实验六 线性定常系统的串联校正
一、实验目的
1.熟悉串联校正装置的结构和特性;
2.掌握串联校正装置的设计方法和系统的实时调试技术。
二、实验设备
同实验一
三、实验内容
1.观测未加校正装置时系统的动、静态性能。
2.按动态性能的要求,分别用时域法或频域法(期望特性)设计串联校正装置。
3.观测引入校正装置后系统的动、静态性能,并予以实时调试,使之动、静态性能均满足设计要求。
4.利用上位机软件,分别对校正前和校正后的系统进行仿真,并与上述模拟系统实验的结果相比较。
四、实验原理
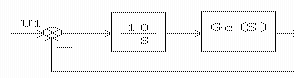
下图是一串联校正系统的方块图:
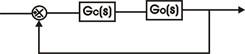
图中校正装置Gc(S)与实验电路G0(S)是串联相连接。串联校正装置有两种:一种是超前校正,它是利用超前校正装置的相位超前特性来改善系统的动态性能;另一种是滞后校正,它是利用滞后校正装置的高频幅值衰减特性,使系统在满足静态性能的前提下又能满足其动态性能的要求。本实验采用串联超前校正,使校正后的系统同时能满足动态和稳态性能的要求。
有关串联校正装置的设计和实验系统的模拟电路,请参看附录。
五、实验步骤
1.利用实验台上的各通用单元,组建所设计二阶闭环系统的模拟电路图(参考本实验附录中的图5-1),并连接好实验电路;当检查接线无误后,接通实验台的电源总开关,并开启±5V,±15V直流稳压电源。
2.把采集卡接口单元的输出端DA1、输入端AD2与电路的输入端相连,电路的输出端则与采集卡接口单元中的输入端AD1相连。连接好采集卡接口单元与PC上位机的通信线。待接线完成并检查无误后,在PC机上启动“THBDC-1”软件。在系统的输入端输入一阶跃信号,观测该系统的稳定性和动态性能指标。具体步骤参考实验一的步骤2。
3.参阅本实验的附录,按对系统性能指标的要求设计串联校正装置的传递函数和相应的模拟电路。
4.利用实验平台,根据步骤3设计校正装置的模拟电路(具体可参考本实验附录的图5-3),并把校正装置串接到步骤1所设计的二阶闭环系统的模拟电路中(图5-4)。然后输入一阶跃信号,观测该系统的稳定性和动态性能指标。
5.改变串联校正装置的相关参数,使系统的性能指标均满足预定的设计要求。
6.利用上位机软件提供的软件仿真功能,完成线性系统串联校正的软件仿真研究,并对电路模拟与软件仿真结果进行相比较。利用上位机软件提供的软件仿真功能完成线性系统软件仿真的具体操作方法请参阅“实验一”中的实验步骤4。
7.根据实验时存储的波形完成实验报告。
六、实验报告要求
1.根据对系统性能的要求,设计系统的串联校正装置,并画出它的电路图。
2.根据实验结果,画出校正前系统的阶跃响应曲线及相应的动态性能指标。
3.观测引入校正装置后系统的阶跃响应曲线,并对实验所得的性能指标与理论计算值作比较。
4.实时调整校正装置的相关参数,使系统的动、静态性能均满足设计要求,并分析相应参数的改变对系统性能的影响。
七、实验思考题
1.加入超前校正装置后,为什么系统的瞬态响应会变快?
2.什么是超前校正装置和滞后校正装置,它们各利用校正装置的什么特性对系统进行校正?
3.实验时所获得的性能指标为何与设计时确定的性能指标有偏差?
八、附录
1.时域校正法
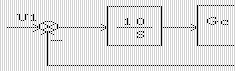
加校正前系统的方框图和模拟电路分别如图5-1和图5-2所示。
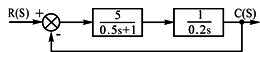
图5-1二阶闭环系统的方框图
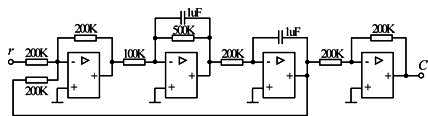
图5-2 二阶闭环系统的模拟电路图
实验台上的参考单元:U6、U7、U10、U5
设计要求: Kv=25 1/s, Mp 0.2, ts1 s
0.2, ts1 s
校正前系统的开环传递函数为

对应的闭环传递函数为


由此可知未加校正装置前系统的超调量为

根据对校正后系统性能指标要求
由


设校正装置的传递函数为 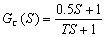
则校正后系统的开环传递函数为

相应的闭环传递函数

 ,
,
取  , 则
, 则  ,
,
故
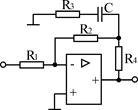

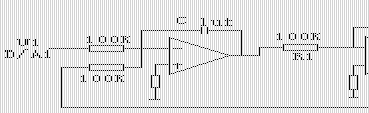
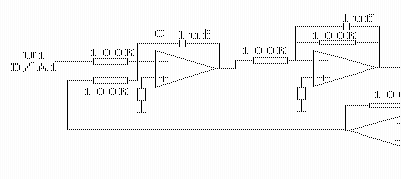
校正装置GC(S)的模拟电路为
图5-3校正装置的电路图
实验台上的参考单元:U13
其中 
T=

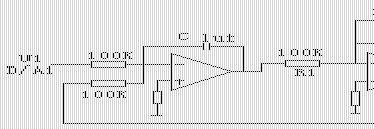
校正后系统的方框图如图5-4所示。
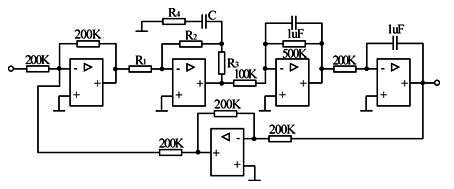
图5-4 校正后二阶系统的电路图
实验台上的参考单元:U6、U13、U11、U10、U5。
校正前后系统的阶跃响应的示意曲线分别如图5-5中的a、b所示:
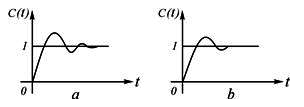
图5-5 加校正装置前后二阶系统的阶跃响应曲线
第二篇:实验八 线性系统的校正
实验八 线性系统的校正
1. 实验目的
1) 加深理解串联校正装置对系统动态性能的校正作用。
2) 对给定系统进行串联校正设计,并通过模拟实验检验设计的正确性。
2. 实验仪器
1) EL-AT-II型自动控制系统实验箱一台
2) 计算机一台
3. 实验内容
1) 串联超前校正
(1)系统模拟电路图如图3-1,图中开关S断开对应未校正情况,接通对应超前校正。
图3-1 超前校正电路图
(2)系统结构图如图3-2
图3-2 超前校正系统结构图
图中 Gc1(s)=2
2(0.055s+1) Gc2(s)= 0.005s+1
2) 串联滞后校正
(1) 模拟电路图如图3-3,开关s断开对应未校状态,接通对应滞后校正。
图3-3 滞后校正模拟电路图
(2)系统结构图示如图
3-4
图3-4 滞后系统结构图
图中 Gc1(s)=10
10(s+1)
Gc2(s) 11s+1
3) 串联超前—滞后校正
(1) 模拟电路图如图3-5,双刀开关断开对应未校状态,接通对应超前—滞后校正。
图3-5 超前—滞后校正模拟电路图
(2) 系统结构图示如图3-6。
图3-6超前—滞后校正系统结构图
图中 Gc1(s)=6
6(1.2s+1)(0.15s+1) Gc2(s) (6s+1)(0.05s+1)
4. 实验步骤
1) 启动计算机,在桌面双击图标 [自动控制实验系统] 运行软件。
2) 测试计算机与实验箱的通信是否正常,通信正常继续。如通信不正常查找原因使通
信正常后才可以继续进行实验。 超前校正
3) 连接被测量典型环节的模拟电路(图3-1)。电路的输入U1接A/D、D/A卡的DA1
输出,电路的输出U2接A/D、D/A卡的AD1输入。检查无误后接通电源。
4) 开关s放在断开位置。
5) 选中 [实验课题→ 连续系统串联校正→超前校正] 菜单项,

鼠标单击将弹出参数
设置窗口。系统加入阶跃信号。参数设置完成后鼠标单击确认测量系统阶跃响应,并记录超调量?p和调节时间ts。
6) 开关s接通,重复步骤5,将两次所测的波形进行比较。并将测量结果记入下表中:
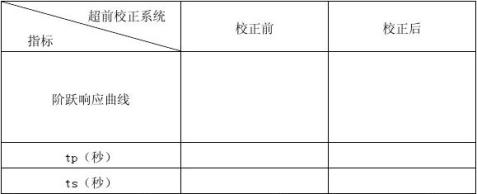
表3-1超前校正系统波形图(学生填写)
滞后校正 7) 连接被测量典型环节的模拟电路(图3-3)。电路的输入U1接A/D、D/A卡的DA1
输出,电路的输出U2接A/D、D/A卡的AD1输入。检查无误后接通电源。
8) 开关s放在断开位置。
9) 选中 [实验课题→ 连续系统串联校正→滞后校正] 菜单项,鼠标单击将弹出参数
设置窗口。系统加入阶跃信号。参数设置完成后鼠标单击确认测量系统阶跃响应,并记录超调量?p和调节时间ts。
10) 开关s接通,重复步骤9,将两次所测的波形进行比较。并将测量结果记入下表中:
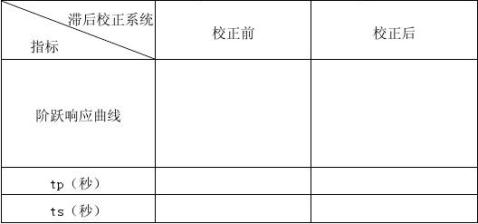
表3-2超前校正系统波形图(学生填写)
超前--滞后校正 11) 连接被测量典型环节的模拟电路(图3-5)。电路的输入U1接A/D、D/A卡的DA1
输出,电路的输出U2接A/D、D/A卡的AD1输入。检查无误后接通电源。
12) 开关s放在断开位置。
13) 选中 [实验课题→ 连续系统串联校正→超前滞后校正] 菜单项,鼠标单击将弹出
参数设置窗口。系统加入阶跃信号。参数设置完成后鼠标单击确认测量系统阶跃响应,并记录超调量?p和调节时间ts。
14) 开关s接通,重复步骤13,将两次所测的波形进行比较。并将测量结果记入下表中:
表3-3超前校正系统波形图(学生填写)
5. 实验报告 1) 计算串联校正装置的传递函数 Gc(s)和校正网络参数。
'?c2) 画出校正后系统的对数坐标图,并求出校正后系统的及ν′。
3) 比较校正前后系统的阶跃响应曲线及性能指标,说明校正装置的作用。
6. 预习要求
1) 阅读实验二的实验报告,明确校正前系统的ωc及ν。
2) 计算串联超前校正装置的传递函数 Gc(s)和校正网络参数,并求出校正后系统
'的?c及ν′。