爬杆机器人创新实践个人总结
经过一年的努力,我们小组在五个人的共同努力下,取得了预期的成果。我们提出了新型爬杆机器人设计。我们虽然按期完成了当初制定的目标。但是研究仍然存在很多不足之处,对新型爬杆机器人的实现细节研究的还不够深入。
作为项目的副组长,我的主要工作是是统筹协调安排,前期的资料收集,方案的探索,与小组成员一起拟定详细的工作计划,参与整个实验过程。经过我们小组每个人的努力,我们的项目得到了顺利的进展,按期完成了任务。
这是我第一次参与一个完整的创新实践过程,与以往一个个独立的简单实践不同,一个完整的创新实验,从最初的方案选取,资料的收集,到方案的深入,可行性分析,数据计算等等,都需要我们考虑周全,按部就班地进行。
最初确定实践方向,对于我们来说难度不大,因为在项目申请前我们已经经过了充分的沟通和与指导老师的讨论,确定要做新型爬杆机器人设计研究这样一个课题,在使用价值具有重要意义,并且给我们提供指导的韩老师在机械方面有多年的教学研究经验,能为我们提供重要的理论基础和宝贵的经验。经过对爬杆机器人相关资料的收集,之前已有的研究成果的分析,我们将研究方向定位为爬杆机器人的工作原理、实现原理以及外观设计上,试图将美学与机械结合起来等等。
往往大方向的确定是容易的,而具体实施起来才会认识到层层困难。制定实验计划和任务分配上遇到了很大的困难,由于对具体实验流程不熟悉,大家必须查看大量文献资料,了解爬杆机器人可能应用的机械原理,爬杆机器人应用这个原理是否可行,爬杆机器人的机械手资料和如何利用单片机来控制机器人的手的活动。先做哪一步,后做哪一步,从而制定一项完整的计划,往往有许多考虑不周到的地方,例如在安排每天做的方案分析时过多的考虑其概念性,而忽略了其真正的机构原理,时间安排不合理等等,等之后有了经验才慢慢改进。
实验的具体实施阶段是我们整个项目最关键,耗时最长也是遇到困难最多的阶段。大到实验的可行性分析,机械原理的可行性计算,如何才能保证爬杆机器人在上升过程中,机器人的手也能保持同一步调;小到机器人外观造型等,都需要我们有明确的计划和安排,分工合作、及时沟通,才能按时完成任务。我们在实验过程中也会经常被突如其来的问题难住,大家也经历了从开始的手忙脚乱到后来的主动思考、提前考虑,合理解决问题。
在后期的实验中,我们的主要任务是根据前面的方案,运功电脑来建模,进行虚拟的运动分析,和外观的造型。这一过程也对我们前期分析和建模能力带来了极大的考验。把3D模型建出来不难,但是如何在此基础上,进行运动分析,就很困难了,由于专业知识有限,我们不知从何入手,最后在老师和学长的指导帮助下才得以完成。
通过一年的实践、研究,我在创新能力、动手能力、团队合作能力以及专业知识等方面都有不同程度的收获。
首先,我对新型爬杆机器人又了更全面的认识。最初我们对爬杆机器人的工作原理了解不多,经过一年的研究,对于我们而言它不仅仅是报告简单描述的一些便利和益处,而是一目了然的数据,然我们更加坚信未来新型爬杆机器人的研究将更加深入,将实实在在的运用到生活中来。
其次,这一年的研究、实践过程为我们今后的进一步学习打下了基础。通过为期一年的不断学习、实验,我不仅更清楚了解了机器人最最基本的机械原理,更珍惜在团队合作下的一种奋进,学习氛围。
这次为期一年的创新实验,给我们提供了一个创新思维、思考问题、解决问题的机会。对新型爬杆机器人的研究,需要的不仅是实践,尝试,更需要创新,把新的思路、方法转化成具体的实验。对于实践过程中遇到的问题,我们就尝试了各种不同的工作原理,工作方式
的最简单化等,通过不断尝试、改进,寻找解决问题的方法。
参与这次的创新项目,通过亲身参与、实践,使我的协调能力、合作能力与沟通能力也得到了锻炼。作为项目的副负责人,我在项目阶段开始就配合组长对项目计划的安排,包括每阶段的具体工作。在一开始由于没有经验加之考虑不周到,一开始排出的计划难免出错,后面通过不断改进,随着先项目的步步发展,在大家的共同努力下,我们的项目才得以顺利的进行。团队合作沟通必不可少,除了隔一段时间讨论外我们亦会在课余时间不断交流,随时把自己的想法与其他成员分享,大家有什么创新想法我们都会讨论并尝试,希望能从中找到新的思路,新的方案。我们的项目在实验阶段有很多工作需要合作,方案构思、数据计算、计算机建模和运动的分析等这都需要我们分工合作。我们通过不断地磨合,有一开始的大家手忙脚乱,到后来逐渐适应,按部就班分工合作,工作效率明显提高。
一个项目从最初的想法到付出实践成为具体的3D电脑模型,需要经过大量的计算、设计、改进、实验,我们最初的感觉是无从下手,韩老师在设计、具体实施上给我们提供了大量宝贵的经验和意见,他之前的研究成果也给我们很大的启发。我们的项目工作量很大,时间也很紧。在我们几个成员的通过努力下,终于按期完成了预期的计划。在这里再次对韩老师和周围的同学给我们提供的指导和帮助表示感谢。
第二篇:工业机器人 实验资料总结
运动控制器基本功能实验报告
一 实验目的
1. 了解运动控制器、伺服电机控制系统组成方式;
2. 了解运动控制器基本使用方法;
3. 初步掌握应用编程方法
二 实验装置
1. 运动控制器:美国Galil DMC4080运动控制器
2. 伺服电机:日本安川SGDV 750W伺服电机
三 实验原理

四 实验方法与步骤
在计算机上安装Galil SUITE软件。参考《DMC-2143使用手册》第六、七章,在软件中输入指令,分别实现下列功能:
1. 多轴按照指定速度、位置,各自独立运动;
要求:自己设定速度、位置;
程序;说明
#A
PA2000,1500,100 A,B,C 轴运动距离分别为2000,1500,100 计数单位
SP15000,10000,5000 A,B,C 轴运动速度分别为15000,10000,5000 计数单位/sec
AC500000,500000,500000 各轴加速度为500000 计数单位/sec2
DC500000,500000,500000 各轴减速度为500000 计数单位/sec2
BGA
WT20
BGB
WT20
BGC
EN
`
2. 多轴电子齿轮同步运动;
要求:B主动,C从动,传动比为3
程序:
#A
GA,B
GR,3
GD6000
#START
PR,,10000
SP,,1000
BGB
AM
WT2000
JP#START
EN
3. 三轴铣削模拟加工应用编程;
加工图:
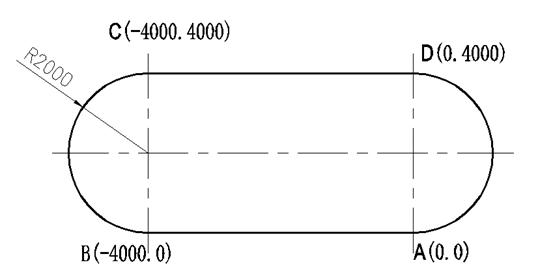
程序:说明
#A 标号
VM XY X、Y 轴圆弧插补
VP l60000,160000 矢量位置
VE 结束矢量运动
VS 200000 矢量速度
VA l544000 矢量加速度
BGS 开始运动
AMS 运动完成时
PR,,-80000 Z 轴下降
SP,,80000 Z 柚速度
BG Z 开始Z 轴运动
AM Z 等待Z 轴运动完成
CR 80000,270,-360 圆弧
VE 结束矢量运动
VS 40000 进给率
BGS 开始圆弧运动
AMS 等待圆弧运动完成
PR,,80000 抬起刀具(Z 轴)
BGZ 开始Z 轴运动(抬刀)
AMZ 等待Z 轴运动完成
PR –21600 移动X 轴
SP 20000 X 轴速度
BGX 开始X 轴运动
AMX 等待X 轴运动完成
PR,,-80000 落下Z 轴(下刀)
BG Z
AM Z
CR 80000,270,-360 第2 个圆弧切割
VE
VS 40000
BG S
AM S
PR,,80000 抬刀
BG Z
AM Z
VP –37600,-16000 X、Y 轴返回到起点
VE
VS 200000
BG S
AM S
EN