
自动控制原理课程设计报告
课程名称:自动控制原理
设计题目:自动控制原理MATLAB仿真
院 系:自机学院
班 级:电气(1)班
设 计 者:**
学 号:***004170219
指导教师:************
设计时间:2013年1月
一. 实验目的和意义:
1. 了解matlab 软件的基本特点和功能,熟悉其界面,菜单和工具条;掌握线性系统模型的计算机表示方法,变换以及模型间的相互转换。了解控制系统工具箱的组成,特点及应用;掌握求线性定常连续系统输出响应的方法,运用连续系统时域响应函数(impulse,step,lsim),得到系统的时域响应曲线。
2. 掌握使用MATLAB软件作出系统根轨迹;利用根轨迹图对控制系统进行分析;掌握使用MATLAB软件作出开环系统的波特图,奈奎斯图;观察控制系统的开环频率特性,对控制系统的开环频率特性进行分析。
3. 掌握MATLAB软件中simulink工具箱的使用;熟悉simulink中的功能模块,学会使用simulink对系统进行建模;掌握simulink的方真方法。
二. 实训内容
1. 用matlab语言编制程序,实现以下系统:
1)
G(s)= 
程序:
num=[5 24 0 18];
den=[1 4 6 2 2];h=tf(num,den)
h=tf(num,den)
Transfer function:
5 s^3 + 24 s^2 + 18
-----------------------------
s^4 + 4 s^3 + 6 s^2 + 2 s + 2
2)
G(s)=
输入以下程序
n1=4*[1 2];
n2=[1 6 6];
n3=[1 6 6];
num=conv(n1,conv(n2,n3));
d1=[1 1];
d2=[1 1];
d3=[1 1];
d4=[1 3 2 5];
den1=conv(d1,d2);
den2=conv(d3,d4);
>> den=[den1 den2 0];
>> h=tf(num,den)
Transfer function:
4 s^5 + 56 s^4 + 288 s^3 + 672 s^2 + 720 s + 288
-----------------------------------------------------
s^8 + 2 s^7 + s^6 + s^5 + 4 s^4 + 5 s^3 + 7 s^2 + 5 s
2. 两环节G1,G2串联,求等效的整体传递函数G(s)
G1(s)= G2(s)=
G2(s)=
程序:
n1=[2];d1=[1 3];sys1=tf(n1,d1);
n2=[7];d2=[1 2 1];sys2=tf(n2,d2);
sys12=sys1*sys2
Transfer function:
14
---------------------
s^3 + 5 s^2 + 7 s + 3
3.两环节G1,,G2并联,求等效的整体传递函数G(s)
G1(s)= G2(s)=
输入以下指令:
num1=[2];den1=[1 3];sys1=tf(num1,den1);
num2=[7];den2=[1 2 1];sys2=tf(num2,den2);
sys12=sys1+sys2
Transfer function:
2 s^2 + 11 s + 23
---------------------
s^3 + 5 s^2 + 7 s + 3
4.已知系统结构如图,求闭环传递函数。其中的两环节G1,G2分别为G1(s)= G2(s)=
G2(s)=
输入以下指令:
n1=[3 100];d1=[1 2 81];
n2=[2];d2=[2 5];
s1=tf(n1,d1);s2=tf(n2,d2);
sys=feedback(s1,s2)
Transfer function:
6 s^2 + 215 s + 500
---------------------------
2 s^3 + 9 s^2 + 178 s + 605
5. 已知某闭环系统的传递函数为G(s)= ,求其单位阶跃响应曲线,单位脉冲响应曲线。
,求其单位阶跃响应曲线,单位脉冲响应曲线。
1)单位阶跃响应
输入如下指令:
num=[10 25];
den=[0.16 1.96 10 25];
y=step(num,den,t);plot(t,y);
grid;(绘制单位阶跃响应图)
title;(单位阶跃响应曲线图)
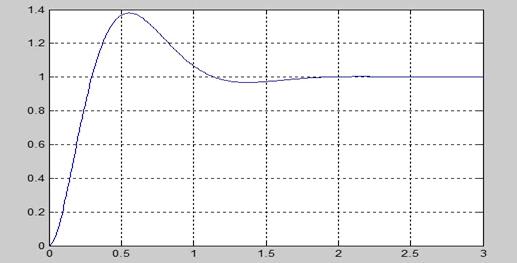
图5.1.1系统的阶跃响应曲线
2)单位脉冲响应
输入如下指令:
num=[10 25];
den=[0.16 1.96 10 25];
t=0:0.01:3;
y=impulse(num,den,t);
plot(t,y);grid;

图5.1.2系统的脉冲响应曲线
6.典型二阶系统的传递函数为G(s)= ,
, 为自然频率,
为自然频率, 为阻尼比,试绘制出当=0.5,分别取-2 ,0 ,2 ,4 ,6 ,8 ,10时该系统的单位阶跃响应曲线;分析阻尼比分别为-0.5,-1时系统的稳定性。
为阻尼比,试绘制出当=0.5,分别取-2 ,0 ,2 ,4 ,6 ,8 ,10时该系统的单位阶跃响应曲线;分析阻尼比分别为-0.5,-1时系统的稳定性。
输入如下指令:
(1).当 =0.5,
=0.5, 分别取-2、0、2、4、6、8、10时
分别取-2、0、2、4、6、8、10时
w=0:2:10;
kosai=0.5;
figure(1)
hold on
for Wn=w
num=Wn^2;
den=[1,2*kosai*Wn,Wn^2];
step(num,den);
end
hold off
grid on;
title('单位阶跃响应')
xlabel('时间')
ylabel('振幅')
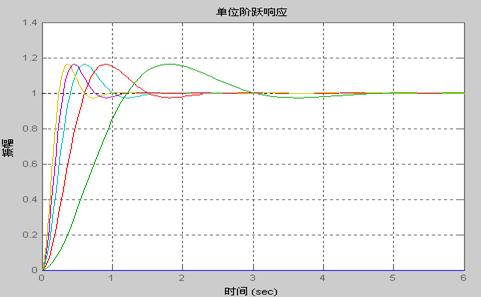
图6.1.1=0.5,分别取-2、0、2、4、6、8、10时的曲线图
(2).当=-0.5
w=0:2:10;
kosai=-0.5;
figure(1)
hold on
for Wn=w
num=Wn^2;
den=[1,2*kosai*Wn,Wn^2];
step(num,den);
end
hold off
grid on;
title('单位阶跃响应')
xlabel('时间')
ylabel('振幅')
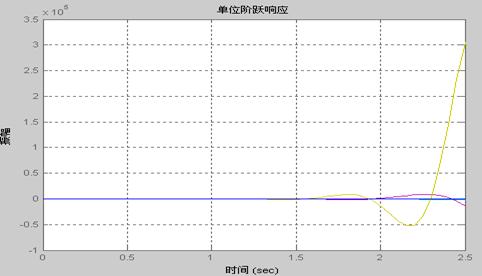
图6.1.2=-0.5时,系统的单位阶跃响应曲线图
(3.当=-1
w=0:2:10;
kosai=-1;
figure(1)
hold on
for Wn=w
num=Wn^2;
den=[1,2*kosai*Wn,Wn^2];
step(num,den);
end
hold off
grid on;
title('单位阶跃响应')
xlabel('时间')
ylabel('振幅')
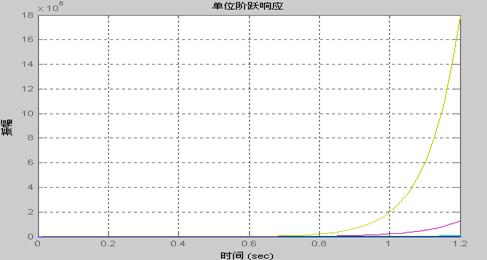
图6.1.3=-1时单位阶跃响应曲线图
分析:由以上结果可以知道当确定,取-0.5和-1时,其单位阶跃响应曲线是发散的,所以系统不稳定。阻尼比越大,振荡越弱,平稳性越好,反之,阻尼比越小,振荡越强,平稳性越差。
7.设有一高阶系统开环传递函数为G(s)= ,试绘制该系统的零极点图和闭环根轨迹图。
,试绘制该系统的零极点图和闭环根轨迹图。
1)系统的零极点
输入如下指令:
num=[0.016 0.218 1.436 9.359];
den=[0.06 0.268 0.635 6.271];
[z,p,k]=tf2zp(num,den)
运行结果:
z =
-10.4027
-1.6111 + 7.3235i
-1.6111 - 7.3235i
p =
-5.7710
0.6522 + 4.2054i
0.6522 - 4.2054i
k =
0.2667
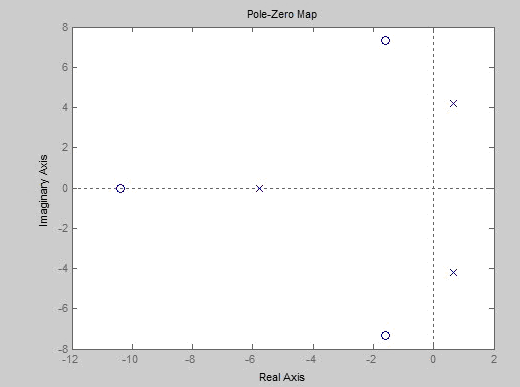
图7.1.1 系统的零极点图
2)系统的闭环根轨迹
输入如下指令:
num=[0.016 0.218 1.436 9.359];
den=[0.06 0.268 0.635 6.271];
rlocus(num,den)
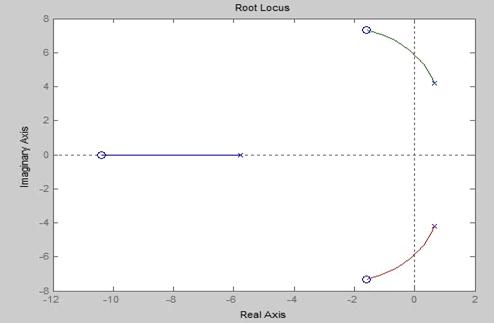
图7.1.2 系统的闭环根轨迹图
8.单位反馈系统前向通道的传递函数为:G(s)= ,试绘制该系统的Bode图和Nyquist曲线,说明软件绘制曲线与手动绘制曲线的异同。
,试绘制该系统的Bode图和Nyquist曲线,说明软件绘制曲线与手动绘制曲线的异同。
1)绘制该系统的Bode图:
输入如下指令:
num=[0 0 2 8 12 8 2];
den=[1 5 10 10 5 1 0];
margin(num,den)
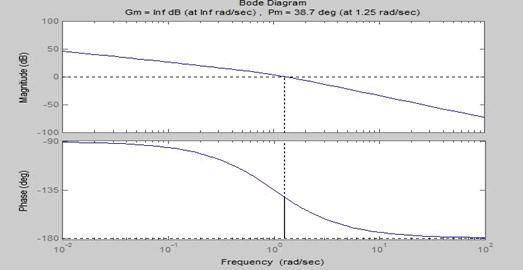
图8.1.1 系统的Bode图
2)系统的Nyquist图
输入如下指令:
num=[0 0 2 8 12 8 2];
den=[1 5 10 10 5 1 0];
nyquist(num,den)

图8.1.2 系统Nyquist曲线
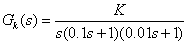
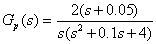
9.已知某控制系统的开环传递函数G(s)= ,
, =1.5,试绘制系统的开环频率特性曲线,并求出系统的幅值和相位裕量。
=1.5,试绘制系统的开环频率特性曲线,并求出系统的幅值和相位裕量。
输入如下指令:
d1=[1 1];
d2=[1 2]
den1=conv(d1,d2); den=[den1 0];
num=[10];
bode(num,den)
程序运行结果如图所示
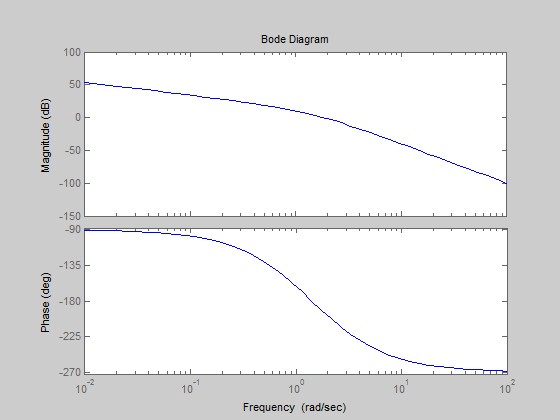
图9.1.1 系统的开环频率特性曲线
[gm,pm,wcg,wcp]=margin(num,den)
运行结果如下:
Gm=0.6000 %幅值裕量
pm = -12.9919 %相角裕量
wcg =1.4142 %Nyquist 曲线与负实轴交点处频率
wcp =1.8020 %截止频率
10.在SIMULINK中建立系统,该系统阶跃输入时的连接示意图如下。K为学生学号后三位。绘制其单位阶跃响应曲线,分析其峰值时间,延迟时间,上升时间,调节时间及超调量。

输入如下程序:
num=[219];
den=[1 9 219];
step(num,den);
grid;
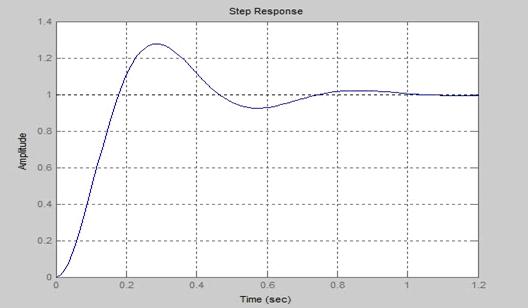
图10.1.1 单位阶跃响应曲线
分析其峰值时间 ,延迟时间
,延迟时间 ,上升时间
,上升时间 ,调节时间
,调节时间 及超调量
及超调量
num=[219];
den=[1 9 219];
[y,x,t]=step(num,den);
[peak,k]=max(y);
overshoot=(peak-1)*100
tp=t(k)
n=1;
while y(n)<1
n=n+1;
end
tr=y(n)
m=length(t)
while((y(m)>0.98)&(y(m)<1.02))
m=m-1;
运行结果:
overshoot =
36.6697
tp =
0.2209
tr =
1.0132
m =
115
ts =
0.7485
11.给定系统如下图所示,设计一个串联校正装置,使幅值裕度大于h>10分贝,相位裕度 大于等于45度。
大于等于45度。
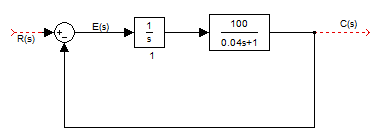
程序如下:
G=tf(100,[0.04,1,0]);
[Gw,Pw,Wcg,Wcp]=margin(G)
G1=tf(100,[0.04,1,0]);
G2=tf(100*[0.025,1],conv([0.04,1,0],[0.01,1]))
bode(G1)
hold
bode(G2,'r')
grid
figure
G1c=feedback(G1,1);
G2c=feedback(G2,1);
step(G1c)
hold
step(G2c,'r')
grid
结果如下:
Gw =
Inf
Pw =
28.0243
Wcg =
Inf
Wcp =
46.9701
Transfer function:
2.5 s + 100
-------------------------
0.0004 s^3 + 0.05 s^2 + s
矫正前后的bode图和域响应图如下:
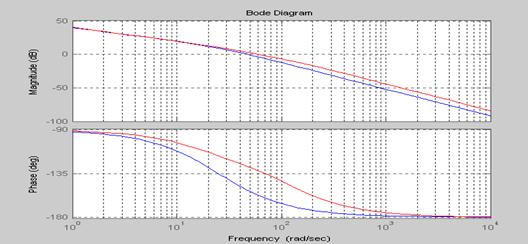
图11.1矫正前后的bode图
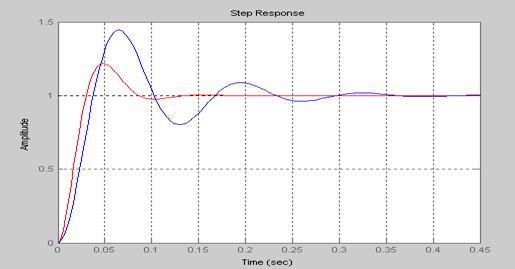
图11.2矫正前后的时域响应图
三.总结
本次课题设计,不仅是对前面所学知识的一种检验,而且是对自己能力的一种提升。在设计过程中,我们通过到图书馆借阅了大量的自动控制原理MATLAB实现的相关资料,自学的时候与同学交流探讨,一步一步的分析和研究,并在老师和同学的帮助下,解决各种问题,最终完成了课题设计。在此期间遇到了不少问题,首先是对之前所学知识的遗忘,再次,MATLAB的初次见面也很陌生。不仅要复习自动控制原理的相关知识,还要学习MATLAB软件的使用。
通过这次课程设计,我巩固了自动控制原理所学的基本知识。同时,最主要的是对MATLAB软件有了初步了解,为以后的学习奠定一定的基础。也使我们明白了实践与理论相结合的重要性。在此过程中态度问题也是非常重要的。
初步使用MATLAB时,不是很熟悉,出现了许多的问题,影响了实验的准确性。通过这次课题设计,锻炼了我们独立思考和动手解决控制系统实际问题的能力;让我们学会使用MATLAB和Simulink动态仿真工具进行仿真与调试,更能提高我们自身的能力,理论与实践相结合,有助于我们自己的学习研究!
四.参考文献
【1】程鹏,自动控制原理(第二版),高等教育出版社,2003
【2】胡松涛,自动控制原理简明教程(第二版),科学出版社,2009
【3】赵广元,MATLAB与控制系统仿真实践,北京航空航天大学出版社,2009
【4】张德丰,MATLAB自动控制设计,北京机械工业出版社,2010
【5】黄忠霖,自动控制原理的MATLAB实现,北京国防工业出版社,2006
第二篇:自动控制原理课程设计题目1
自动控制原理课程设计题目及要求
一、单位负反馈随动系统的开环传递函数为
1、画出未校正系统的Bode图,分析系统是否稳定
2、画出未校正系统的根轨迹图,分析闭环系统是否稳定。
3、设计系统的串联校正装置,使系统达到下列指标
(1)静态速度误差系数Kv≥100s-1;
(2)相位裕量γ≥30°
(3)幅频特性曲线中穿越频率ωc≥45rad/s。
4、给出校正装置的传递函数。
5、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc、相位裕量γ、相角穿越频率ωg和幅值裕量Kg。
6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
二、设单位负反馈随动系统固有部分的传递函数为

1、画出未校正系统的Bode图,分析系统是否稳定。
2、画出未校正系统的根轨迹图,分析闭环系统是否稳定。
3、设计系统的串联校正装置,使系统达到下列指标:
(1)静态速度误差系数Kv≥5s-1;
(2)相位裕量γ≥40°
(3)幅值裕量Kg≥10dB。
4、给出校正装置的传递函数。
5、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc、相位裕量γ、相角穿越频率ωg和幅值裕量Kg。
6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
三、设单位负反馈系统的开环传递函数为 
1、画出未校正系统的根轨迹图,分析系统是否稳定。
2、设计系统的串联校正装置,要求校正后的系统满足指标:
闭环系统主导极点满足ωn=4rad/s和ξ=0.5。
3、给出校正装置的传递函数。
4、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc、相位裕量γ、相角穿越频率ωg和幅值裕量Kg。
5、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
6、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
四、设单位负反馈系统的开环传递函数为 
1、画出未校正系统的根轨迹图,分析系统是否稳定。
2、设计系统的串联校正装置,要求校正后的系统满足指标:
(1)静态速度误差系数Kv=5s-1;
(2)维持原系统的闭环主导极点基本不变。
3、给出校正装置的传递函数。
4、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc、相位裕量γ、相角穿越频率ωg和幅值裕量Kg。
5、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
6、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
五、单位负反馈随动系统的开环传递函数为
1、画出未校正系统的Bode图,分析系统是否稳定
2、画出未校正系统的根轨迹图,分析闭环系统是否稳定。
3、设计系统的串联校正装置,使系统达到下列指标
(1)静态速度误差系数Kv≥4s-1;
(2)相位裕量γ≥40°
(3)幅值裕量Kg≥12dB。。
4、给出校正装置的传递函数。
5、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc、相位裕量γ、相角穿越频率ωg和幅值裕量Kg。
6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
六、单位负反馈随动系统的开环传递函数为
1、画出未校正系统的Bode图,分析系统是否稳定
2、画出未校正系统的根轨迹图,分析闭环系统是否稳定。
3、设计系统的串联滞后超前校正装置,使系统达到下列指标
(1)静态速度误差系数Kv≥100s-1;
(2)相位裕量γ≥40°
(3)幅频特性曲线中穿越频率ωc=20rad/s。
4、给出校正装置的传递函数。
5、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc、相位裕量γ、相角穿越频率ωg和幅值裕量Kg。
6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
七、已知串联校正单位负反馈系统的对象和校正装置的传递函数分别为
 ,
, 
校正装置在零点和极点可取如下数值:(1) ,
, ;(2)
;(2) ,
, ;(3)
;(3) ,
, 。若保证闭环主导极点满足ξ=0.45,试分别对三种情况设计Kc,并比较它们的闭环极点位置、静态速度误差系数和时间响应快速性。
。若保证闭环主导极点满足ξ=0.45,试分别对三种情况设计Kc,并比较它们的闭环极点位置、静态速度误差系数和时间响应快速性。
1、画出未校正系统的根轨迹图,分析系统是否稳定。
2、分别对三种情况设计Kc,使校正后的系统满足指标:
闭环系统主导极点满足ξ=0.45。
3、分别画出校正前,校正后和校正装置的幅频特性图和根轨迹示意图。
4、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
5、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
八、设单位负反馈随动系统固有部分的传递函数为

1、画出未校正系统的Bode图,分析系统是否稳定。
2、画出未校正系统的根轨迹图,分析闭环系统是否稳定。
3、设计系统的串联校正装置,使系统达到下列指标:
(1)静态速度误差系数Kv=20s-1;
(2)相位裕量γ≥50°
(3)幅值裕量Kg≥10dB。
4、给出校正装置的传递函数。
5、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc、相位裕量γ、相角穿越频率ωg和幅值裕量Kg。
6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
九、设单位负反馈系统的开环传递函数为 
1、画出未校正系统的根轨迹图,分析系统是否稳定。
2、设计系统的串联校正装置,要求校正后的系统满足指标:
(1)静态速度误差系数Kv=50s-1;
(2)闭环主导极点满足ωn=5rad/s和ξ=0.5。
3、给出校正装置的传递函数。
4、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc、相位裕量γ、相角穿越频率ωg和幅值裕量Kg。
5、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
6、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
十、设单位负反馈控制系统的开环传递函数为
1、画出未校正系统的Bode图,分析系统是否稳定。
2、画出未校正系统的根轨迹图,分析闭环系统是否稳定及其性能特点。
3、设计如图所示的桥式T形网络(校正装置),消去传递函数中的复数极点。
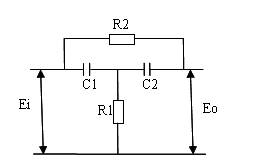
4、给出校正装置的传递函数。
5、分别画出校正前,校正后和校正装置的幅频特性图。计算校正后系统的穿越频率ωc、相位裕量γ、相角穿越频率ωg和幅值裕量Kg。
6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
7、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
说明:
1、题目分配

2、每行同学是一组(红体字),每位同学独立完成课程设计报告,不得雷同!做同一个题目的学生,所采用的设计方法或参数不能完全相同。
3、设计报告使用课程设计专用封面和纸张撰写,每份报告用文件袋装好,上边贴封面。
4、课程设计报告内容:
(1)设计题目、设计指标要求;
(2)设计原理及设计步骤:设计报告要写出详细的设计步骤,每步设计时用到的理论依据和结果。设计报告要按照题目要求的顺序书写(手写、打印均可)。如有参考资料,要求列出参考资料的名称。
(3)课程设计过程中的遇到的问题及解决的方法;
(4) 课程设计心得体会
全面总结课程设计中自己所做的工作、心得体会,提出改进意见。
5、时间安排:20##年12月8日—20##年12月19日,20##年12月19日上午按组交设计报告。
6, 指导教师:黄敏