线性系统串联校正
一·实验目的
1.熟悉串联校正装置对线性系统稳定性和动态特性的影响。
2.掌握串联校正装置的设计方法和参数调试技术。
二·实验要求
1.观测未校正系统的稳定性和动态特性。
2.按动态特性要求设计串联校正装置。
3.观测加串联校正装置后系统的稳定性和动态特性,并观测校正装置参数改变对系统性能的影响。
4.对线性系统串联校正进行计算机仿真研究,并对电路模拟与数字仿真结果进行比较研究。
三·实验原理
①设计并连接一加串联校正后的二阶闭环系统的模拟电路,可参阅本实验附录的图4.4.4,利用实验箱上的U9、U14、U11、U15和U8单元连成
②通过对该系统阶跃响应的观察,来完成对其稳定性和动态特性的研究,如何利用实验设备观测阶跃特性的具体操作方法,可参阅“实验一”的实验步骤2。
四·实验所用仪器
PC微机(含实验系统上位机软件)、ACT-I实验箱、USB2.0通讯线
五·实验步骤和方法
1.观测未校正系统的稳定性和动态特性。
2.按动态特性要求设计串联校正装置。
3.观测加串联校正装置后系统的稳定性和动态特性,并观测校正装置参数改变对系统性能的影响。
4.对线性系统串联校正进行计算机仿真研究,并对电路模拟与数字仿真结果进行比较研究。
具体步骤:
1.利用实验设备,设计并连接一未加校正的二阶闭环系统的模拟电路,完成该系统的稳定性和动态特性观测。提示:
①设计并连接一未加校正的二阶闭环系统的模拟电路,可参阅本实验附录的图4.1.1和图4.1.2,利用实验箱上的U9、U11、U15和U8单元连成。
②通过对该系统阶跃响应的观察,来完成对其稳定性和动态特性的研究,如何利用实验设备观测阶跃特性的具体操作方法,可参阅实验一的实验步骤2。
2.参阅本实验的附录,按校正目标要求设计串联校正装置传递函数和模拟电路。
3.利用实验设备,设计并连接一加串联校正后的二阶闭环系统的模拟电路,完成该系统的稳定性和动态特性观测。提示:
①设计并连接一加串联校正后的二阶闭环系统的模拟电路,可参阅本实验附录的图4.4.4,利用实验箱上的U9、U14、U11、U15和U8单元连成
②通过对该系统阶跃响应的观察,来完成对其稳定性和动态特性的研究,如何利用实验设备观测阶跃特性的具体操作方法,可参阅“实验一”的实验步骤2。
4.改变串联校正装置的参数,对加校正后的二阶闭环系统进行调试,使其性能指标满足预定要求。提示:
 5.分析实验结果,完成实验报告。
5.分析实验结果,完成实验报告。
附录:
1.方块图和模拟电路
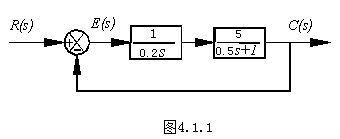
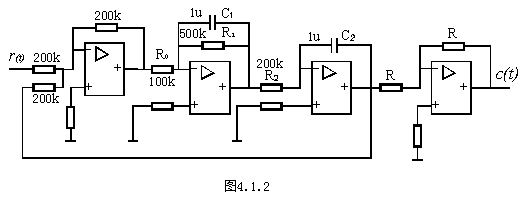
实验用未加校正二阶闭环系统的方块图和模拟电路,分别如图4.1.1和图4.1.2所示:
其开环传递函数为: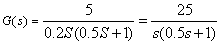
其闭环传递函数为:

式中 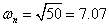 ,
, ,
,
故未加校正时系统超调量为
 ,
,
调节时间为  s,
s,
静态速度误差系数KV等于该I型系统的开环增益
 1/s,
1/s,
2.串联校正的目标
要求加串联校正装置后系统满足以下性能指标:
(1)超调量
(2)调节时间(过渡过程时间) s
s
(3)校正后系统开环增益(静态速度误差系数) 1/s
1/s
3.串联校正装置的时域设计
从对超调量要求可以得到  % ,于是有
% ,于是有  。
。
由  s 可以得到
s 可以得到  。
。
因为要求 1/s,故令校正后开环传递函数仍包含一个积分环节,且放大系数为25。
设串联校正装置的传递函数为D(s),则加串联校正后系统的开环传递函数为
采用相消法,令  (其中T为待确定参数),可以得到加串联校正后的开环传递函数
(其中T为待确定参数),可以得到加串联校正后的开环传递函数

这样,加校正后系统的闭环传递函数为

对校正后二阶系统进行分析,可以得到


综合考虑校正后的要求,取 T=0.05s ,此时  1/s,
1/s, ,它们都能满足校正目标要求。最后得到校正环节的传递函数为
,它们都能满足校正目标要求。最后得到校正环节的传递函数为
从串联校正装置的传递函数可以设计其模拟电路。有关电路设计与校正效
果请参见后面的频域设计。
4.串联校正装置的频域设计
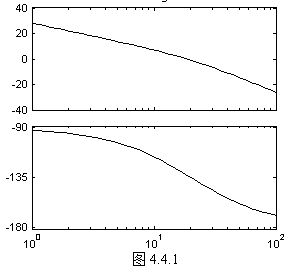
根据对校正后系统的要求,可以得到期望的系统开环传递函数的对数频率特性,见图4.4.1。
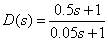
根据未加校正系统的开环传递函数,可画出其相应的对数频率特性,如图4.4.2所示。
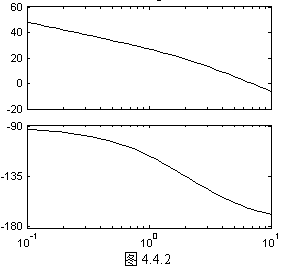
从期望的系统开环传递函数的对数幅频特性,减去未加校正系统开环传递函数的对数幅频特性,可以得到串联校正装置的对数幅频特性,见图4.4.3。
从串联校正装置的对数幅频特性,可以得到它的传递函数:
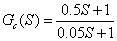
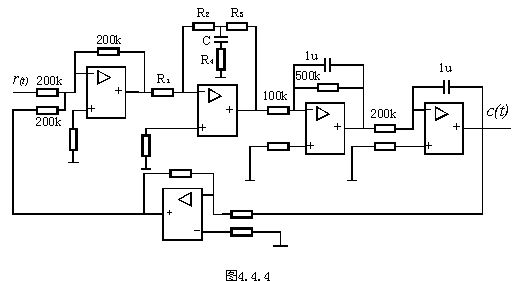
从串联校正装置的传递函数可以设计其模拟电路。图4.4.4给出已加入串联校正装置的系统模拟电路。
在图4.4.4中,串联校正装置电路的参数可取R1=390 ,R2=R3=200,R4=10,C=4.7uF。
,R2=R3=200,R4=10,C=4.7uF。
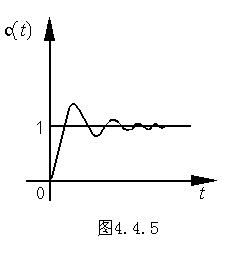
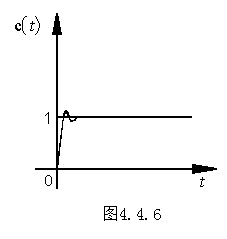
校正前后系统的阶跃响应曲线如图4.4.5、4.4.6所示:
(2)传递函数法
期望的系统开环传递函数除以未加校正二阶闭环系统开环传递函数,可以得到串联校正装置的传递函数。
同样地,可从串联校正装置的传递函数设计其模拟电路,如图4.4.4所示。
六·实验注意事项
在实验过程中,要听从老师的指导,严格按照实验步骤进行,不能任意更改,不熟悉的仪器设备,应先请老师知道后使用,切勿随意乱动。
实验室如有问题发生,应首先用自己学过的知识,独立思考加以解决,努力培养独立分析问题和解决问题的能力,如自己不能解决可与指导老师共同讨论研究,提出解决问题的方法。
七·实验预习要求
每次实验前必须详细预习实验讲义,明了实验目的、原理方法及操作步骤,并在记录本上拟出简单的实验原理、使用方法及操作室的注意事项。
八·实验报告要求
实验进行时,必须随时把观察到的现象和实验数据,如实地记录在实验报告上,不得记在散页纸上,要养成良好的做原始记录的习惯。
第二篇:线性定常系统的串联校正实验指导
实验六 线性定常系统的串联校正
一、实验目的
1.熟悉串联校正装置的结构和特性;
2.掌握串联校正装置的设计方法和系统的实时调试技术。
二、实验设备
同实验一
三、实验内容
1.观测未加校正装置时系统的动、静态性能。
2.按动态性能的要求,分别用时域法或频域法(期望特性)设计串联校正装置。
3.观测引入校正装置后系统的动、静态性能,并予以实时调试,使之动、静态性能均满足设计要求。
4.利用上位机软件,分别对校正前和校正后的系统进行仿真,并与上述模拟系统实验的结果相比较。
四、实验原理
下图是一串联校正系统的方块图:
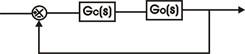
图中校正装置Gc(S)与实验电路G0(S)是串联相连接。串联校正装置有两种:一种是超前校正,它是利用超前校正装置的相位超前特性来改善系统的动态性能;另一种是滞后校正,它是利用滞后校正装置的高频幅值衰减特性,使系统在满足静态性能的前提下又能满足其动态性能的要求。本实验采用串联超前校正,使校正后的系统同时能满足动态和稳态性能的要求。
有关串联校正装置的设计和实验系统的模拟电路,请参看附录。
五、实验步骤
1.利用实验台上的各通用单元,组建所设计二阶闭环系统的模拟电路图(参考本实验附录中的图5-1),并连接好实验电路;当检查接线无误后,接通实验台的电源总开关,并开启±5V,±15V直流稳压电源。
2.把采集卡接口单元的输出端DA1、输入端AD2与电路的输入端相连,电路的输出端则与采集卡接口单元中的输入端AD1相连。连接好采集卡接口单元与PC上位机的通信线。待接线完成并检查无误后,在PC机上启动“THBDC-1”软件。在系统的输入端输入一阶跃信号,观测该系统的稳定性和动态性能指标。具体步骤参考实验一的步骤2。
3.参阅本实验的附录,按对系统性能指标的要求设计串联校正装置的传递函数和相应的模拟电路。
4.利用实验平台,根据步骤3设计校正装置的模拟电路(具体可参考本实验附录的图5-3),并把校正装置串接到步骤1所设计的二阶闭环系统的模拟电路中(图5-4)。然后输入一阶跃信号,观测该系统的稳定性和动态性能指标。
5.改变串联校正装置的相关参数,使系统的性能指标均满足预定的设计要求。
6.利用上位机软件提供的软件仿真功能,完成线性系统串联校正的软件仿真研究,并对电路模拟与软件仿真结果进行相比较。利用上位机软件提供的软件仿真功能完成线性系统软件仿真的具体操作方法请参阅“实验一”中的实验步骤4。
7.根据实验时存储的波形完成实验报告。
六、实验报告要求
1.根据对系统性能的要求,设计系统的串联校正装置,并画出它的电路图。
2.根据实验结果,画出校正前系统的阶跃响应曲线及相应的动态性能指标。
3.观测引入校正装置后系统的阶跃响应曲线,并对实验所得的性能指标与理论计算值作比较。
4.实时调整校正装置的相关参数,使系统的动、静态性能均满足设计要求,并分析相应参数的改变对系统性能的影响。
七、实验思考题
1.加入超前校正装置后,为什么系统的瞬态响应会变快?
2.什么是超前校正装置和滞后校正装置,它们各利用校正装置的什么特性对系统进行校正?
3.实验时所获得的性能指标为何与设计时确定的性能指标有偏差?
八、附录
1.时域校正法
加校正前系统的方框图和模拟电路分别如图5-1和图5-2所示。
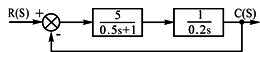
图5-1二阶闭环系统的方框图
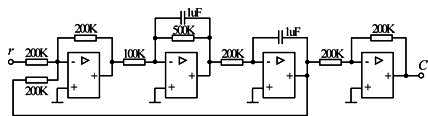
图5-2 二阶闭环系统的模拟电路图
实验台上的参考单元:U6、U7、U10、U5
设计要求: Kv=25 1/s, Mp 0.2, ts1 s
0.2, ts1 s
校正前系统的开环传递函数为

对应的闭环传递函数为


由此可知未加校正装置前系统的超调量为

根据对校正后系统性能指标要求
由


设校正装置的传递函数为 
则校正后系统的开环传递函数为

相应的闭环传递函数

 ,
,
取  , 则
, 则  ,
,
故
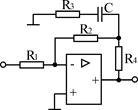

校正装置GC(S)的模拟电路为
图5-3校正装置的电路图
实验台上的参考单元:U13
其中 
T=

校正后系统的方框图如图5-4所示。
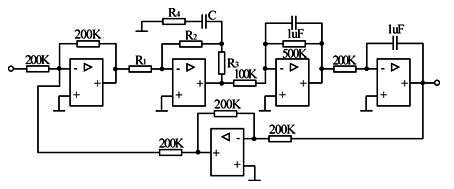
图5-4 校正后二阶系统的电路图
实验台上的参考单元:U6、U13、U11、U10、U5。
校正前后系统的阶跃响应的示意曲线分别如图5-5中的a、b所示:
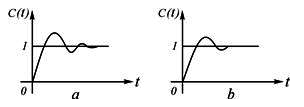
图5-5 加校正装置前后二阶系统的阶跃响应曲线