自动控制原理课程设计

专 业: 自动化
班 级:
姓 名:
学 号:
指导教师:
自动化与电气工程学院
2013 年 01月 11日
目 录
1、设计目的........................................................ 2
2、设计内容........................................................ 2
3、设计过程和步骤.................................................. 2
4、软件仿真........................................................ 6
5、电路模拟以及结果分析............................................ 7
6、思考题.......................................................... 9
7、设计小结....................................................... 10
8、参考文献....................................................... 10
连续定常系统的频率法超前校正
1.设计目的
(1)了解串联超前校正环节对系统稳定性及过渡过程的影响;
(2)掌握用频率特性法分析自动控制系统动态特性的方法;
(3)掌握串联超前校正装置的设计方法和参数调试技术;
(4)掌握设计给定系统超前校正环节的方法,并用仿真技术验证校正环节理论设计的正确性;
(5)掌握设计给定系统超前校正环节的方法,并模拟实验验证校正环节理论设计的正确性。
2.设计内容
已知单位反馈控制系统的开环传递函数为:

设计超前校正装置,使校正后系统满足:

3.设计过程和步骤
3.1 确定开环增益K
根据给定静态误差系数的要求,确定开环增益K

得K=100。
3.2画出未校正系统的伯德图
未校正系统的开环函数:

MATLAB中输入以下语句:
>> Go=zpk([],[0 -5 -100],50000);
>> bode(Go)
>> margin(Go)
得到未校正系统的Bode图,如图1所示,并由图可知未校正系统的相角余 ,剪切频率
,剪切频率 。
。
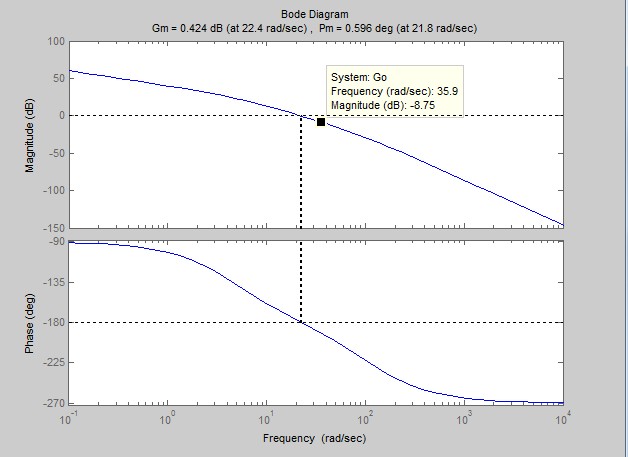
图1 未校正系统的Bode图
3.3 确定最大超前相角
由题目要求可知,校正后的系统的超调量 ,高阶系统有以下公式,
,高阶系统有以下公式,
超调量:

谐振峰值:

由以上公式可得,当  时,
时, ,由于系统的开环对数幅频特性在剪切频率处的斜率为
,由于系统的开环对数幅频特性在剪切频率处的斜率为 ,一般取
,一般取 。在这里取
。在这里取 ,由公式
,由公式
3.4 计算 角
角
由下式计算得:

3.5 计算校正装置在 处的幅值
处的幅值
由未校正系统的对数幅频特性图,求得其幅值为处的频率 ,该频率
,该频率 就是校正后系统的开环剪切频率
就是校正后系统的开环剪切频率 ,即
,即 。
。
计算校正装置在 处的幅值
处的幅值

由系统的对数幅频特性图,即图1得,未校正系统在开环对数幅值-8.86dB处对应的频率
3.6 计算超前校正网络的转折频率
由于 ,就有
,就有

即超前校正网络的传递函数是

为了补偿超前校正网络的引入而造成系统开环增益的衰减,必须使附加放大器的放大倍数为:

3.7超前校正前后系统的伯德图
校正后系统的开环传函为

在Matlab中输入以下命令:
>> Go=zpk([],[0 -5 -100],50000);
>> bode(Go)
>> margin(Go)
>> hold on
>> G=zpk([-12.98],[0 -5 -100 -114.85],384615.4);
>> bode(G)
>> margin(G)
得到校正前后系统对应的Bode图的比较图,如图2所示。
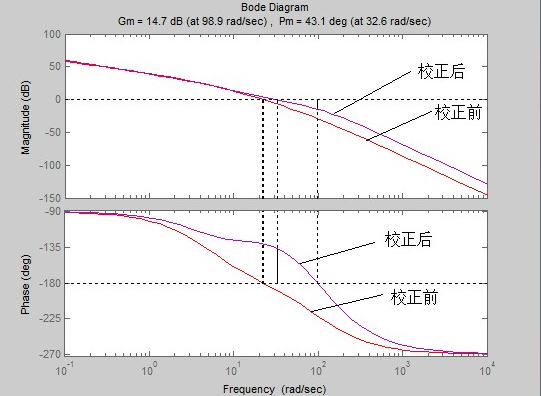
图2 校正前后系统的比较
3.8对校正后系统的验证
由校正后系统的Bode图,即图3,我们可知: ,由公式得到的
,由公式得到的  以及从图中得到
以及从图中得到 ,
, 这与题目要求相符。
这与题目要求相符。
4.软件仿真
4.1校正前后系统的原理图
如图3所示是未校正的系统以及校正后的系统在Matlab上使用Smulink进行仿真的原理图。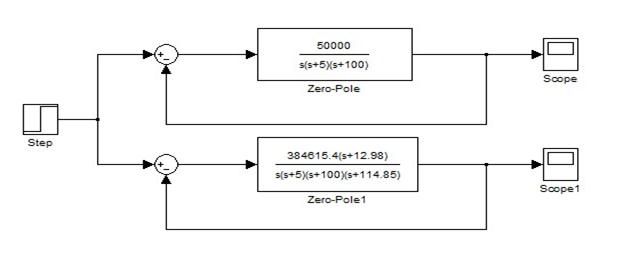
图3 校正前后Smulink仿真的原理图
4.2校正后系统的仿真图
用simulink仿真校正前系统阶跃响应的曲线如图4,由图可知,未校正系统的阶跃响应曲线是震荡衰减的,即校正前系统是稳定的。
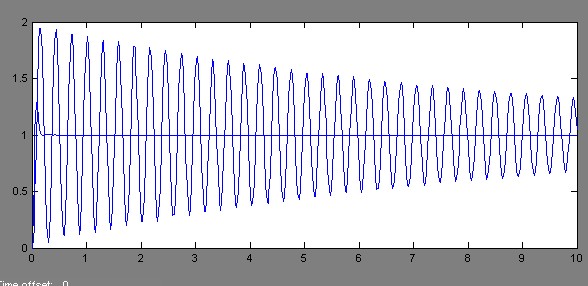
图4 Smulink仿真校正前系统阶跃响应图
4.3校正后系统的仿真图
用simulink仿真校正后系统阶跃响应的曲线如图5,由图可知,校正后系统较未校正系统的调节时间缩短,超调量减小,响应速度变快,稳定性能提高。
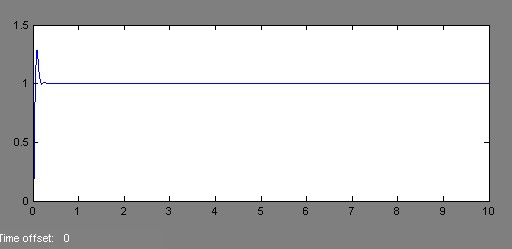
图5 Smulink仿真校正后系统阶跃响应图
5.电路模拟以及结果分析
5.1 未校正系统的模拟电路
如图6所示为未校正系统的电路模拟图。
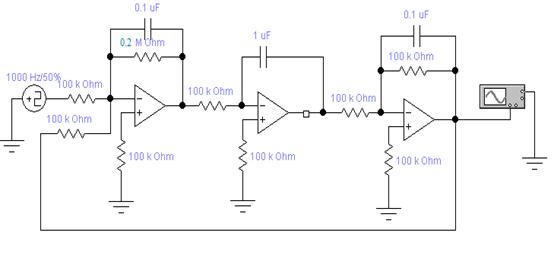
图6 未校正系统的电路模拟图
校正前系统阶跃响应曲线如图7,由图可知校正前系统是稳定的,其阶跃响应曲线是震荡衰减的。
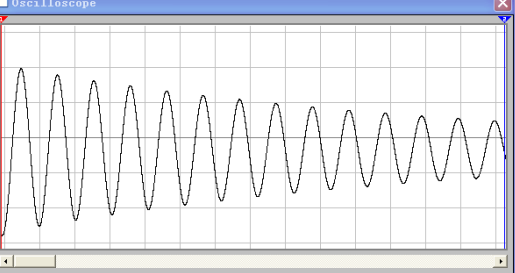
图7校正前系统的阶跃响应曲线
5.2校正后系统的硬件图
如图8所示为校正后系统的电路模拟图。
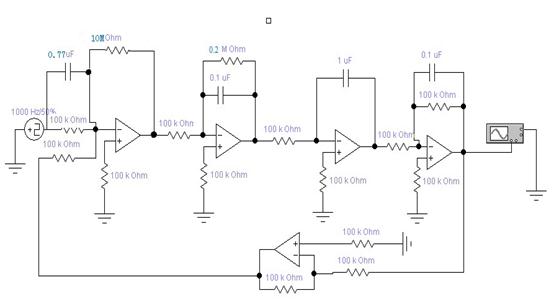
图8 校正后系统的电路模拟图
校正后系统阶跃响应曲线如图9,由图可知,校正后系统的相位裕度以及稳定性提高了,系统的响应速度比未校正系统快,这说明校正装置对系统起到一定的作用。 
图9校正后系统的阶跃响应曲线
6.思考题
(1)超前校正对改善系统性能有什么作用?什么情况下不宜采用超前校正?
答:超前校正是通过其相位超前特性来改善系统的品质,超前校正增大了系统的相位裕量和剪切频率,减小瞬态响应的超调量,提高响应的快速性;超前校正适用于稳态精度已经满足、但瞬态性能不满足要求的系统。
在有些情况下,串联超前校正的应用受到限制。例如,当未校正系统的相角在所需剪切频率附近向负相角方面急剧减小时,采用串联校正环节效果不大;或者,当需要超前相角的数量很大时,超前校正的网络的系数 值需选择很小,从而使系统的带宽过大,高频噪声能顺利通过系统。因此,这两种情况不宜采用串联超前校正。
值需选择很小,从而使系统的带宽过大,高频噪声能顺利通过系统。因此,这两种情况不宜采用串联超前校正。
(2)有没有其他形式的校正方案?
答:还有其他校正装置的连接方式: 1)基于根轨迹法的超前校正方法, 2)基于根轨迹法的超前滞后校正, 3)基于频率响应法的迟后校正,(4)根轨迹法的迟后超前校正,5)频率响应法的迟后超前校正。
(3)分析校正前后系统的阶跃响应曲线和Bode图,说明校正装置对改善系统性能的作用。
答:增加开环频率特性在剪切频率附近的正相角,从而提高了系统的相角裕度;减小对数幅频特性在幅值穿越频率上的负斜率,从而提高了系统的稳定性;提高了系统的频带宽度,从而提高了系统的响应速度; 不影响系统的稳态性能。
(4)超前校正的原理是什么?
答:用频率法进行超前校正的原理是利用超前校正装置网络的相位超前特性来增大系统的相位裕量,已达到改善系统暂态响应的目的。为此要求校正网络最大相位超前角 出现在校正后系统的剪切频率处。
出现在校正后系统的剪切频率处。
7.设计小结
经过此次的自动控制原理课程设计,我学会了如何运用Matlab这样一个具有强大功能的数学工具对一个系统进行分析和校正,并且进行仿真,从而把理论和实际相结合,得出结论。
刚接触到题目时,我自己感觉到措手不及,但是通过指导老师的讲解以及自己在网络和书本中查阅到的知识,渐渐的这种感觉也就不怎么明显了,从问题的源头来讲就是自己对于Matlab软件的不熟悉。当自己运用的次数多了之后,发现可设并没有原来自己想像的难。首先是面对一个开环的传递函数,各有其的参数和特性,可能稳定,也可能不稳定。我们需要应用串联校正装置对该系统进行改进,使之满足设计的基本要求。而在做的过程中,我们通过Matlab可以轻松的获得数据从而进行分析,相对于以前的手算方便快捷多了,通过Matlab强大的仿真功能,我们能清楚地观测到校正前后的波形,看到校正网络对于系统稳定性的作用以及校正效果。不仅仅是这些,这次课程设计我还掌握了很多电脑方面的知识,如何用simulink来仿真等等,这是我以前从未接触到的。
通过做这次自动控制原理课程设计,我对于自动控制原理这门课程也有了更一步的了解,以前只停留于理论,这次是将我所学习到的理论和实际结合起来,总的来说,让我受益匪浅,同时也要感谢指导老师的用心指导和同学的帮助,只有我一个人的力量是不能这么顺利的完成此次课设的,感谢他们!
8.参考文献
[1]滕青芳,范多旺.自动控制原理.北京:人民邮电出版社,2008
第二篇:自动控制原理课程设计报告-潘娜
一、 设计题目
设单位负反馈系统的开环传递函数为

用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:
(1) 相角裕度 ;
;
(2) 在单位斜坡输入下的稳态误差为 ;
;
(3) 系统的剪切频率小于7.5rad/s。
要求:
(1) 分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正);
(2) 详细设计(包括的图形有:校正结构图,校正前系统的Bode图,校正装置的Bode图,校正后系统的Bode图);
(3) 用MATLAB编程代码及运行结果(包括图形、运算结果);
(4) 校正前后系统的单位阶跃响应图。
二、 设计报告正文
1、设计思路
(1)按要求的稳态误差系数,求出系统的开环放大系数K。
因为题目要求在单位斜坡输入下的稳态误差为ess=0.1
所以有 ess=lim 1/ [s·G0(s)]=1/k=0.1→k=10
(2)将k值代入原函数并令s=jw,得系统的开环频率特性为
G0(jw)=10/[jw(jw+1)]
(3)截至频率Wc=100.5=3.16rad/s,
相角裕量为γ=1800+∠G(jwc)=1800-900-arctanwc=900-arctan3.16=17.970
因为需增加的相位裕量较大且在Wc附近的Gs(jw)的相角减小很快,所以选择滞后校正对系统进行校正。
利用Matalab画出校正前系统的伯德图如图一:
源代码:no=[10];
do=[1 1 0];
syso=tf(no,do);
margin(syso);
grid
运行结果:相角裕量 Pm =17.9642 截止频率 Wcp = 3.0842
(4)根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出b和T值并确定校正装置的传递函数。
(5)研究已校正系统的伯德图,检查全部性能指标是否满足要求。

图一
2、详细设计
Ⅰ、校正前的系统分析
(1)单位阶跃响应分析
源代码: G=tf([10],[1 1 0 ]);
G1=feedback(G,1);
t=0:0.01:5;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正前单位阶跃响应’);
在Matlab中运行得到单位阶跃响应图如图二
由图二可知,系统在单位阶跃输入下,开始时振荡比较大,超调量也比较大,系统的动态性能不佳。
(2)开环传递函数bode图分析
由图一可看出,相角裕量γ=17.96420 截止频率wc=3.0842rad/s。此时相角裕量不符合要求。
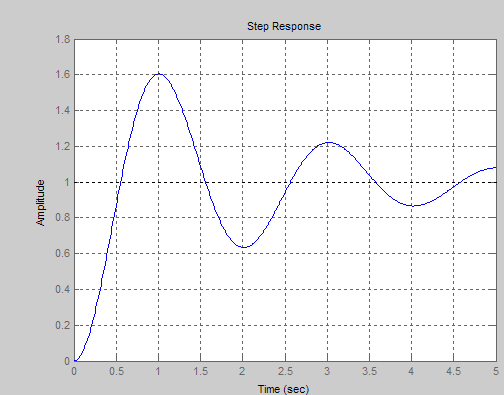
图二 校正前单位阶跃响应
Ⅱ、系统校正过程
(1) 根据相角裕量γ≥450的要求,再考虑到串接滞后校正装置的相角滞后,从未校正系统的频率特性曲线图1上,找出对应相角-1800+(450+50)=-1300处的频率wc’≈0.839rad/s。wc’将作为校正后系统的增益交界频率。
(2) 确定滞后装置的传递函数 Gc=(1+aTs)/(1+Ts)
①根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出a值。
在wc=wc’处,从未校正的对数幅频特性曲线上求得 :
20lg|G0(j wc’)| =19dB···················①
再由20lg 1/a=19.4dB 计算出a=0.107
②由 1/aT=1/10·wc’ 所以当wc’≈0.83rad/s a=0.107时,可求得
T=113s
③将所求的a值和T值代入①式得校正装置的传递函数为:
Gc(s)=(1+11s)/(1+113s)
利用Matlab画出校正装置的Bode图 如图三
源代码:G0=tf([11 1],[113 1]);
margin(G0); 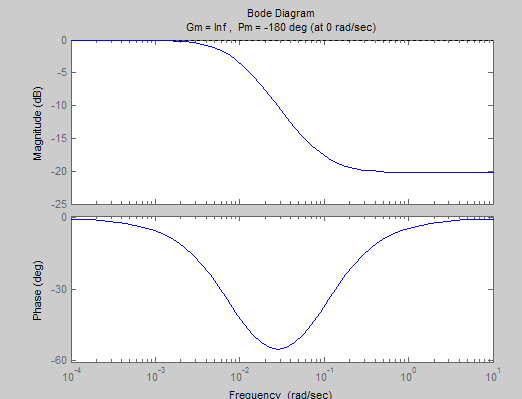
图三校正装置bode图
(3)已校正后系统的开环传递函数为 G(s)= G0(s)·Gc(s)
=10(1+11s)/[s(s+1)(1+113s)]
利用Matalab画出校后系统的伯德图如图四
源代码:
n1=10;
d1=[1 1 0]
s1=tf(n1,d1);
s2=tf([11 1],[113 1]);
s=s1*s2;
[Gm,Pm,Wcm,Wcp]=margin(s)
margin(s)
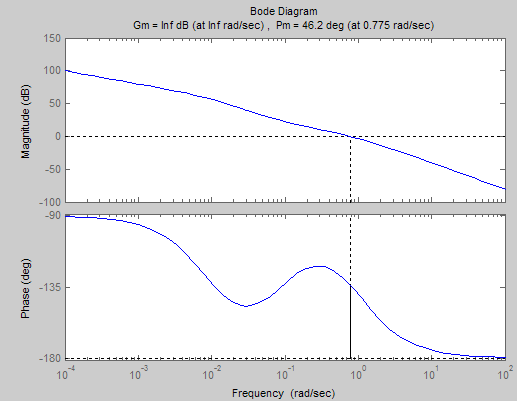
运算结果:相角裕量Pm =46.1952 截止频率 Wcp =0.7747
Ⅲ、校正后验证
(1)校正后伯德图分析
由图三可知校正后的相角裕量γ’=46.20>450 截止频率wc’’=0.775rad/s<7.5rad/s 符合设计题目的要求。
(2)校正后系统的单位阶跃响应图 图五
源代码:G=tf([110 10],[113 114 1 0]);
G1=feedback(G,1);
t=0:0.1:10;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正后单位阶跃响应’);
图四校正后bode图
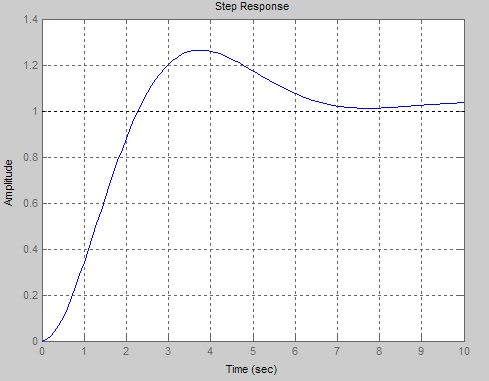
图五 校正后单位阶跃响应图
(3)将校正前后以及校正装置的伯德图放入同一个图中如图六
源代码:
G1=tf([10],[1 1 0]);
G2=tf([11 1],[113 1]);
G3=tf([110 10],[113 114 1 0]);
[gm,pm,wg,wp]=margin(G1);
bode(G1,'r--',G2,'g',G3);
grid
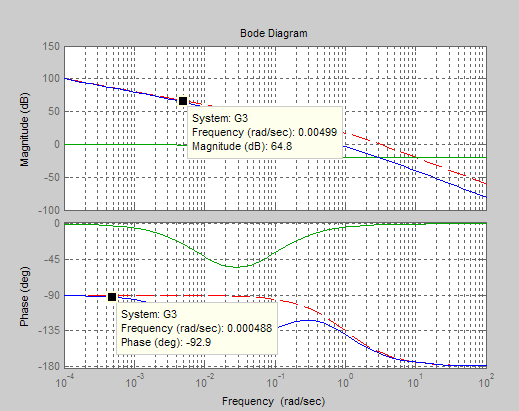
图六 校正前后和校正装置bode图
(校正前—红色 校正装置—绿色 校正后—蓝色)
由图六可看出,系统加入滞后校正装置后,在w>0.0049rad/s的频率范围内,滞后装置衰减了G(jw)的幅值,使系统的wc左移到wc’,使系统的快速性下降。