重庆邮电大学移通学院
《自动控制原理》课程设计(简明)任务书
-供07级电气工程及其自动化专业本科学生用
引言:《自动控制原理》课程设计是该课程的一个重要教学 环节,塔有别于毕业设计,更不同于课堂教学。它主 要是培养学生统筹运用自动控制原理课程中所学的理 论知识,掌握反馈控制系统的基本理论和基本方法, 对工程实际系统进行完整的全面分析和综合。
设计题目:I型二阶系统的典型分析与综合设计
一. 系统说明:
该I型系统物理模拟结构如下图。
其中:R0=100KΩ; C1=C2=10-5F; R2=R0 Rf为线性滑动电位器,可调范围为:10-1R0~10R0 4 设计过程中可忽略各种干扰,比如:运算放大器的零点
漂移,环节间的负载效应,外界强力电力设备产生的电 磁干扰等。
二. 系统参量: 系统输入信号:r(t);
系统输出信号:y(t);
1
四. 设计指标:设定:输入为r(t)=a+bt(其中:a=5 b=4) 在保证静态指标KV=5(ess≤0.8)的前提下,
要求动态期望指标:σ p﹪≤8.5﹪;ts≤2sec;
五. 基本要求:
1. 建立系统数学模型——传递函数;
2. 利用频率特性法(或根轨迹方法)分析系统;
3. 利用频域特性法(或根轨迹方法)综合系统;
4. 完成系统综合前后的有源物理模拟(验证)实验;
5. 完成系统综合前后的计算机仿真(验证)实验;
六. 设计缴验:
1. 课程设计计算说明书一份;
2. 原系统组成结构原理图一张(自绘);
3. 系统分析,综合用精确BODE图(或根轨迹图)各一张;
4. 系统综合前后的模拟图各一张(附实验结果图);
5. 计算机仿真程序框图一张;
6. 计算机仿真程序清单一份(附仿真实验结果图);
7. 封面装帧成册;
2
3
目录
第一章. 系统概述.????????????????????6
1.1设计目的???????????????????????6
1.2系统原理简述?????????????????????6
1.3设计指标???????????????????????7
1.4基本要求???????????????????????7
第二章。系统建模?????????????????????7
2.1 各环节建模?????????????????????7
2.2系统建模???????????????????????9
2.3 简化结构框图????????????????????10
第三章.系统分析?????????????????????10
3.1稳定性分析??????????????????????10
3.2精度分析???????????????????????11
3.3动态分析???????????????????????11
第四章.系统综合设计???????????????????14
4.1 综合设计方案????????????????????14
第五章. 系统物理模拟??????????????????17
5.1原系统模拟图?????????????????????17
5.2速度反馈环节的模拟??????????????????17
5.3校正后系统模拟图???????????????????18
第六章.结束语??????????????????????19
6.1设计过程中的体会.???????????????????19 4
6.2致谢.???????????????????????19
6.3参考文献.?????????????????????20
5
第一章.
㈠系统概述
1.1.设计目的
?自动控制原理?课程实际是该课程的一个重要教学环节,它既
有别与毕业设计,更不同于教堂教学。它主要是培养学生统筹运用自动控制原理课程中所学的理论知识,掌握反馈控制系统的基本理论和基本方法,对工程实际系统进行完整的全面分析和综合。
1.2.系统原理简述
系统通过比例环节,存积分环节,惯性环节,实现I阶二型系统, 二阶系统结构图
结构图
以典型的单位反馈系统来分析二阶系统的单位阶跃响应。系统的响应取决于闭环系统特征方程式的根,即闭环极点。求解二阶系统的问题有二种类型,1)正面问题,给出传递函数,求性能指标。与标准式相对比,求出

, ,而后代入性能指标公式计算性能指标。2)反面问题,给定性能指标,求系统参数(如系统增益K,环节时间常数 )根据给定的传递函数与标准型式对比,找出参数与 , 的关系。其次依据给定的性能指标应用性能指标公式,计算出 , 的值。依据参数与 ,
6 的关系计算出参数
1.3.设计指标。
设定:输入为r(t)=a+bt,(其中:a=5 b=4)
在保证静态指标Kv=5(ess≤0.8)的前提下,
要求动态期望指标:бp % ≤ 8.5%; ts ≤ 2 sec;
1.4。基本要求:
① 建立系统数学模型——传递函数;
② 利用频率特性法(或根轨迹方法)分析系统;
③ 利用频率特性法(或根轨迹方法)综合系统;
④ 完成系统综合前后的有源物理模拟(验证)实验;
⑤ 完成系统综合前后的计算机仿真(验证)实验。
第二章. 系统建模.
2.1. 各环节建模型(环节结构图,输入——输出,传递函数)。系统为有源输入网络,课分为三个环节。
⑴. 比例环节
系统结构如下图(1),
结构框图如图(2),
传递函数G1=-K=-Rf
Ro=K1
7
图(1) 图(2)
(2)纯积分环节
系统结构如下图(3),
结构框图如图(4)
G2(s)=-Y2(s)=-Zf(s)1Y1(s)Zf(s)=-RO=-K21
C1ST2S=-S
图(3) 图(4)
(3)惯性环节
系统结构如下图(5),
结构框图如图(6)
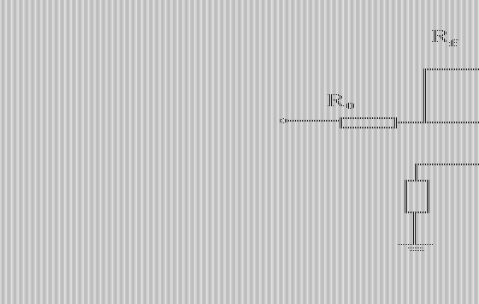
8
图5 图6 G3(s)=-R2=-K3
R=-1
2 0(1?R2C2S)T3S?1S?
2.2.系统模型
G0(s)=G1(S)G2(S)G3(S)
G0(s)=K1K2K3
T=K1
T 2S(3S?1)S(S?2)
G(S)=G0(S)
1?G 0(S)
如下图(7)整个系统结构图
图(8)为系统框图结构
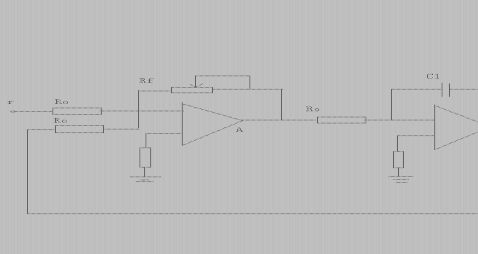
图7

9

图8
2.3. 简化结构框图,代人参数。可得如图9
图9
10
第三章. 系统分析
简化系统后,系统等价数模:
G0(s)=KP S(S?2)
3.1判断系统稳定性:稳定是首要条件。(按照基本知识,阻尼系数ξ存在,即ξ>0,且一次项系数不等于0,则可判断系统稳定)。
系统特征方程为:
S+2S+KP=0
该系统俩个极点都分布于S平面左半部分,可判定该系
统稳定。
3.2 精度分析:
该系统为I型二阶系统,输入为斜坡输入。
(1) 跟随能力:型二阶系统在斜坡输入作用下课完全跟随阶跃信 号,也可跟随速度信号,但存在一个稳定误差。
(2)稳定误差:ess
系统参考输入为斜坡函数,r(t)=a+bt。则系统的稳态误 差为 ess=esp+esv 2I
esp=0
b esv=K 0
??0s.G0(s)=又 K0=Lims?KP 2
ess=esv=b k0
11
要使ess≤0.8,则Kp≥10;
3.3 动态分析
(1) 运用根轨迹法
系统开环传递函数为 G0(s)=KP
S(S?2)
系统零点Z1,2:∞,∞ 极点:S1 =0, S2=-2 G0(S)分母阶次为n,分子阶次为m
因为n-m=2≥2.则系统闭环极点之和等于开环极点之和。
n
S重心=?Pi
i?1=-1
实轴坐标为-1,极点重心不变。根轨迹如下图10
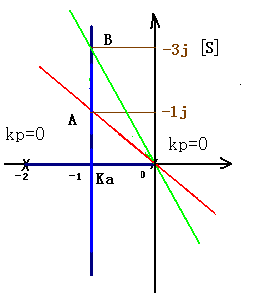
图10
(2) 分析
Kp:0→ KA 俩根均在实轴;
12
KP:KA →∞ 二阶欠阻尼系统;
选取KP的值,特征方程
S2+2S+KP=0
在A点:SA=S1,2=-1±j=-ξwn±jwn??2 Ims1,2??2
R =eS1,2?=1
→ξ=2
2=0.707
∴б-?
0%=e??2×100%=4.3%
满足бp % ≤ 8.5%。 GO(S)S1,2=1
Ts=(3~4)1
?W=(3~4) sec
n
不满足ts≤2 sec的条件另选取一个KP 值。
在B点
SB=S1,2=-1±3j=-ξwn±j3wn??2 ?
Ims1,2
R =3
eS1,2??2=3
→ξ=0.1=0.316
? ∴б-
0%=e??2×100%= 6.8%
满足 бp % ≤ 8.5% 的条件 。
ts=(3~4)1
?W=(3~4) sec
n
13
不满足ts≤2 sec的条件。 说明:该系统通过调整K1,可改变б0%,求出最优,但不能满足快速性ts。
14
第四章.
系统综合设计:
4.1 综合设计方案:通过前面的分析可知,原系统满足期望指标 бp%≤8.5%。关键是ts,要提高系统响应速度,则须采用 速度反馈。
改进之后的系统结构框图如图11所示。可简化为图
12.
图
11
图12
15
取KP等于10,则GOt(S)=10(1??s)
s(s?2)
D(S)=1+GOC(S)=0 D(S)=1+10ts
s?2s?10,
∴ Gs0τ(s)=10?
(s?1?j)(s?1?j)
图13 可知,?Wn>2,则ts=(3~4)1
?W=1.5~2 sec
n
则校正原系统:
可得G10(1??S)
0(S)=S(S?2)
则有G10?S
0τ(S)=S2?2S?10=10?S
(S?1?j3)(S?1?J3)
绘制τ-参数根轨迹:零点:0,∞。 16
极点坐标:(-1+j3),(-1-j3) 则期望根轨迹根轨迹如图14
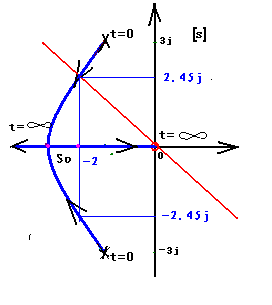
由图,通过计算:ф0
x=198.5ф*x=-198.50
Бp%≤ 8.5% ,
Б-
p%=e????2 ×100%= 8 %
可得ξ≈0.63
在图14上做等分线:
因为 S1,2=-ξwn±jwn? 所以Ims1,2
R=??1.23
eS1,2?=1.23=1
等分线与根轨迹交点:
SA1.A2=-2±j2.45 =-ξwn±jwn??
得ts=(3~4)1
?W=(1.5~2 )sec
n
图14 ≤2 sec ts17
确定满足指标τ,速度反馈
D0τ(S)=S2+2S+10+10τS=0;
S2+(2+10τ)S+10=0;
S?(2?10S)?(2?10?)2?40
1.2=2
=-2±j2.45
所以-(1+5τ)=-2
τ=0.2
第五章。
5.1 原系统的模拟图.(带入数据)如图15
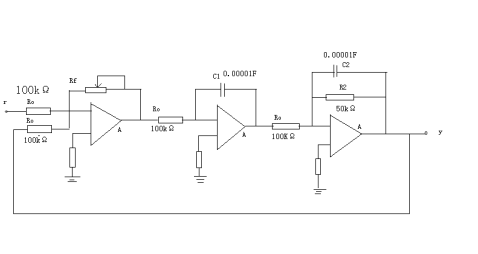
图15
5.2速度反馈环节的模拟。如图16
18
图16
5.3 校正后系统模拟图。图
17 图17
19
第六章。 结束语
6.1 设计过程的体会,心得.
初次这个课程设计,确实觉得很棘手。再加上刚放寒假回来,离上学期学的也过去了一段时间,有些遗忘。因此在着手做这个设计的时候也感到比较难,经过仔细听听老师的讲解之后,再次深刻的体会到冰冻三尺非一日之寒,一件事只有踏踏实实的从头开始,最后才会有条不紊的完成。
开始的俩天就阅读相关的书籍,切合设计的要求从书中列出需要用到的知识点,不懂的地方通过大家的讨论也逐步的弄懂了。再次让我感觉团队合作的力量是不多么强大,也加强了自己的团队合作意识。查查写写,时间很快就过去了一大半,懂得的知识也越来越多,直至最后完成整个课程设计,这几天让我非常的忙碌,也可以说是忙却有盼头,希望自己能很好的完成本次设计就足够了,这是对我们综合素质提高的一种形式,我知道我应该好好把握这些机会,认真对待。最后才会有比较让自己满意的结果,只要付出,就有收获,这是亘古不变的恒言,多读书,读好书,多动脑,勤动手,在大学积累的知识将是人生不可多得的一笔财富。
20
6.2 致谢.
一个人要想独立完成任何一件事情都是不可能的,必须依靠外部力量,在做这个设计也同样如此,完成设计与老师的教导是分不开的,在这里首先要感谢汪纪锋老师,感谢他在这一年多时间来对我的谆谆教导,也同样要感谢马冬梅老师,平时很多不懂得地方都是找的马老师,只能说:“马老师辛苦了”。还有其他自动化系的老师,你们都是我的良师益友,谢谢!团队的力量是巨大的,设计过程中,与同学们的合作也很重要,感谢我的室友,感谢我的同学,在你们的帮助下我才能顺利完成设计。再次向各位老师,同学表示衷心的感谢!
6.3 参考文献(资料)
【1】.《自动控制原理》 孟华 主编 机械工业出版社 2008 年7月出版
【2】.《自动控制原理习题集》 胡寿松 主编 北京科学出 版社 20xx年出版
【3】.《控制系统仿真与计算机辅助设计》 薛定宇 主编 北京机械工业出版社 20xx年出版
21
第二篇:自动控制原理课程设计(1)
自动控制原理课程设计要求
一、设计要求
1、设计题目:自拟
2、性能指标:给出系统应达到的性能指标,包括?、ts、?、?c等。
(注意:该部分的具体内容要根据所设计的系统进行填写)
二、设计内容
1、本课程设计选题的目的和要求
概述所做题目的意义、本人所做的工作以及系统的主要功能;
2、设计的主要内容
(1)建立被控对象数学模型,根据物理规律推导数学模型即微分方程,并对模型进行简化得到线性模型;
(2)分析被控对象特性,根据简化的数学模型得到传递函数,并分析系统的性能;(包括稳定性、动态性能、稳态精度和频域性能指标等)
(3)利用校正网络对系统进行校正,可利用MATLAB进行仿真验证。
三、课程设计报告书格式
1.封面用统一格式,写明设计题目、班级、学号、姓名,指导教师、设计时间。
2. 纸张大小:A4
四、设计报告装订顺序
1.封面(打印)
2.课程设计成绩评定表(打印)
3.设计任务书(打印)
4.摘要(200字以内)(打印)
5.目录(打印)
6.正文
说明:要求手写,如果采用MATLAB仿真方法,可全文打印,但答辩时必
须自带电脑进行简单演示。
7.结束语(可打印)
8.参考文献(可打印)
题目: 《自动控制原理》课程设计
班 级:
姓 名: 学 号:
指导教师:
时 间:
课程设计成绩评定表

自动控制原理课程设计任务书