《自动控制原理》课程设计
目录
1、课程教学目的…………………………………………………3
2、课程设计内容及基本要求……………………………………3
2.1、课程设计内容………………………………………………………3
2.2、设计基本要求………………………………………………………3
3、所选设计题……………………………………………………4
4、未校正系统分析………………………………………………4
4.1、绘画开闭环零极点图………………………………………………4
4.2、绘画根轨迹,并分析随根轨迹增益变化的性能…………………6
4.3、作出单位阶跃响应,并分析性能指标……………………………7
4.4、绘出开环bode图,并分析频域性能指标 ………………………9
5、选定合适的校正方案…………………………………………10
5.1、分析…………………………………………………………………11
5.2、设计串联滞后校正网络的步骤……………………………………11
5.3、参数计算……………………………………………………………11
6、判断校正装置…………………………………………………11
7、绘画模拟电路…………………………………………………12
7.1、模拟电路设计………………………………………………………12
7.2、系统的阶跃响应曲线………………………………………………14
7.3、分析采用的校正装置的效果………………………………………15
8、总结及设计心得………………………………………………15
9、参考文献………………………………………………………15
一、课程教学目的
1、培养理论联系实际的设计思想,训练综合运用经典控制理论和相关课程知识的能力。
2、掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
3、学会使用MATLAB语言及Simulink动态仿真工具进行系统仿真与调试。
4、学会使用硬件仿真软件对系统进行模拟仿真。
5、锻炼独立思考和动手解决控制系统实际问题的能力。
二、课程设计内容及基本要求
1、课程设计内容
(1)、给出有实际背景的数学模型,分别提出不同的设计题目及设计指标要求。学生通过查阅相关资料,根据各自题目确定合理的控制方式及校正形式,完成设计。
(2)、学生首先要根据所学自动控制原理课程知识(时域分析法、频率法和根轨迹法)对系统进行性能分析。根据设计题目要求进行人工设计校正装置,初步设计出校正装置传递函数形式及参数。
(3)、利用MATLAB语言及simulink动态仿真工具,在计算机上对人工设计系统进行仿真调试,使其满足技术要求,并绘制打印出仿真框图、频率特性图及动态响应图。
(4)、确定校正装置的电路形式及电路参数。
(5)、完成设计报告。
2、设计基本要求
(1)、掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析。
(2)、根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
(3)、利用MATLAB语言及simulink动态仿真工具,在计算机上对人工设计系统进行仿真调试,使其满足技术要求,并绘制打印出仿真框图、频率特性图及动态响应图。
(4)、确定校正装置的电路形式及电路参数。
(5)、使用multsim电路设计仿真软件绘画模拟电路。分析采用的校正装置的效果。
三、所选设计题
系统的开环传递函数为: ,设计一个PID校正环节,要求系统为:
,设计一个PID校正环节,要求系统为:
(1)系统响应斜坡信号r(t)=t时,稳态误差小于等于0.01;
(2)系统的相角裕度 。
。
四、未校正系统分析
1、利用MATLAB绘画未校正系统的开环和闭环零极点图。
由稳态误差小于等于0.01 即1/k<=0.01 解得k>=100 所以选择k=100
M语句如下:
num=100;
den=conv([1 0],conv([0.1 1],[0.2 1]));
G=tf (num,den);
Gf= feedback(G,1,-1); %生成闭环传递函数
figure(1)
pzmap(G);
title('未校正系统的开环零极点分布图')
xlabel('实轴x')
ylabel('虚轴j')
figure(2)
pzmap(Gf);
title('未校正系统的闭环零极点分布图')
xlabel('实轴x')
ylabel('虚轴j')
由软件Matlab绘画系统零极点图:
未校正系统开环零极点图:

未校正系统闭环零极点图:

2、绘画根轨迹,分析未校正系统随着根轨迹增益变化的性能(稳定性、快速性)。
①M语句如下:
num=10;
den=conv([1 0],conv([0.1 1],[0.2 1]));
G=tf (num,den);
figure(3)
rlocus(G);
title('未校正系统的根轨迹图')
xlabel('实轴x')
ylabel('虚轴j')
②M语句如下:
num=100;
den=conv([1 0],conv([0.1 1],[0.2 1]));
G=tf (num,den);
figure(3)
rlocus(G);
title('未校正系统的根轨迹图')
xlabel('实轴x')
ylabel('虚轴j')
(1)、绘画根轨迹
未校正系统根轨迹图(k=10):

未校正系统根轨迹图(k=100):

(2)、根据根轨迹分析未校正系统稳定性和快速性
①、系统稳定性分析
分析:闭环传递函数的特征方程:D(s)=0.02s^3+0.3s^2+s+k
列出劳斯表:

由劳斯稳定判据有: k>0 且 0.3-0.02k>0 ,
即0<k<15时系统处于稳定状态;
又K=100>15,所以系统不稳定
②、系统快速性分析
系统的快速性要好,则闭环极点均应远离虚轴y,以便使阶跃响应中的每个分量都衰减得更快。由系统的根轨迹图可知,当系统根轨迹在s左半平面时,闭环极点距s平面上虚轴越近,阻尼角增加,ξ变小,振荡程度加剧,超调量变大,若特征根进一步靠近虚轴,衰减振荡过程变得很缓慢,系统的快速性减小。
3、编写M文件作出单位阶跃输入下的系统响应,分析系统单位阶跃响应的性能指标。
①未校正系统单位阶跃响应
M语句如下:
num=100;
den=conv([1 0],conv([0.1 1],[0.2 1]));
G=tf (num,den);
Gf= feedback(G,1,-1); %生成闭环传递函数
sys=feedback(Gf,1);
t=0:0.01:5;
step(sys,t);
xlabel('t')
ylabel('Gf')
title('未校正系统的阶跃响应曲线')
未校正系统单位阶跃响应图:

分析系统单位阶跃响应的性能指标:
由图可知,未校正系统是离散的,所以不能进行系统单位阶跃响应的性能指标
分析。
②已校正系统单位阶跃响应
M语句如下:
num=100;
den=conv([0.1 1 0],[0.2 1]);
Gs=tf(num,den);
num1=[3.7 1];
den1=[115.74 1];
Gs1=tf(num1,den1);
Gs2=series(Gs,Gs1);
sys=feedback(Gs2,1);
t=0:0.01:5;
step(sys,t);
title('已校正系统的阶跃响应曲线')
已校正系统单位阶跃响应图:

分析系统单位阶跃响应的性能指标:
由上图可知:
峰值时间tp=1.06s;
调节时间ts=3.06s;
超调量=[y(tp)—y(∞)]/y(∞)×100% =34%
且采用校正装置后系统稳定,其峰值时间和调节时间相对较小,系统反应速度较快,超调量为34%,系统的阻尼程度适中。
4、绘出系统开环传函的bode图,利用频域分析方法分析系统的频域性能指标(相角裕度和幅值裕度,开环振幅)。
M语句如下:
num=100;
den=conv([0.1 1 0],[0.2 1]);
Gs=tf(num,den);
bode(Gs);
margin(Gs);
title('系统开环传函的bode图')
未校正系统bode图:

利用频域分析方法分析系统的频域性能指标:
由图可得:校正后幅值裕量Gm= 16.5dB; 相位穿越频率wg=7.07rad/s ; 相位裕量Pm=-40.4 ° ; 幅值穿越频率wc=15.9 rad/s;开环振幅 h=60.2dB。
由此可知相位裕量Pm=-40.4 °< 40 ° 故系统不稳定。
利用频域分析方法计算:
截止频率wc的计算
|A(w)|=100/√[0.09*w^4+w^2*(1-0.02w^2)^2]=1 有wc=16 rad/s
穿越频率wg的计算
G(w)=-90-arctan0.1w-arctan0.2w 令G(w)=-180 有wg=7 rad/s
幅值裕度h的计算
h=1/|A(wg)| 有h=0.147<1
相角裕度r的计算
r=180+G(wc) 有r=-40.46<0
虽然理论值跟仿真的值基本一致,但系统不稳定,故需要加入校正环节改善系统的系统特性。
五、选定合适的校正方案
选定合适的校正方案(串联滞后/串联超前/串联滞后-超前),理论分析并计算校正环节的参数,并确定何种装置实现。
1、分析:
由于未校正系统不稳定,且截止频率较大。在这种情况下,采用串联超前校正是无效的。可以证明,用超前校正k取到100时,系统的相角裕度也不到30度,而截止频率却增加至16rad/s。
而本校正对校正后的系统的动态和静态性能(响应速度、相位裕度和稳态误差)不完全有较高要求,且本校正若用串联滞后-超前校正会使校正系统复杂,故不需要用串联滞后-超前校正装置。
对系统稳态精度要求较高,响应速度要求不高,而抗干扰性能要求较高的场合;未校正系统有满意的动态性,而稳态性能不满足要求,可用串联滞后网络来提高稳态精度,同时保持其动态特性基本不变。
故选用串联滞后校正,就可以满足需要的性能指标。
(具体参考自动控制原理 简明教程(第二版)6.3节)
2、设计串联滞后校正网络的步骤如下:
1、根据稳态误差要求,确定开环增益K=100;
2、利用已确定的开环增益,绘制未校正系统的对数频率特性 ,确定截止频率wc’、相角裕度r和幅值裕度h;
3、选择不同的wc”,计算或查出不同的r,在伯德图上绘制r(wc”) 曲线;
4、根据相角裕度r”要求,选择已校正系统的截止频率wc”;考虑滞后网络在 wc” 处会产生一定的相角滞后Ψc(wc”),因此r”= r(wc”)+Ψc(wc”);
5、确定滞后网络参数b和T:20logb+L’(wc”)=0 1/bT=(0.1-0.25) wc”;
6、校验系统的性能指标。
3、参数计算:
由r’=r-6°, r为要求的40 有r’=46°
又r’(wc)=46° 得wc=2.7 rad/s
L(wc)=29.9 20lgb+ L(wc)=0 得b=0.032
1/bT=0.1wc 得T=115.74s
故校正装置的传递函数为G’=
六、判断校正装置
绘画已校正系统的bode图,与未校正系统的bode图比较,判断校正装置是否符合性能指标要求,分析出现大误差的原因。
M语句如下:
num=100;
den=conv([0.1 1 0],[0.2 1]);
Gs=tf(num,den);
num1=[3.7 1];
den1=[115.74 1];
Gs1=tf(num1,den1);
Gs2=series(Gs,Gs1);
bode(Gs,'b-' ,Gs2,'g-');
未校正、已校正系统的bode图:
未校正bode图的曲线:上线
已校正bode图的曲线:下线

判断校正装置是否符合性能指标要求:
由上图可知校正后的相角裕度r’=40.304° 40°,所以选用的校正环节符合要求。
40°,所以选用的校正环节符合要求。
七、绘画模拟电路
根据选用的装置,使用cmultisim电路设计仿真软件(或其他硬件电路仿真软件)绘画模拟电路。求此系统的阶跃响应曲线。分析采用的校正装置的效果。
1、模拟电路设计:
(1)、未校正的模拟电路 G(s)= :
:

未校正电路图:
(2)、已校正的模拟电路 G(s)= :
:

2、系统的阶跃响应曲线
未校正的阶跃响应曲线:

校正后的阶跃响应曲线:

3、分析采用的校正装置的效果
由系统的阶跃响应曲线(未校正的阶跃响应曲线、校正后的阶跃响应曲线)可知,采用的串联滞后校正装置的效果明显,使校正后的系统得到要求且系统稳定。
八、总结及设计心得
通过这次的课程设计,再次熟悉我们所学的理论知识,同时为将理论知识运用于实际搭建了一个很好的平台;使课堂学习的理论知识联系实际,进一步掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,同时也学会使用MATLAB语言及Simulink动态仿真工具进行系统仿真与调试。
在这次课程设计过程中,遇到一些麻烦。如对某些概念印象模糊;软件的开发运用不熟悉。但通过复习书本和向同学请教来了解模糊了的概念以及其他不懂得问题;借阅基本软件指导书籍,借鉴里面的例子快速的掌握此软件的使用方法。
从课程设计的入手到最后分析,对于我们来说是个不小的挑战,要清楚的注意到每个细节是不可行的,所以遇到问题时和班上的同学一起讨论,是解决各种难题的有效方法。这次课程设计使我深深地体会团队精神的重要性。
通过这次课程设计使我懂得了理论与实际相结合是很重要的,仅有理论知识是远远不够的,只有把所学的理论知识与实践相结合起来,从理论中得出结论,才能真正为社会服务,从而提高自己的实际动手能力和独立思考的能力。在设计过程中遇到的问题很多,但这是难免的,只有发现了自己的不足之处并加以改正就可以达到我们需要的要求,不断进步。
九、参考文献
1、自动控制原理(第二版) 胡寿松 科学出版社
2、自动控制原理实验教程(硬件模拟与matlab仿真)熊晓君 机械工业出版社
3、MATLAB电子仿真与应用教程 王华 国防工业出版社
4、MATLAB程序设计教程 刘卫国 中国水利水电出版社
楼顺天.基于MATLAB的系统分析与设计.西安电子科技大学出版社.1999年
5、MATLAB入门与提高 龚剑 清华大学出版社
6、百度文库
7、 http://matlab.net.cn/Index.html
第二篇:自动控制原理课程设计报告~单位负反馈系统设计校正

目 录
一、设计题目……………………………………………………………3
二、设计目的和要求……………………………………………………3
1、设计目的………………………………………………………3
2、设计要求………………………………………………………3
三、设计总体思路………………………………………………………4
四、详细设计步骤………………………………………………………4
五、设计总结……………………………………………………………12
六、参考文献……………………………………………………………12
自动控制原理课程设计
一、设计题目:
设单位负反馈系统的开环传递函数为

用相应的频率域校正方法对系统进行校正设计,使系统满足如下动态和静态性能:
(1) 相角裕度 ;
;
(2) 在单位斜坡输入下的稳态误差 ;
;
(3) 系统的剪切频率 。
。
题目要求:
(1) 分析设计要求,说明校正的设计思路(超前校正,滞后校正或滞后-超前校正);
(2) 详细设计(包括的图形有:校正结构图,校正前系统的Bode图,校正装置的Bode图,校正后系统的Bode图);
(3) 用MATLAB编程代码及运行结果(包括图形、运算结果);
(4) 校正前后系统的单位阶跃响应图。
二、设计目的和要求
1、设计目的
(1)、通过课程设计进一步掌握自动控制原理课程的有关知识,加深对所学内容的理解,提高解决实际问题的能力。
(2)、理解在自动控制系统中对不同的系统选用不同的校正方式,以保证得到最佳的系统。
(3)、理解相角裕度,稳态误差,剪切频率等参数的含义。
(4)、学习MATLAB在自动控制中的应用,会利用MATLAB提供的函数求出所需要得到的实验结果。
(5)、从总体上把握对系统进行校正的思路,能够将理论运用于实际。
2、设计要求
(1)、能用MATLAB解复杂的自动控制理论题目。
(2)、能用MATLAB设计控制系统以满足具体的性能指标。
(3)、能灵活应用MATLAB分析系统的性能。
三、设计总体思路
(1)、根据稳态误差 的值,确定开环增益K。
的值,确定开环增益K。
(2)、利用已确定的开环增益K,确定校正前系统的传递函数,画出其bode图,从图上看出校正前系统的相位裕度 和剪切频率
和剪切频率 。
。
(3)、根据相位裕度的要求,计算出滞后校正装置的参数a和T。即得校正装置的传递函数,然后得到校正后系统的开环传递函数。
(4)、验证已校正系统的相位裕度和剪切频率。
四、详细设计步骤
1、由设计思路可知
(1)按要求的稳态误差系数,求出系统的开环放大系数K。
因为题目要求在单位斜坡输入下的稳态误差为ess <0.05
所以有 ess=lim 1/ [s·G0(s)]=1/k<0.05
k>20,
所以此次取定K=21。
(2)将k值代入原函数并令s=jw,得系统的开环频率特性为
G0(jw)=21/[jw(jw+1)]
(3)此次选择滞后校正对系统进行校正。
利用Matalab画出校正前系统的伯德图如图一:
源代码:no=[21];
do=[0.02 0.3 1 0];
syso=tf(no,do);
margin(syso);
grid
运行结果:相角裕量 Pm =﹣8.74 截止频率 Wcp = 8.32
(4)根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出b和T值并确定校正装置的传递函数。
(5)研究已校正系统的伯德图,检查全部性能指标是否满足要求。
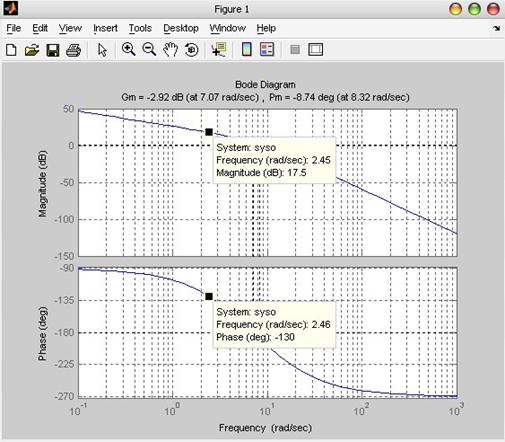
图一
2、详细设计
Ⅰ、校正前的系统分析
(1)单位阶跃响应分析
源代码: G=tf([21],[0.02 0.3 1 0 ]);
G1=feedback(G,1);
t=0:0.01:5;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正前单位阶跃响应’);
在Matlab中运行得到单位阶跃响应图如图二

图二 校正前单位阶跃响应
由图二可知,系统在单位阶跃输入下,开始时振荡比较大,超调量也比较大,系统的动态性能不佳。
(2)开环传递函数bode图分析
由图一可看出,相角裕量γ=17.50 截止频率wc=2.46rad/s。此时相角裕量不符合要求。
Ⅱ、系统校正过程
(1) 根据相角裕量γ≥450的要求,再考虑到串接滞后校正装置的相角滞后,从未校正系统的频率特性曲线图1上,找出对应相角-1800+(450+50)=-1300处的频率wc’≈2.46rad/s。wc’将作为校正后系统的增益交界频率。
(2) 确定滞后装置的传递函数 Gc=(1+aTs)/(1+Ts)
①根据滞后校正装置的最大幅值和原系统在wc’上的幅值相等条件,求出a值。
在wc=wc’处,从未校正的对数幅频特性曲线上求得 :
20lg|G0(jwc’)|=17.5dB···················①
再由20lg 1/a=17.5dB 计算出a=0.133
②由 1/(aT)=1/10·wc’所以当wc’≈2.46rad/s a=0.133时,可求得
T=30.56s
③将所求的a值和T值代入①式得校正装置的传递函数为:,
Gc(s)=(1+4.06448s)/(1+30.56s)
利用Matlab画出校正装置的Bode图 如图三
源代码:G0=tf([4.06448 1],[ 30.56 1]);
margin(G0);
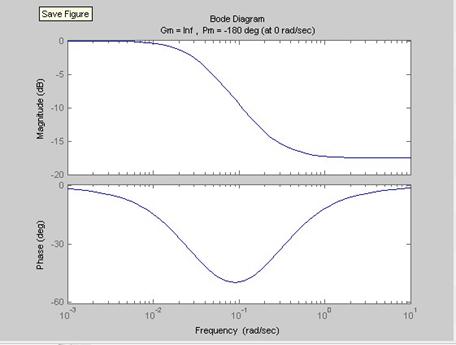
图三校正装置bode图
(3)已校正后系统的开环传递函数为
G(s)= G0(s)·Gc(s)
=21(1+4.06448s)/[s(0.1s+1)(0.2s+1)(1+30.56s)]
利用Matalab画出校后系统的伯德图如图四
源代码:
n1=21;
d1=[0.02 0.3 1 0]
s1=tf(n1,d1);
s2=tf([4.06448 1],[ 30.56 1]);
s=s1*s2;
[Gm,Pm,Wcm,Wcp]=margin(s)
margin(s)
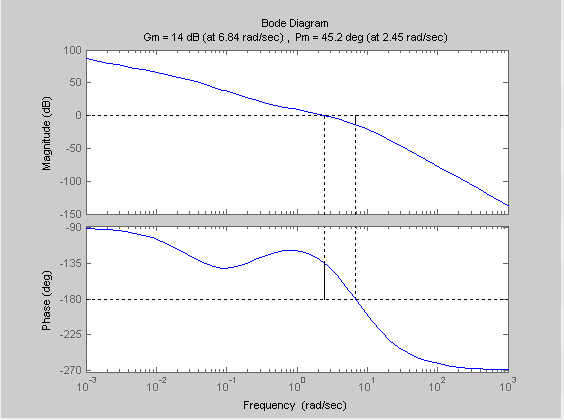
图四校正后bode图
运算结果:相角裕量Pm =45.2 截止频率 Wcp =2.45
Ⅲ、校正后验证
(1)校正后伯德图分析
由图三可知校正后的
相角裕量γ’=45.2>450
截止频率wc’’=2.45rad/s<3rad/s
符合设计题目的要求。
(2)校正后系统的单位阶跃响应图 图五
源代码:G=tf([85.35408 21 ],[0.6112 9.188 30.86 1 0]);
G1=feedback(G,1);
t=0:0.1:10;
step(G1,t);grid
xlabel(’t’);ylabel(‘c(t)’);
title(‘校正后单位阶跃响应’);
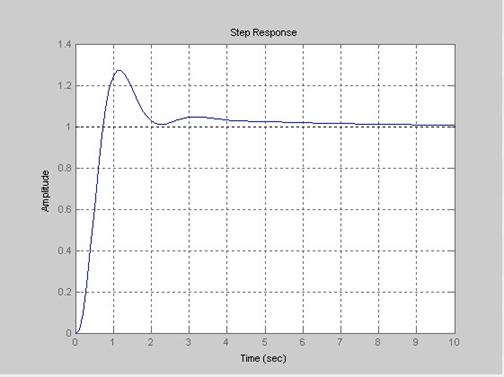
图五 校正后单位阶跃响应图
(3)将校正前后以及校正装置的伯德图放入同一个图中如图六
源代码:
G1=tf([21], [0.02 0.3 1 0]);
G2= tf([4.06448 1],[ 30.56 1]);
G3= tf([85.35408 21],[0.6112 9.188 30.86 1 0]);
[gm,pm,wg,wp]=margin(G1);
bode(G1,'r--',G2,'g',G3);
grid
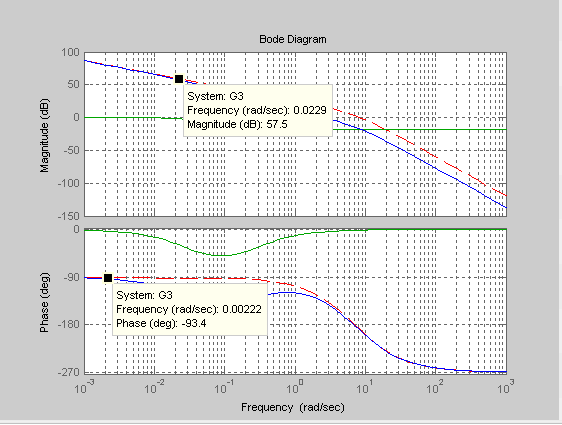
图六 校正前后和校正装置bode图
(校正前—红色 校正装置—绿色 校正后—蓝色)
由图六可看出,系统加入滞后校正装置后,在w>0.0229rad/s的频率范围内,滞后装置衰减了G(jw)的幅值,使系统的wc左移到wc’,使系统的快速性下降。
五、设计总结
本次设计是我是运用了滞后校正装置控制系统。在自动控制原理课程中校正系统有多种形式,特定的情况需要使用特定的校正装置,通过学习,我们应能够正确的将合适的校正装置应用于给定的系统,而本次课程设计三种方法都是可以的。
而本次设计中主要运用的是MATLAB,之前虽然接触过但是对它的运用不怎么熟悉,通过这次课程设计,使我对MATLAB的运用有了进一步的了解。
此次课程设计也进一步的培养了我们的动手能力,课堂学习主要注重于理论知识,而我们要将所学知识应用于实际,在此阶段,课程设计便是最好的选择了,通过课程设计,我们可以温习我们所学的理论知识,同时为将理论知识运用于实际搭建了一个很好的平台,不仅如此,通过这次的课程设计,使我知道了在当今的信息技术如此发达的世界中,我们必须运用多种渠道,去学习研究。并要很好的运用计算机和一些软件,只有这样,我们才能更好地、精确地、快速地解决问题。还有就是提高了自主解决问题的能力。
六、参考文献
[1] 杨庚辰.自动控制原理.西安电子科技大学出版社.1994.4
[2] 朱衡君.MATLAB语言及实践教程(第二版).清华大学出版社.2009.8
[3] 张静.MATLAB在控制系统中的应用.电子工业出版社.2007