学院
过程控制系统实验报告书
实验名称 串级控制系统整定
专 业 自动化专业
班 级
指导教师
姓 名
学 号
实验日期
串级控制系统整定
一、实验目的
(1)掌握动态模型的创建方法.。
(2)掌握串级控制系统整定方法。
(3)了解控制系统的特点。
(4)了解串联控制系统的特点。
二、实验器材
计算机一台,MATLAB软件
三、实验原理
.串级控制系统:就是由两个调节器串联在一起,控制一个执
行阀,实现定值控制的控制系统。
. 串级控制系统的通用方框图:
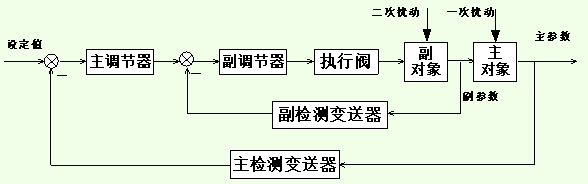
.串级控制系统特点:(1)改善了被控过程的动态特性。
(2)提高了系统的工作频率。
(3)具有较强的抗扰动能力。
(4)具有一定的自适应能力。
.两步整定法
(1)工况稳定时,闭合主回路,主、副调节器都在纯比例作用的条件下,主调节器的比例度置于100%,用单回路控制系统的衰减曲线法整定,求取副调节器的比例度 和操作周期
和操作周期 。
。
(2)将副调节器的比例度置于所求得的数值上,把副回路作为主回路中的一个环节,用同样方法整定主回路,求取主调节器的比例度和操作周期。
四、实验步骤
(1)启动计算机,运行MATLAB应用程序。
(2)在MATLAB命令窗口输入Smulink,启动Simulink。
(3)在Simulink库浏览窗口中,单击工具栏中的新建窗口快捷按钮或在Simulink库窗口中选择菜单命令File New Modeel,打开一个标题为“Untitled”的空白模型编辑窗口。
(4)设被控对象的传递函数为: ,要求被调量始终维持在设定值。设计一个串级控制系统,并且要求控制系统的衰减率为75%,静态误差为零。用MATLAB创建仿真模型。
,要求被调量始终维持在设定值。设计一个串级控制系统,并且要求控制系统的衰减率为75%,静态误差为零。用MATLAB创建仿真模型。
(5)按两步整定法整定调节器参数。
(6)按步骤(5)的结果设置调节器参数,启动仿真,通过示波器模块观测并记录系统输出的变化曲线。
(7)施加内扰,观测系统运行情况。
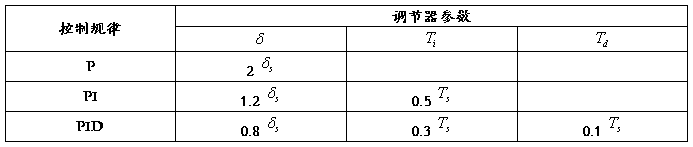
. 衰减曲线法整定参数计算表:
五、系统曲线及其整定参数
1、内回路系统的整定
利用MATLAB软件进行整定,置内回路调节器积分时间 为零,微分时间
为零,微分时间 为零,比例带
为零,比例带 为较大值,并将系统投入运行。改变调节器
为较大值,并将系统投入运行。改变调节器 的数值,直到系统出现4:1的衰减震荡过程。此时调节器的参数为=10,
的数值,直到系统出现4:1的衰减震荡过程。此时调节器的参数为=10, =0,
=0, =0
=0
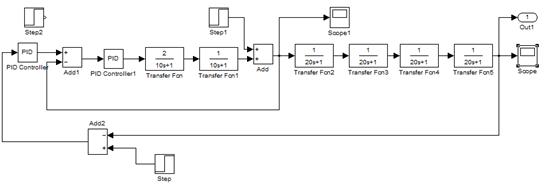
实验原理图:

整定的系统曲线如下:
2、外回路系统的整定
利用MATLAB软件进行整定,内回路调节器不变,置外回路调节器积分时间为零,微分时间为零,比例带为较大值,并将系统投入运行。改变调节器的数值,直到系统出现4:1的衰减震荡过程。
如图:

此时的比例带0.8 =1.8,= 153 ,=2.25
则计算出的PID参数为: =1.8 ,=0.039 ,= 27.54 。
对上述计算参数进行调整,直到曲线更好的出现4:1的衰减震荡过程。
实验原理图:
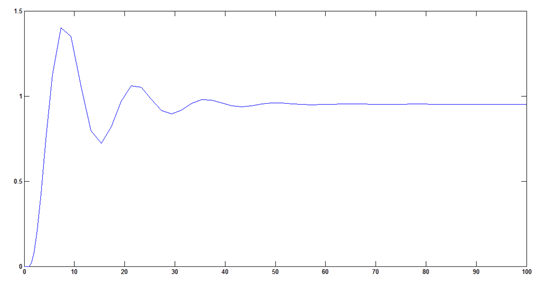
整定曲线如下:

六、实验结果分析
(1) 串级控制系统由于副回路的存在,提高了系统的工作频率,减小了振荡周期,在衰减系数相同的情况下,缩短了调节时间,提高了系统的快速性。
(2)将计算的参数设置为PID参数,得到的曲线整体形状已经达到了预期要求,但超调量和衰减率还没有达到要求,故需要进一步细调。
(3)对上述系统经行细调,首先调节积分环节和比例环节,使系统的衰减率近似达到75%,同时也使系统超调量减小了,然后稍微增加系统的稳定性。PID系统具有更好的稳定特性,系统对外界干扰响应时间短,系统干扰能力越强。
第二篇:串级控制系统参数整定
实验三:串级控制系统参数整定
PID控制器由于自身具有的相对容易理解和实现的特点而被广泛应用于过程控制工业中。在实践中,它经常被融入一个复杂的控制结构中,以达到一个更好的控制效果。在这些复杂的控制结构中,通常利用串级控制组合来减小干扰引起的最大偏差和积分误差。容易实现的优点和潜在的大控制性能的提高导致串级控制广泛应用达数十年。它已经成为一个由工业过程控制器提供的标准应用。
串级控制系统由两个控制回路构成:一个可以快速动态消除输入干扰的内部回路,和一个可以调节输出效果的外部回路。通常,他们是通过一个连续的方式来整定的。首先,外部回路控制器设置为手动,对内部回路进行整定。随后,启用内部回路的整定结果,接着整定外部回路。如果控制效果不理想,应该调换整定的顺序。所以,整定串级控制系统是一项相当笨重耗时的任务,特别是具有大时间常数和时间延迟的系统。
PID自整定解除了手动整定控制器的烦恼,并且已经成功的应用于很多工业领域中。但是,到目前为止,却很少有关于串级系统自整定技术的发展的文学报道。其中,Li etal利用模糊逻辑进行串级控制器的自整定。Hang et al. 应用一个重复的延迟自动整定方法来整定串级控制系统,延迟反馈测试被验证了两次,一次在内部回路,另一次在外部回路。虽然特殊的控制器整定已经被自动化,但整定过程的自然顺序并没有改变。Tan 提出了一个在一个实验中实行整体整定过程的方法,但是这个实验需要过程的过去的信息。而且,外部回路设计时所用的极限频率是基于未考虑内部回路控制参数改变的初始极限频率。 这篇论文提供了串级控制系统自整定的一种新方法。通过利用串级控制系统的基本性能,在外部回路中利用一个简单的延迟反馈测试来确定内部和外部回路过程模型参数。一个基于Pade系数和Markov参数,匹配PID控制器整定方法的模型,被提出来控制整体系统效果。两个例子来说明该方法的有效性。
2.串级控制系统的基本原理

图1
串级控制组合的结构如图1,内部回路嵌套于外部回路里,外部回路的输出变量是被控对象。控制系统由两个过程和两个控制器组成。分别为外部回路传递函数 ,内部回路传递函数
,内部回路传递函数 ,外部回路控制器
,外部回路控制器 和内部回路控制器
和内部回路控制器 。
。
串级控制系统的两个控制器都是标准的反馈控制器。通常情况下,内部回路为一个比例控制器,当内部回路过程包含基本时间延迟时需要用到积分作用,外部过程使内部回路增益是有限的。
为了在它影响到外部回路之前减小或消除内部回路干扰d2,内部回路比外部回路应该有一个更快的动态响应(工业经验法则里,至少应快5倍以上)。因此,内部闭环回路的相位滞后应该比外部回路小。这个特点就是应用串级控制的基本原理。内部回路的交叉频率比外部回路高,使内部回路控制器有更高的增益,能够在没有危及系统的稳定性的情况下更有效的调节内部回路干扰事故的影响。
3.继电反馈测试串级控制系统
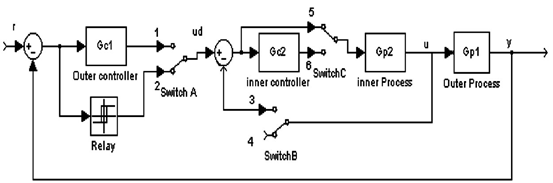
图2
Astrom-Hagglund 继电反馈测试是基于观察法:当过程输出落后输入 弧度时,闭环回路系统可能在极限频率附近产生等幅振荡(相位滞后的频率)。文中提到的自整定串级控制系统的继电反馈测试如图2. 当继电反馈开始,开关A打向2,B打向4,C打向5. 测试后,A打向1,B打向3,C打向6. 当内部回路过程比外部回路过程响应更快时,u就像一个阶跃响应,固定振荡周期的一半,如图3. 因此一个简单的继电反馈测试就可以同时获得内部回路和外部回路过程模型参数。
弧度时,闭环回路系统可能在极限频率附近产生等幅振荡(相位滞后的频率)。文中提到的自整定串级控制系统的继电反馈测试如图2. 当继电反馈开始,开关A打向2,B打向4,C打向5. 测试后,A打向1,B打向3,C打向6. 当内部回路过程比外部回路过程响应更快时,u就像一个阶跃响应,固定振荡周期的一半,如图3. 因此一个简单的继电反馈测试就可以同时获得内部回路和外部回路过程模型参数。
实际上,真正的过程模型通常是由低阶加上打印为代表的模型。这里,采用了传递函数: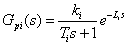 (1)
(1) 时,代表外部过程模型,
时,代表外部过程模型, 代表内部过程模型。这个模型有三个特征参数:静态增益k,时间常数T,停滞时间L。它在很多工业应用中很好的描述了一个线性单调过程,通常能满足PID控制器的整定。
代表内部过程模型。这个模型有三个特征参数:静态增益k,时间常数T,停滞时间L。它在很多工业应用中很好的描述了一个线性单调过程,通常能满足PID控制器的整定。