滞后校正装置的相角滞后,从未校正系统的频率特性曲线图1上,找出对应相角-1800+(450+50)=-1300处的频率wc’≈2.46rad/s。wc’将作为校正后系统的增益交界频率。
(2) 确定滞后装置的传递函数 Gc=(1+aTs)/(1+Ts)
①根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出a值。
在wc=wc’处,从未校正的对数幅频特性曲线上求得 :
20lg|G0(jwc’)|=17.5dB···················①
再由20lg 1/a=17.5dB 计算出a=0.133
②由 1/(aT)=1/10·wc’所以当wc’≈2.46rad/s a=0.133时,可求得
T=30.56s
③将所求的a值和T值代入①式得校正装置的传递函数为:,
Gc(s)=(1+4.06448s)/(1+30.56s)
利用Matlab画出校正装置的Bode图 如图三
源代码:G0=tf([4.06448 1],[ 30.56 1]);
margin(G0);
图三校正装置bode图
(3)已校正后系统的开环传递函数为
G(s)= G0(s)·Gc(s)
=21(1+4.06448s)/[s(0.1s+1)(0.2s+1)(1+30.56s)]
利用Matalab画出校后系统的伯德图如图四
源代码:
n1=21;
d1=[0.02 0.3 1 0]
s1=tf(n1,d1);
s2=tf([4.06448 1],[ 30.56 1]);
s=s1*s2;
[Gm,Pm,Wcm,Wcp]=margin(s)
margin(s)
图四校正后bode图
运算结果:相角裕量Pm =45.2 截止频率 Wcp =2.45
Ⅲ、校正后验证
(1)校正后伯德图分析
由图三可知校正后的
相角裕量γ’=45.2>450
截止频率wc’’=2.45rad/s<3rad/s
符合设计题目的要求。
(2)校正后系统的单位阶跃响应图 图五
源代码:G=tf([85.35408 21 ],[0.6112 9.188 30.86 1 0]);
G1=feedback(G,1);
t=0:0.1:10;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正后单位阶跃响应’);
图五 校正后单位阶跃响应图
(3)将校正前后以及校正装置的伯德图放入同一个图中如图六
源代码:
G1=tf([21], [0.02 0.3 1 0]);
G2= tf([4.06448 1],[ 30.56 1]);
G3= tf([85.35408 21],[0.6112 9.188 30.86 1 0]);
[gm,pm,wg,wp]=margin(G1);
bode(G1,'r--',G2,'g',G3);
grid

图六 校正前后和校正装置bode图
(校正前—红色 校正装置—绿色 校正后—蓝色)
由图六可看出,系统加入滞后校正装置后,在w>0.0229rad/s的频率范围内,滞后装置衰减了G(jw)的幅值,使系统的wc左移到wc’,使系统的快速性下降。
五、设计总结
本次设计是我是运用了滞后校正装置控制系统。在自动控制原理课程中校正系统有多种形式,特定的情况需要使用特定的校正装置,通过学习,我们应能够正确的将合适的校正装置应用于给定的系统,而本次课程设计三种方法都是可以的。
而本次设计中主要运用的是MATLAB,之前虽然接触过但是对它的运用不怎么熟悉,通过这次课程设计,使我对MATLAB的运用有了进一步的了解。
此次课程设计也进一步的培养了我们的动手能力,课堂学习主要注重于理论知识,而我们要将所学知识应用于实际,在此阶段,课程设计便是最好的选择了,通过课程设计,我们可以温习我们所学的理论知识,同时为将理论知识运用于实际搭建了一个很好的平台,不仅如此,通过这次的课程设计,使我知道了在当今的信息技术如此发达的世界中,我们必须运用多种渠道,去学习研究。并要很好的运用计算机和一些软件,只有这样,我们才能更好地、精确地、快速地解决问题。还有就是提高了自主解决问题的能力。
六、参考文献
[1] 杨庚辰.自动控制原理.西安电子科技大学出版社.1994.4
[2] 朱衡君.MATLAB语言及实践教程(第二版).清华大学出版社.2009.8
[3] 张静.MATLAB在控制系统中的应用.电子工业出版社.2007