二○一二~二○一三学年第 一 学期
信息科学与工程学院
课程设计报告书
课程名称: 自动控制原理课程设计
班 级: 自动化2010级 3班
学 号: 201004134102
姓 名: 黄金龙
指导教师: 柴利
20##年1月
一.需求分析
1.设计题目
已知单位负反馈系统被控制对象的开环传递函数

用串联校正的频率域方法对系统进行串联校正设计。
2.设计要求及系统功能分析
任务一:用串联校正的频率域方法对系统进行串联校正设计,使闭环系统同时满足如下动态及静态性能指标:
(1)在单位斜坡信号 作用下,系统的稳态误差
作用下,系统的稳态误差 ;
;
(2)系统校正后,相位裕量
(3)系统校正后,幅值穿越频率
任务二:若采用数字控制器来实现任务一设计的控制器,给出数字控制器的差分方程表示或离散传递函数(Z变换)表示。仿真验证采用数字控制器后闭环系统的性能,试通过仿真确定满足任务一指标的最大的采样周期T. (注:T结果不唯一)。
二.校正前系统性能分析
校正前系统的开环传递函数为
由设计要求(1) ,得
,得 ,故有
,故有
从而系统的开环传递函数为
系统的闭环传递函数为
系统的闭环单位斜坡响应的拉氏变换为

即对 的斜坡响应对应于对
的斜坡响应对应于对 的阶跃响应。
的阶跃响应。
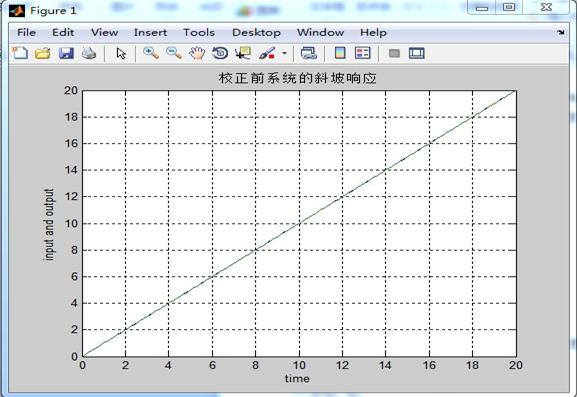
系统的时域性能
(程序参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page102)
%%系统未校正前闭环单位斜坡响应
num=[2000];
den=[1,10,2000,0];
t=[0:0.1:20];
y=step(num,den,t);
plot(t,t,t,y);
grid;
xlabel('time');
ylabel('input and output');
title('校正前系统的斜坡响应');
系统的频域性能
(程序参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page208)
%%系统未校正前伯德图
num=[200];
den=[0.1 1 0];
sys=tf(num,den);
w=logspace(-1,4,100)
bode(h,w);
grid;
[Gm,pm,wcp,wcg]=margin(sys);
Gmdb=20*log10(Gm);
[Gmdb,pm,wcp,wcg]

得到系统的稳态裕度:增益裕度gm、相位裕度pm、相角穿越频率wcg、幅值穿越频率wcp

由结果知:相位裕度
幅值穿越频率
不符合系统的性能指标要求,因此需要进行校正,根据题目要求,采用串联超前校正。
三.参数计算及校正环节设计
根据题目要求及未校正系统的性能分析知,可以用串联超前校正,具体设计步骤如下(此部分内容参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page229)
(1)根据给定的系统稳态性能指标,确定系统开环增益K=200;
(2)绘制在确定的K值下系统的伯德图,并计算其相角裕度 ;
;
(3)根据给定的相角裕度,计算所需要的相角超前量 ,即
,即  ,式中
,式中 ,从而
,从而 ;
;
(4)令超前校正装置的最大超前角 ,按下式计算网络的系数
,按下式计算网络的系数 值:
值: 
(5)将校正网络在 处的增益定为
处的增益定为 ,同时确定未校正系统伯德曲线上增益为
,同时确定未校正系统伯德曲线上增益为 处的频率,该频率即为校正后系统的剪切频率
处的频率,该频率即为校正后系统的剪切频率 ;
;
计算如下:
未校正系统的剪切频率为 ,由上述可知
,由上述可知
 或
或 
于是 
(6)确定超前校正装置的交接频率


(7)画出校正后系统的伯德图,进行相关验算
经过超前校正后,系统开环传递函数为
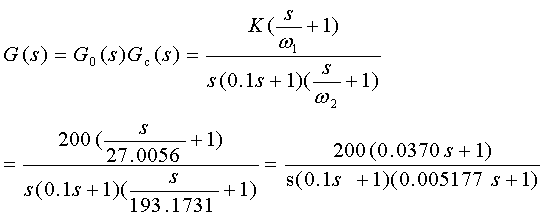
校正后系统的伯德图(程序参见《自动控制原理(第二版)》(吴怀宇、廖家平主编)Page208)
%%系统校正后伯德图
num=[7.4059 200];
den=conv([0.1 1 0],[0.005177 1]);
sys=tf(num,den);
w=logspace(-1,4,100)
bode(h,w);
grid;
[Gm,pm,wcp,wcg]=margin(sys);
Gmdb=20*log10(Gm);
[Gmdb,pm,wcp,wcg]
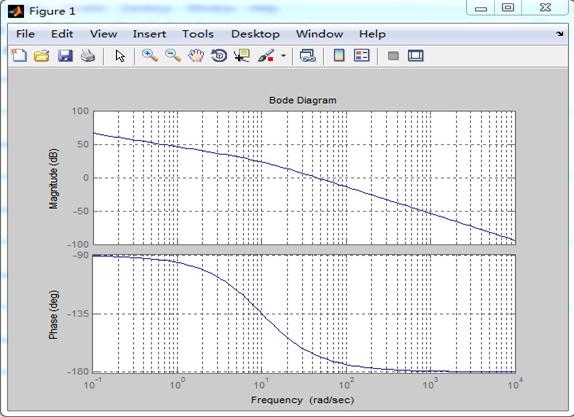
得到系统的稳态裕度:增益裕度gm、相位裕度pm、相角穿越频率wcg、幅值穿越频率wcp

由结果知:相位裕度
幅值穿越频率
满足性能指标,故校正可行。
四.利用MATLAB进行仿真检验
(此部分内容参见《MATLAB实用教程(第2版)》(郑阿奇主编)第七章)
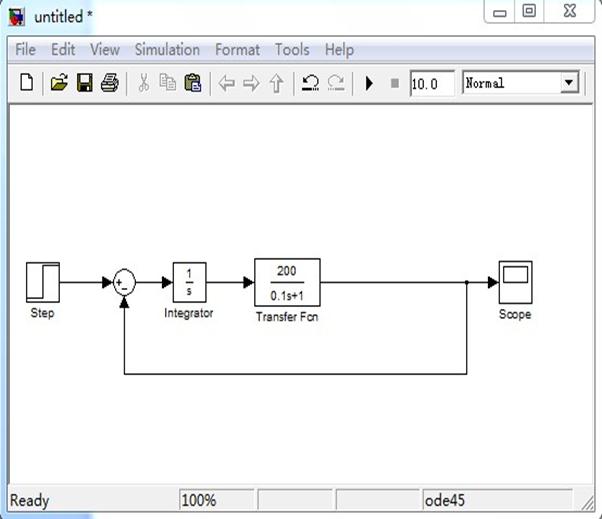
1.校正前
(1)系统结构
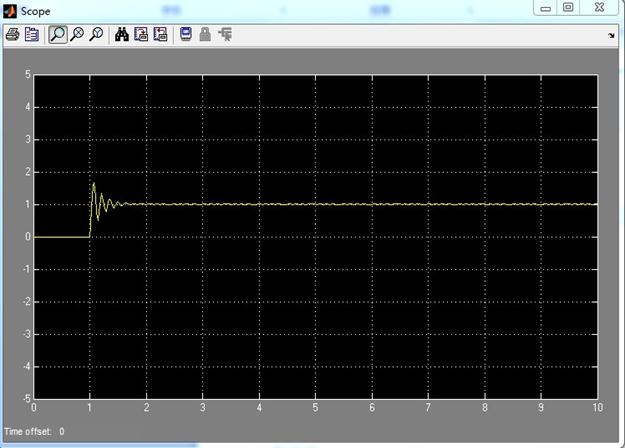
(2)系统单位阶跃响应
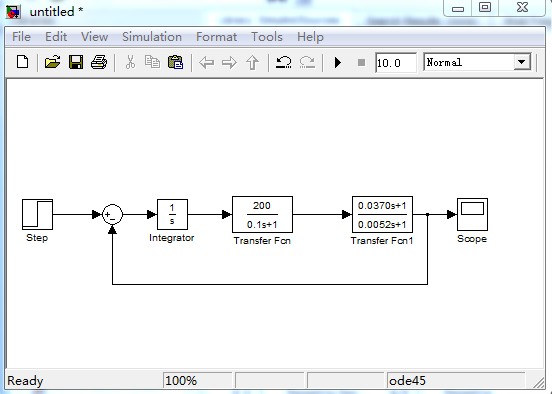
2.校正后
(1)系统结构
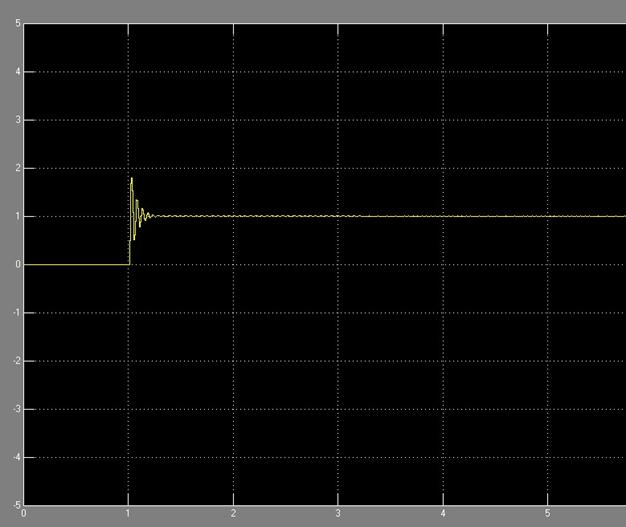
(2)系统单位阶跃响应
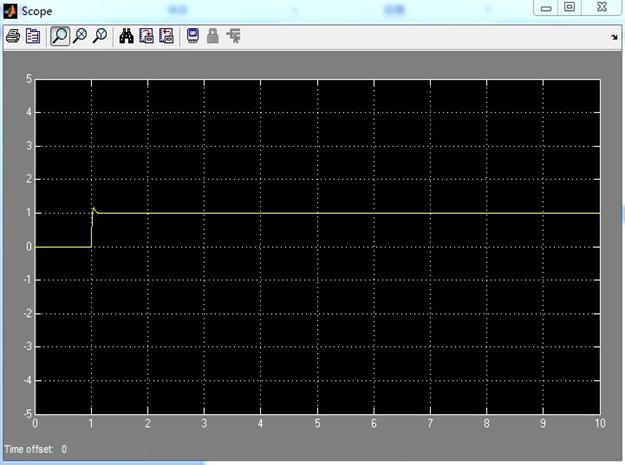
由校正前后系统的单位阶跃响应曲线可知,当加入串联超前校正环节后,系统的稳态性能和暂态性能均得到提升,校正成功。
五.数字控制器
(此部分内容参见《MATLAB实用教程(第2版)》(郑阿奇主编)第六章)
1.第一次尝试
(1)任务一设计的控制器为 ,利用MATLAB中零阶保持器法求出该控制器的Z变换。一般设置采样周期为最小时间常数的
,利用MATLAB中零阶保持器法求出该控制器的Z变换。一般设置采样周期为最小时间常数的 ,故采样周期为
,故采样周期为 。
。
%%求解控制器的Z变换
num=[0.0370 1];
den=[0.0052 1];
G=tf(num,den);
Gd=c2d(G,0.01)
命令窗口得到变换后的结果
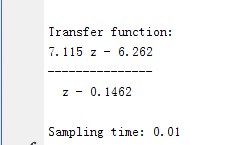
得该控制器的Z变换为 ;
;
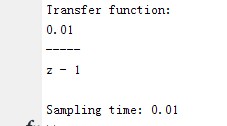
(2)同理得到未校正系统传递函数的Z变换:
%%求解未校正系统积分环节Z变换
num=[1];
den=[1 0];
G1=tf(num,den);
Gd1=c2d(G1,0.01)
结果如下:
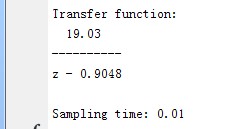
%%求解未校正系统惯性环节Z变换
num=[200];
den=[0.1 1];
G2=tf(num,den);
Gd2=c2d(G2,0.01)
结果如下:
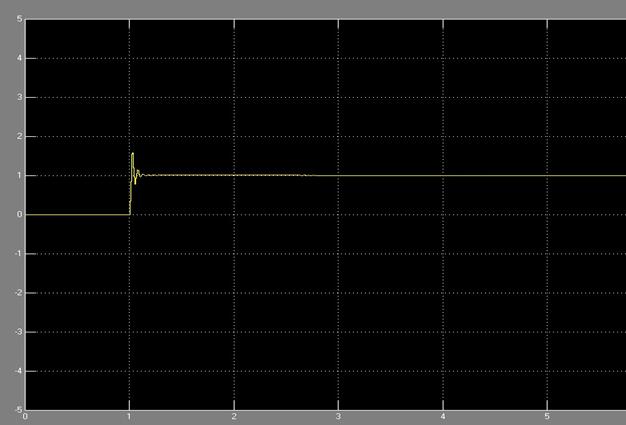
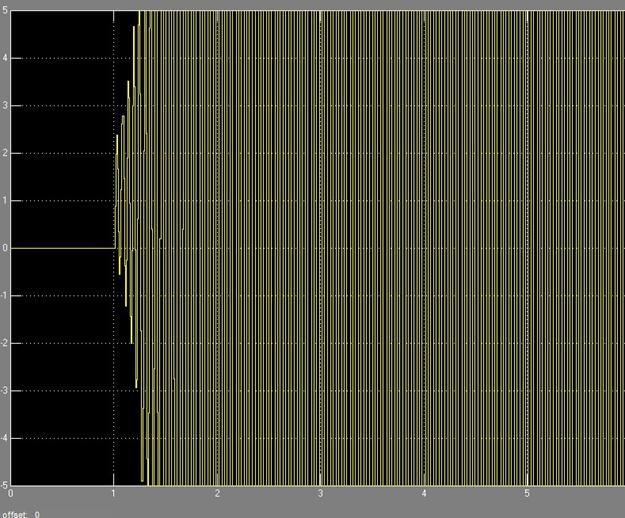
(3)校正后进行离散仿真
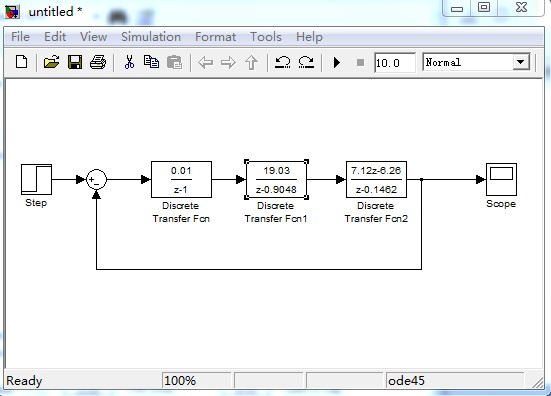
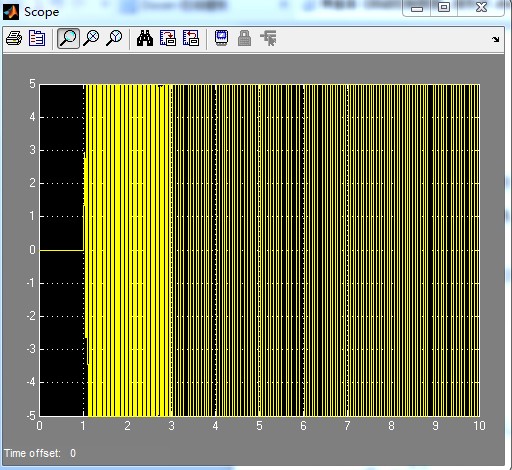
由图可知,采样周期过大。
 2.第二次尝试
2.第二次尝试
同第一次尝试,此次将积分环节、惯性环节、校正环节的采样周期均设置为 ,由此得:
,由此得:
积分环节 惯性环节
惯性环节 校正环节
校正环节
成功。由第一次和第二次尝试可知,采样周期可能在0.005s~0.01s之间。
3.第三次尝试
令 ,重复以上步骤
,重复以上步骤
积分环节 惯性环节
惯性环节 校正环节
校正环节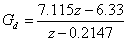
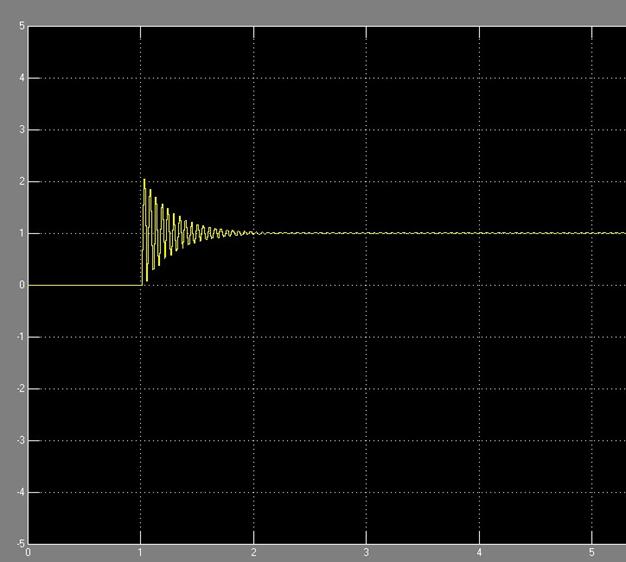
仿真结果如下:
失败,由第二次和第三次尝试可知,采样周期可能在0.005s~0.008s之间。
4.第四次尝试
令 ,同上
,同上
积分环节 惯性环节
惯性环节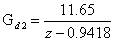 校正环节
校正环节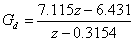
仿真结果如下:
成功,由上几次尝试可知,最大采样时间应在0.006s~0.008s之间。
5.第五次尝试
令 ,同上
,同上
积分环节 惯性环节
惯性环节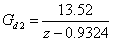 校正环节
校正环节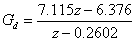
仿真结果如下:
由以上尝试可知,最大采样周期约为0.007s.
结论:校正后最大采样周期近似为
六.参考文献
1.吴怀宇、廖家平《自动控制原理(第二版)》华中科技大学出版社
2.郑阿奇《MATLAB实用教程(第2版)》电子工业出版社
3.胡寿松《自动控制原理》科学出版社
七.心得体会
此次课程设计花费了自己很长的时间去做,自己付出了很多的时间和精力,虽然结果不一定做得够好,但是自己在此期间确实学习到了很多的知识和技能,自我感觉收获还是蛮大的。
在设计校正装置时,由于自己对一些基本知识没有掌握牢固,导致自己在设计过程中频频出错,比如说校正后剪切频率的计算就是因为理解不透,导致自己在后面的设计过程中出错;还有由于自己MATLAB指令掌握不熟,导致自己在编写程序期间总得不到自己期望的结果
在对离散系统进行仿真求解最大采样周期时,开始时由于自己对题目的理解不是太清楚,导致自己白花费了很多时间去做和题目不相关的事。
总之,经过此次课程设计,我对《自动控制原理》的相关知识的理解及其应用又更深了一层,尤其是对《MATLAB》的强大功能有了更进一步的了解,同时也警醒自己,自己掌握的知识还远远不够,还需要自己持之以恒的努力。
最后想对柴老师说句心里话:“虽然我不是太适应您授课的风格,但我一直很欣赏也很钦佩您对学生尽职尽责的态度;虽然我成绩不好,但经过此次课程设计,我对《自动控制原理》的兴趣变浓厚了。‘经师易遇,人师难求’我想是对您最中肯的评价!”
第二篇:-正文自动控制原理课程设计
前言
一般来说,随动控制系统要求有好的跟随性能。位置随动系统是非常典型的随动系统,是个位置闭环反馈系统,系统中具有位置给定,位置检测和位置反馈环节,这种系统的各种参数都是连续变化的模拟量,其位置检测可用电位器、自整角机、旋转变压器、感应同步器等。位置随动系统中的给只给定量是经常变动的,是一个随机量,并要求输出量准确跟随给定量的变化,输出响应具有快速性、灵活性和准确性。为了保证系统的稳定性,并具有良好的动态性能,必须设有校正装置,如在正向通道中设置串联校正装并联校正装置等,为了提高位置随动系统的控制精度,还需要增加系统的开环放大倍数或在系统中增加积分环节等。
1 设计原理及性能指标要求
1.1设计原理
要使角位移的输出量能够跟随给定角位移的输入量的变化而变化,达到位置随动的目的,可以通过位置的检测,反馈,校正等环节,形成位置闭环反馈系统。系统中具有位置给定,位置检测和位置反馈环节,这种系统的各种参数都是连续变化的模拟量,其位置检测可用电位器、自整角机、旋转变压器、感应同步器等。
1.2设计性能指标
根据现实需要,位置随动系统主要技术指标如下:
(1)误差系数
(2)单位阶跃响应的超调量
(3)单位阶跃响应的调节时间
(4)幅值裕度
通过对数学模型进行系统分析和动态校正,最后设计出一个符合稳定性、准确性和快速性要求的自整角机随动控制系统。
2 控制方案及系统组成原理方框图
2.1控制方案
要使角位移的输出量能够跟随给定角位移的输入量的变化而变化,达到位置随动的目的,可以通过位置的检测,反馈,校正等环节,形成位置闭环反馈系统。系统中具有位置给定,位置检测和位置反馈环节,这种系统的各种参数都是连续变化的模拟量,其位置检测可用电位器、自整角机、旋转变压器、感应同步器等。
1、自整角机
用作测量机械转角(角位移)的传感器,是位置检测元件。随动系统通过一对自整角机来反映指令轴转角、执行轴转角和它们之间的角差,与指令轴相连的自整角机成为发送机,与执行轴相连的成为接收机。
2、相敏放大器
用作将自整角机测角电路输出的角差电动势整流成直流信号,该信号不仅反映角差的大小,而且要反映角差的极性。
3、可逆功率放大器
用作对控制信号进行功率放大,以便驱动执行机构,实现控制系统的正反转控制。
4、伺服电动机
是随动系统执行机构的主要组成部分,对系统精度和快速性影响较大,要求伺服电动机转动惯量小,过载转矩大以提高系统的快速性。
5、校正电路
通过校正,使系统的稳定性、准确性、快速性得到改善,以达到要求。
2.2系统组成原理方框图
由控制方案,可得未校正前系统组成结构框图如下图所示:
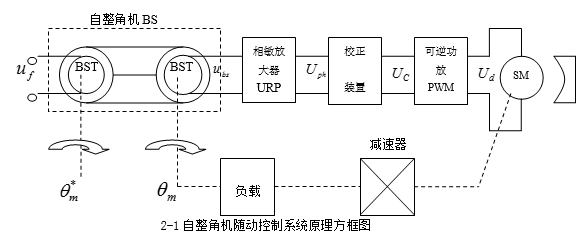
2-1自整角机随动控制系统原理方框图
3 系统数学模型及传递函数
3.1各环节传递函数
1.自整角机环节
自整角机的输入量是失调角,输入量是 。
。 虽然是随时间变化的量,但是由于后续环节接有相敏整流器,交流电被整流成直流电,
虽然是随时间变化的量,但是由于后续环节接有相敏整流器,交流电被整流成直流电, 随时间变化的因素对后续电路未产生影响,所以可以将自整角机的输出量看成是
随时间变化的因素对后续电路未产生影响,所以可以将自整角机的输出量看成是 .一般地,当
.一般地,当 时,可近似认为
时,可近似认为 ,则自整角机环节的传递函数为
,则自整角机环节的传递函数为
相敏整流环节
相敏整流环节的输入量为自整角机的输出量 ,输出量为相敏整流电压
,输出量为相敏整流电压 。该环节的滤波电路不仅对时间变量引起的电压波动有绿波作用,对由失调角的改变引起的电压波动也能够滤波。由于滤波环节只有一个储能元件,由
。该环节的滤波电路不仅对时间变量引起的电压波动有绿波作用,对由失调角的改变引起的电压波动也能够滤波。由于滤波环节只有一个储能元件,由 引起
引起 的变化是一阶惯性环节的响应,所以相敏整流环节的传递函数可由一阶惯性环节来描述,即
的变化是一阶惯性环节的响应,所以相敏整流环节的传递函数可由一阶惯性环节来描述,即

式中, 为相敏整流放大器环节的放大倍数,
为相敏整流放大器环节的放大倍数, 为阻容滤波时间常数。
为阻容滤波时间常数。
可逆功率放大器环节
PWM可你功率放大器的输入量是PWM控制电路的控制电压 ,输出量是电动机的端电压
,输出量是电动机的端电压 。由于控制信号改变时,功率器件需经过一点延时才能体现出来,因而功率放大环节可以近似为一个小惯性环节,传递函数为
。由于控制信号改变时,功率器件需经过一点延时才能体现出来,因而功率放大环节可以近似为一个小惯性环节,传递函数为
式中, 为功率放大环节的放大倍数,
为功率放大环节的放大倍数, 为延迟时间常数。
为延迟时间常数。
执行电动机环节
采用直流伺服电动机作为执行电动机,该环节的传递函数为
由于电动机的电磁时间常数比机电时间常数小一个数量级,可将电动机的传递函数近似为

减速机构环节
减速机构的输入量是电动机的转速n(单位是r/min),输出量是拖动负载旋转的角度(单位是度)。输入输出的关系满足


取零初始条件下的拉普拉斯变换,得到减速机构的传递函数为
式中, 为减速机构环节的放大系数。可见,减速机构将转速变换为转角,是个积环节。
为减速机构环节的放大系数。可见,减速机构将转速变换为转角,是个积环节。
采用串联校正时,校正装置可串接于乡民整流放大器与PWM控制电路之间。系统的动态结构图如图所示。图中, 为校正装置的传递函数。
为校正装置的传递函数。
3.2系统的动态结构图

图3-1位置随动系统动态结构图
3.3系统的开环传递函数
式中,
4 系统稳态分析
4.1系统的稳态分析
位置随动系统稳定运行时,希望输出量能够准确地跟踪输入量,稳态误差却小越好。而在形成随动控制系统误差的诸多因素中,有些属于原理性误差,如系统结构和参数以及给定输入量引起的误差可以通过系统的校正设计加以抑制或消除,而有些属于非原理性误差,例如,检测误差和给定装置的误差靠校正是无法消除的,需要在设计时选用精密元件来加以限制。
检测误差
检测误差是由检测元件产生的,误差的大小取决于检测元件的精度。位置随动控制系统常用的检测元件有自整角机、旋转变压器、感应同步器、光电编码盘等,它们均有一定的准确度等级。各类检测元件也有准确度分级。不同检测元件的误差范围如表4-1所示(表中N指光电编码盘的栅缝数)
表4-1几种检测元件的误差范围

原理误差
原理误差是由系统结构和参数以及输入函数决定的稳态误差。图3-1所示位置随动系统的故有开环传递函数为
式中,
校正后系统的开环传递函数为

式中, 为位置调节器的传递函数。
为位置调节器的传递函数。
由自动控制原理知:
选择比例调节器,则校正后的开环传递函数仍是I型系统,Ⅰ型系统只对位置输入信号是无静差的,对于速度输入能够跟踪,但有偏差,其偏差大小与系统的开环增益K成正比,并且由于积分环节位于系统的输出端,在积分环节之前,任何部位的阶跃扰动都将产生稳态误差,Ⅰ型系统不能够在加速度输入下工作。
Ⅱ型系统对位置输入和速度输入都是无差的,对于加速度输入也能跟踪,但有稳态误差,偏差大小与系统的开环增益成正比。与Ⅰ型系统相比,Ⅱ型系统比较理想,其稳态跟踪精度优于Ⅰ型系统。若设计成Ⅱ型系统,即要求位置调节器具有积分功能,一般选 为PI(或滞后网络)或PID(或滞后超前网络)型调节器,这类调节器传递函数的坟墓含有一个S的独立因子(或将大惯性环节近似为积分环节产生一个s独立因子)。按这样的传递函数设计系统,可使调节器后面前向通道中恒值扰动的稳态误差为0。
为PI(或滞后网络)或PID(或滞后超前网络)型调节器,这类调节器传递函数的坟墓含有一个S的独立因子(或将大惯性环节近似为积分环节产生一个s独立因子)。按这样的传递函数设计系统,可使调节器后面前向通道中恒值扰动的稳态误差为0。
在有负载扰动时,负载扰动使Ⅰ型系统产生稳态误差,误差大小与负载扰动作用点以前的增益K成正比。而对型系统不产生稳态误差。
从上述分析可以看出,Ⅱ型系统的跟踪能力和抗扰能力均比型系统优越。因此采用Ⅱ型系统的结构比较合理。
5 系统的动态校正
带入具体数值后系统的开环传递函数为:


5.1绘出校正前的系统频率特性曲线
绘出校正前的系统频率特性曲线如图5-1所示.由图知系统的性能指标未复合要求。

图5-1系统校正前和校正后的频率特性曲线
根据性能指标要求,可以采用串联综合校正
5.2串联综合校正
先绘系统期望特性曲线:
1)期望特性曲线的低频段。低频段绘于图5.1,起延长线在 处于横轴相交,且在
处于横轴相交,且在 时,
时,
2)期望特性的中频段。首先,将给定的时域指标 ,
, 换算为相应的频域指标
换算为相应的频域指标 ,H及
,H及 。
。
由经验公式 
解出 ;
;
再由经验公式  ,
,
求得 ,为留有余地,选相角裕度要求值
,为留有余地,选相角裕度要求值
再由 和
和
 知,中频区宽度应取
知,中频区宽度应取
最后由经验公式 ,
, 
解得 ,取期望特性的截止频率
,取期望特性的截止频率 。
。
其次,在图上,过 作斜率为
作斜率为 直线,其上下限角频率
直线,其上下限角频率 及
及 按
按
 及
及
求得; ,
, .初选
.初选 ,即
,即 ,以及
,以及 ,此时中频区宽度
,此时中频区宽度 ,大于要求值。
,大于要求值。
3)期望特性低、中频段的衔接频段。在图中,找出中频段与过 的横轴垂线的交点,过该交点作斜率为
的横轴垂线的交点,过该交点作斜率为 直线,交低频段于
直线,交低频段于 ,从而完成衔接频段设计。
,从而完成衔接频段设计。
4)期望特性的高频段。根据 及
及 的要求,在图上绘上不可变部分的幅频特性
的要求,在图上绘上不可变部分的幅频特性 ,知其高频段斜率为
,知其高频段斜率为 ~
~ ,表明待校正系统具有良好的抑制高频噪声的能力,故可使其期望特性的高频段与
,表明待校正系统具有良好的抑制高频噪声的能力,故可使其期望特性的高频段与 的高频段相同。
的高频段相同。
5)期望特性中、高频段的衔接频段。在图中,找出过 的横轴垂线与期望中频率的交点,通过该点作斜率为
的横轴垂线与期望中频率的交点,通过该点作斜率为 直线并与期望特性的高频段相交,交点对应的频率
直线并与期望特性的高频段相交,交点对应的频率 是期望特性从低频到高频的第四个交接频率,从而完成中、高频段之间的衔接频段设计。期望特性的第五个交接频率
是期望特性从低频到高频的第四个交接频率,从而完成中、高频段之间的衔接频段设计。期望特性的第五个交接频率 。
。
通过期望特性进行的综合串联校正,显然满足系统性能指标的要求。
由期望特性曲线可得校正后系统的开环传递函数为:

由 及图5-2,可得串联校正装置对应开环传递函数为:
及图5-2,可得串联校正装置对应开环传递函数为:

通过以上校正,经验证,系统的性能指标完全达到要求。
总 结
根据被控对象及给定的技术指标要求设计自动控制系统,需要进行大量的分析计算。设计中需要考虑的问题是多方面的,既要保证所设计的系统有良好的性能满足给定技术指标的要求;又要照顾到便于加工,经济性好,可靠性高。在设计过程中,既要有理论指导,也要重视实践经验,往往还要配合许多局部和整体的实验。
当被控对象给定后,按照被控对象的工作条件,被控信号具有的最大速度和加速度要求,可以初步选定执行元件的型式、特性和参数。然后,根据测量精度、抗扰能力、被测信号的物理性质、测量过程中的惯性及线性度等因素,选择合适的测量变送元件。在此基础上,设计增益可调的前置放大器与功率放大器。这些初步选定的元件及被控对象,构成系统中不可变部分。设计控制系统大的目的,是将构成控制器的各元件与被控对象适当组合起来,使之满足表征控制精度、阻尼程度和响应速度的性能指标要求。如果通过调整放大器增益后仍不能全面满足设计要求的性能指标,就需要在系统中增加一些参数及特性可按需要改变的校正装置,使系统性能全面满足设计要求。
设计体会
通过这次课程设计,让我了解了控制系统设计的一般方法,也让我了解了有关随动系统的原理与设计理念,巩固了自己所学的知识,加深了自己对理论与实际相结合的理解,深刻体会到要把书本上的知识运用到实际中去,这样才能在实践中才能提高自己,使自己能够融会贯通,把自己和社会联系到一起。
在做课程设计的过程中,我深深地感受到了自己所学到知识的有限,明白了只学好课本上的知识是不够的,要通过图书馆和互联网等各种渠道来扩充自己的知识。在实验过程中我们曾经遇到过问题。
从这次课程设计中我学习到了如何对待遇到的困难,进一步培养了自己一丝不苟的科学态度和不厌其烦的耐心。在实验的过程中我和其它同学一起探讨,我们互相讨论互相合作,使得我课程设计得以顺利完成,体会到了合作的力量。这次课程设计的体会对我以后的学习和工作有帮助作用,衷心心感谢老师在设计过程中给我们的谆谆教导;衷心感谢学校给我们提供这次机会。
参考文献
[1]任彦硕,赵一丁,张家生.自动控制系统[M].北京:北京邮电大学出版社,2006.
[2]刘建昌.自动控制系统[M].第2版.北京:冶金工业出版社.2001.
[3]John J.D’azzo ,Constantine H.Houpis. Linear Control System Analysis and Design [M]. Fourth Editian. New York:McGraw-Hill.1995.
[4] 夏小华,高为柄,程勉,(等).非线性控制系统[M].第2版.北京:科学出版社,2004.
[5] D. Dubois and H. Prade. Fuzzy Sets and Systems: Theory and Applications [M].New York: Academic Press, 2002.
[6] 蔡幸生.非线性控制系统的发展[J].自动化学报,2003,17(4):513~523.
[7] 夏小华,高为柄.稳定设计中的分解和参数化方法[Z].全国控制与决策会议,黄山,2005.