课程设计任务书
学生姓名: 陈智 专业班级: 自动化0801班
指导教师: 张立炎 工作单位: 自动化学院
题 目: 用MATLAB进行控制系统的滞后校正设计。
初始条件:已知一单位反馈系统的开环传递函数是
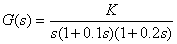
要求系统的静态速度误差系数 ,
, 。
。
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)
1、用MATLAB作出满足初始条件的K值的系统伯德图,计算系统的幅值裕量和相位裕量。
2、系统前向通路中插入一相位滞后校正,确定校正网络的传递函数。
3、用MATLAB画出未校正和已校正系统的根轨迹。
4、课程设计说明书中要求写清楚计算分析的过程,列出MATLAB程序和MATLAB输出。说明书的格式按照教务处标准书写。
时间安排:

指导教师签名: 年 月 日
系主任(或责任教师)签名: 年 月 日
目录
1 滞后校正系统的设计系统滞后校正设计方案....... 1
1.1 设计原理.................................. 1
1.2 设计步骤.................................. 2
2 设计串联滞后校正............................ 3
2.1 校正前参数确定............................ 3
3 系统前向通路中插入一相位滞后校正............. 4
3.1 确定校正网络的传递函数..................... 4
3.2 应用MATLAB进行验证....................... 6
3.3 波特图的理论绘制........................... 7
3.4 用MATLAB进行设计......................... 8
4 画出未校正和已校正系统的根轨迹.............. 10
4.1 用MATLAB画出未校正系统和已校正系统的根轨迹 10
4.2 根轨迹的理论作图步骤...................... 11
5 设计总结.................................. 12
6 收获与体会................................ 13
参考文献.................................... 15
1 滞后校正系统的设计系统滞后校正设计方案
1.1设计原理
所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,从而满足给定的各项性能指标。系统校正的常用方法是附加校正装置。按校正装置在系统中的位置不同,系统校正分为串联校正、反馈校正和复合校正。按校正装置的特性不同,又可分为超前校正、滞后校正和滞后-超前校正、PID校正。
这里我们主要讨论串联校正。一般来说,串联校正设计比反馈校正设计简单,也比较容易对信号进行各种必要的形式变化。在直流控制系统中,由于传递直流电压信号,适于采用串联校正;在交流载波控制系统中,如果采用串联校正,一般应接在解调器和滤波器之后,否则由于参数变化和载频漂移,校正装置的工作稳定性很差。
串联超前校正是利用超前网络或PD控制器进行串联校正的基本原理,是利用超前网络或PD控制器的相角超前特性实现的,使开环系统截止频率增大,从而闭环系统带宽也增大,使响应速度加快。
在有些情况下采用串联超前校正是无效的,它受以下两个因素的限制:
1)闭环带宽要求。若待校正系统不稳定,为了得到规定的相角裕度,需要超前网络提高很大的相角超前量。这样,超前网络的a值必须选得很大,从而造成已校正系统带宽过大,使得通过系统的高频噪声电平很高,很可能使系统失控。
2) 在截止频率附近相角迅速减小的待校正系统,一般不宜采用串联超前校正。因为随着截止频率的睁大,待校正系统相角迅速减小,使已校正系统的相角裕度改善不大,很难得到足够的相角超调量。
串联滞后校正是利用滞后网络或PID控制器进行串联校正的基本原理,利用其具有负相移和负幅值的特斜率的特点,幅值的压缩使得有可能调大开环增益,从而提高稳定精度,也能提高系统的稳定裕度。
在系统响应速度要求不高而抑制噪声电平性能要求较高的情况下,可以考虑采用串联滞后校正。此外,如果待校正系统已具备满意的动态性能,仅稳态性能不能满足指标要求,也可以采用串联滞后校正以提高系统的稳态精度,同时保持其动态性能仍然满足性能指标要求。
滞后校正装置的传递函数为:
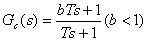 (1-1)
(1-1)
它提供一个负实轴上的零点 和一个负实轴上的极点
和一个负实轴上的极点 。零、极点之间的距离由
。零、极点之间的距离由 值决定。
值决定。
由于 <1,极点位于零点右边,对于s平面上的一个动点
<1,极点位于零点右边,对于s平面上的一个动点 ,零点产生的向量角小于极点产生的向量角,因此,滞后校正装置总的向量角为负,故称为滞后校正。
,零点产生的向量角小于极点产生的向量角,因此,滞后校正装置总的向量角为负,故称为滞后校正。
1.2 设计步骤
所研究的系统为最小相位单位反馈系统,则采用频域法设计串联无源滞后网络的步骤如下:
1) 根据稳态速度误差 的要求,确定开环增益K;
的要求,确定开环增益K;
2) 利用已确定的的开环增益K,在校正前系统的对数频率特性波特图上,找出相角为 (
( )=
)=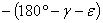 的频率作为校正后系统的截止频率,其中,
的频率作为校正后系统的截止频率,其中, 为要求的相角裕度,
为要求的相角裕度, 为补偿滞后校正在上产生的相位滞后,一般取
为补偿滞后校正在上产生的相位滞后,一般取 ;
;
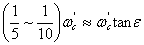
3) 在未校正系统的波特图上取
 (或由20lg
(或由20lg 求取)的分贝值,根据下述关系式确定滞后网络参数(<1)和T:
求取)的分贝值,根据下述关系式确定滞后网络参数(<1)和T:
20lg =
= () (1-2)
() (1-2)
 =
= (1-3)
(1-3)
式(1-2)中,在 处,设计滞后校正的幅值与原系统的幅值反向相等才能相互抵消,使校正后系统的截止频率为。
处,设计滞后校正的幅值与原系统的幅值反向相等才能相互抵消,使校正后系统的截止频率为。
4) 验算已校正系统的相角裕度和幅值裕度h。
2 设计串联滞后校正
2.1校正前参数确定
1.已知一单位反馈系统的开环传递函数是:
要求系统的静态速度误差系数 ,。
,。
由已知的单位反馈系统的开环传递 ,
, 有如下计算:
有如下计算:
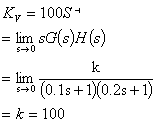
故有,
2. 接下来用MATLAB求出系统校正前的幅值域度和相角裕度,并画出波特图:
在MATLAB中输入:
G=tf(100,[0.02 0.3 1 0]); [kg,r]=margin(G)
margin(G)
MATLAB得出的结果如下:
Transfer function:
100
----------------------
0.02 s^3 + 0.3 s^2 + s
Warning: The closed-loop system is unstable.
kg = 0.1500
r = -40.4367
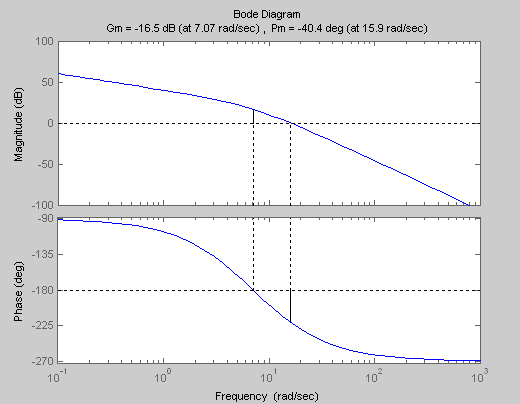 运算得出的波特图:
运算得出的波特图:
图 2-1 校正前系统的波特图
由图可以看出幅值裕度h(h=20lgkg)和相角裕度γ小于零,且γ负值较大,因此该系统不稳定,需要串联一个滞后校正环节进行校正,使系统趋于稳定。
3 系统前向通路中插入一相位滞后校正
3.1确定校正网络的传递函数
在系统前向通路中插入一相位滞后校正,确定校正网络的传递函数如下,
由 = -(180°--ε),式中ε一般取5°~10°,而
= -(180°--ε),式中ε一般取5°~10°,而 为题目要求的系统校正后的相角裕度,所以为
为题目要求的系统校正后的相角裕度,所以为
=-90°-arctan -arctan
-arctan
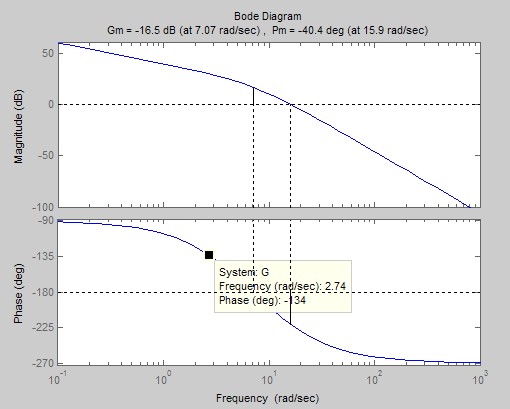
图3-1 校正前波特图上求取
则可以在上面得出的波特图中找到,=2.74rad/sec。
根据式(1-9)和式(1-10)确定滞后网络参数 和T:
和T:
20lg==20lg
=0.1
得出= =0.032, T=112.66;
=0.032, T=112.66;
在知道了和T后则可以确定校正环节的传递函数: 即为 :
即为 :
则校正后的传递函数为:

=
3.2应用MATLAB进行验证
>> G=tf(100*[3.61 1], conv([0.02,0.3,1,0],[112.66,1]))
[kg,r]=margin(G)
margin(G)
得到的MATLAB结果是:
Transfer function:
361 s + 100
-----------------------------------
2.253 s^4 + 33.82 s^3 + 113 s^2 + s
kg = 4.3042
r = 40.5160
系统校正后的波特图:

图3-2 系统校正后的波特图
由上面得出的数据可以看出,在串联了一个滞后校正环节后,系统稳定 ,满足
,满足 ,增益裕度不小于10分贝。
,增益裕度不小于10分贝。
3.3 波特图的理论绘制
波特图由两幅图组成。一幅是对数幅频特性,横坐标是频率ω,但是是以对数分度,纵坐标是幅频特性的分贝值即20lg ,表明了幅频特性与频率的关系。另一幅是对数相频特性图,横坐标的值是频率ω,也是对数分度,纵坐标为相角
,表明了幅频特性与频率的关系。另一幅是对数相频特性图,横坐标的值是频率ω,也是对数分度,纵坐标为相角 线性分度,表明了相频与频率的关系。
线性分度,表明了相频与频率的关系。
1.根据校正前的开怀传递函数 化为:
化为: ,
,
1) 由波特图标准型知,开环传递系数K=100,转折频率 ;
;
2) 绘制对数坐标,并将各个转折频率标注在坐标轴上;
3) 确定低频段:因为存在积分环节,所以对数幅频特性的低频段是-20dB/dec的斜线,且对于ν型系统的对数幅频特性的低频段特性:

 (K/
(K/ ^ν)即K=^ν
^ν)即K=^ν 10^(/20)
10^(/20)
则 过点(100,0),即可确定低频段。
过点(100,0),即可确定低频段。
4) 将低频段延伸到第一个转折频率 处,因为是惯性环节的转折频率,所以,开环对数幅频特性的渐近线下降20dB/dec,即-40dB/dec ;再延伸到第二个转折频率
处,因为是惯性环节的转折频率,所以,开环对数幅频特性的渐近线下降20dB/dec,即-40dB/dec ;再延伸到第二个转折频率 处,因为也是惯性环节,所以再下降20dB/dec,即-60dB/dec。
处,因为也是惯性环节,所以再下降20dB/dec,即-60dB/dec。
5) 绘制相频特性:绘制各个环节的对数相频特性曲线,然后逐点叠加,一般在各个转折频率处进行叠加。
6) 修正对数幅频特性。
2.根据校正后的开环传递函数 ,化为
,化为
 ,则与1.同理:
,则与1.同理:
1) 确定开环传递系数K=100,转折频率

 ,
, ;
;
2) 绘制对数坐标,并将各个转折频率标注在坐标轴上;
3) 确定低频段:因为存在积分环节,所以对数幅频特性的低频段是-20dB/dec的斜线,同过点(100,0),即可确定低频段;
4) 将低频段延伸到第一个转折频率 处,开环对数幅频特性的渐近线下降20dB/dec;再延伸到第二个转折频率
处,开环对数幅频特性的渐近线下降20dB/dec;再延伸到第二个转折频率 处,因为是一阶微分,所以上升20dB/dec;再依次延伸到第三、四个转折频率分别下降20dB/dec;
处,因为是一阶微分,所以上升20dB/dec;再依次延伸到第三、四个转折频率分别下降20dB/dec;
5) 绘制相频特性:绘制各个环节的对数相频特性曲线,然后逐点叠加,一般在各个转折频率处进行叠加;
6) 修正对数幅频特性。
3.4用MATLAB进行设计
MATLAB中建立M文件,程序如下:
no=100;
do=[0.02 0.3 1 0];
syso=tf(no,do);
bode(syso);
[gmo,pmo,wgo,wpo]=margin(syso)
[kg,r]=margin(syso)
%需加滞后校正环节Gc(s)=(bTs+1)/(Ts+1)计算已校正系统截止频率wc’
gama=40;
gama0=-(180-gama-6);
[mu,pu,w]=bode(syso)
wc=spline(pu,w,(gama0)) %根据己知的pu,w,用样条函数插值出xi处的值
%计算b
na=polyval(no,j*wc);% 计算多项式的值
da=polyval(do,j*wc);
g=na/da;
g1=abs(g);
h=20*log10(g1);%计算幅值裕度
b=10^(-h/20) ;
%计算校正环节
T=10/(wc*b);
sysc=tf([b*T,1],[T,1]) ;
sys=syso*sysc
hold on
bode(sys)
[gm,pm,wg,wp]=margin(sys)
[kg,r]=margin(sys)
计算结果为
wc = 2.7368
Transfer function:
365.4 s + 100
-------------------------------------
2.259 s^4 + 33.91 s^3 + 113.3 s^2 + s
gm = 4.2685
pm = 40.3491
wg = 6.7842
wp = 2.7471
校正前和校正后的波特图:

图3-3 校正前后波特图对比
——未校正前波特图(上面一条)
——校正后波特图(下面一条)
4 画出未校正和已校正系统的根轨迹
4.1 用MATLAB画出未校正系统和已校正系统的根轨迹
MATLAB画出:
系统校正前的根轨迹为
MATLAB程序为:
num0=[0 100]; %设置传递函数的分子
den0=[0.02 0.3 1 0]; %设置传递函数的分母
num1=[365.4 100];
den1=[2.259 33.91 113.3 1 0];
subplot(2,1,1);rlocus(num1,den1);title('校正后根轨迹图')
subplot(2,1,2);rlocus(num0,den0);title('校正前根轨迹图')
%应用rlocus函数绘制根轨迹
校正前后根轨迹如图4.1所示

图4-1 校正前后根轨迹图对比
4.2 根轨迹的理论作图步骤
1.对校正前开环传递函数:
1) 分母系数n=3,则根轨迹有3条分支。存在3个极点,分别为:0,-5,-10;
2) 求渐近线与实轴交点为 ,即为
,即为 ;与实轴正方向夹角为:
;与实轴正方向夹角为: (l=0,1,2,3……),即为
(l=0,1,2,3……),即为 ;
;
3)分离点 :
: ,则有
,则有 ,解得=
,解得= (其中=
(其中= 舍去)
舍去)
4) 出射角 :
: ,∴=﹣π,0,π;
,∴=﹣π,0,π;
5) 与虚轴交点:将 代入特征根方程:D(s)=0.02s^3+0.3s^2+s+k=0或有劳斯判据求取: s^3 0.02 1
代入特征根方程:D(s)=0.02s^3+0.3s^2+s+k=0或有劳斯判据求取: s^3 0.02 1
s^2 0.3 k
s^1 1-k/15 0
s^0 k
则 ,此时对应的k=15,即与虚轴交点为
,此时对应的k=15,即与虚轴交点为 。
。
2.对校正后的开环传递函数:
1) 同 ,根轨迹有4条分支;有零点
,根轨迹有4条分支;有零点 ;
;
2) 渐近线与实轴交点为:(-4.9,0j);与实轴正方向夹角:;
3) 分离点:令A(s)=  ;B(s)=100(3.61s+1)
;B(s)=100(3.61s+1)
由 ,解得d= -0.262(舍), -2.13, -10.2(舍);
,解得d= -0.262(舍), -2.13, -10.2(舍);
4) 出射角: ;入射角
;入射角 ;
;
5) 与虚轴交点:将代入特征根方程D(s)= 2.259 s^4 + 33.91 s^3 + 113.3 s^2 + s+k(3.65s+1)=0或有劳斯判据求取,得 ,对应的k近似为423.7。
,对应的k近似为423.7。
5 设计总结
设计在系统前向通路中插入一相位滞后校正装置,关键点在于求取校正后系统的截止频率,由以下滞后校正波特图,可知为使满足式子
20lg==20lg,和校正后=180°++ε(其中,式中ε一般取5°~10°)应满足题目对的要求。满足以上两式和=0.1,求得以及参数 、
、 ,从而确定校正环节的传递函数
,从而确定校正环节的传递函数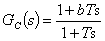 。
。
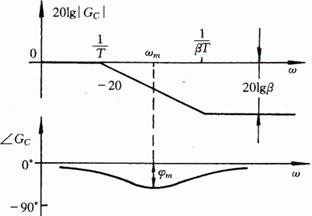
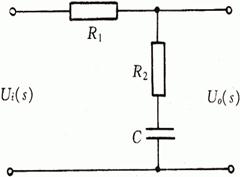
图5-1 滞后校正波特图 图5-2 滞后校正无源装置
在前向通道中串联滞后校正系统前后对比:
1.由校正前后波特图对比(图3-3),可知校正前:kg0=0.1500,γ0=-40.4367;校正后:kg=4.3042,γ=40.5160,从而由此知在前向通道中串联滞后校正装置后,幅值裕度h=20lgkg和相位裕度γ的值,得到校正前系统h0<0,γ0<0,则开环传递函数为的原系统不是稳定的;而校正后系统h>0,γ<0,则开环传递函数为的校正后系统是稳定的。
2. 由校正前后根轨迹图对比(图4-1),可知校正后与校正前相比,根轨迹图上多了一个零点和一个极点,此外,通过对系统特征方程进行劳斯判据,判断系统的稳定性,从而求得开环增益K值的范围,校正前K值的范围为 ,而校正后K值的范围近似为
,而校正后K值的范围近似为 ,通过K值范围的扩大从而可知添加校正装置后提高了系统稳定性能。
,通过K值范围的扩大从而可知添加校正装置后提高了系统稳定性能。
6收获与体会
通过这次对控制系统的滞后校正设计的分析,让我对串联滞后校正环节有了更清晰的认识,同时也学会了公式编辑器的基本使用方法,加深了对课本知识的进一步理解。
在这次课程设计的过程中,真正地做到把理论运用于实际。通过查找资料以及复习课本,在设计中的问题得到了解决,在寻找答案的过程中,我加深了对平时上课时学到的知识的理解,也体会到将理论结合实际设计、分析的成就感,还使自己看到平时学习的漏洞,因为有一些看似不起眼的小知识点有时也是需要考虑的重点。
同时,这次课程设计让自己对Matlab软件的应用更加熟练,用它对控制系统进行频域分析,大大简化了计算和绘图步骤,计算机辅助设计已经成为现在设计各种系统的主要方法和手段,因此熟练掌握各种绘图软件显得尤为重要。在今后的学习中,需要发挥积极主动的精神,把所学知识与实践结合起来,努力掌握Matlab等相关软件的使用方法。
在这次课程设计过程,也让我深深地体会团队精神的重要性。从课程设计的入手到最后分析,对于一个人来说可能是个不小的挑战,注意到每个细节更是不易,遇到问题和班上的同学一起讨论,使各种难题得到了解决。
通过这次课程设计使我懂得了理论与实际相结合是很重要的,仅有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。在设计过程中遇到的问题是很多的,但我想难免会遇到这样或那样的问题,同时在设计的过程中发现了自己的不足之处,对以前所学过的知识理解得不够深刻,掌握得不够牢固……通过这次课程设计之后,一定把以前所学过的知识重新温故。
参考文献
[1] 王万良.自动控制原理.高等教育出版社.20##年
[2] 胡寿松.自动控制原理.科学出版社.20##年
[3] 胡寿松.自动控制原理同步辅导及习题全解.中国矿业大学出版社.20##年
[4] 薛定宇.控制系统计算机辅助设计---MATLAB语言及应用. 清华大学出版社.1996年
[5] 潘丰.自动控制原理.中国林业出版社.20##年
[6] 曹戈. MATLAB教材及实训.机械工业出版社.20##年
[7] 楼顺天.基于MATLAB的系统分析与设计.西安电子科技大学出版社.1999年
[8] 张志涌.精通MATLAB6.5.上海交通大学出版社.20##年
[9] 龚剑.MATLAB入门与提高.清华大学出版社.20##年
[10] http://matlab.net.cn/