实验三控制系统的稳定性分析
一、 实验目的:
1. 观察系统的不稳定现象。
2. 研究系统开环增益和时间常数对稳定性的影响
3. 学习用MATLAB仿真软件对实验内容中的电路进行仿真。
二、 实验原理
线性系统工作在平衡状态,受到扰动偏离了平衡状态,扰动消失之后,系统又能恢复到平衡状态,称系统是稳定的。稳定性是系统的固有特性,是扰动消失后系统自身的恢复能力。稳定性只由结构、参数决定,与初始条件及外作用无关。
不稳定的系统是无法正常工作的。稳定性是系统正常工作的首要条件。因此,分析系统的稳定性,确定使系统稳定工作的条件是研究设计控制系统的重要内容。
稳定判据则只要根据特征方程的系数便可判别出特征根是否具有负实部,从而判断出系统是否闭环稳定。系统闭环稳定的充分必要条件是:特征方程各项系数均大于零。
三、 实验步骤
1. 双击图标【matlab】行软件。
2. 在【simulink】模块中建立系统仿真模型并运行。
3. 设置输入信号的【属性对话框】。例:【step values】阶跃值=1000。
4. 设置传递函数的【属性对话框】。
取R3的值为50K,100K,200K,此时相应的K=10,K1=5,10,20。观察不同R3值时显示区内的输出波形(既U2的波形),找到系统输出产生增幅振荡时相应的R3及K值。再把电阻R3由大至小变化,即R3=200k,100k,50k,观察不同R3值时显示区内的输出波形, 找出系统输出产生等幅振荡变化的R3及K值,并观察U2的输出波形。
5. 在步骤4条件下,使系统工作在不稳定状态,即工作在等幅振荡情况。改变电路中的电容C由1f变成0.1f,重复实验步骤3观察系统稳定性的变化。
四、 实验内容
1. 建立仿真模型
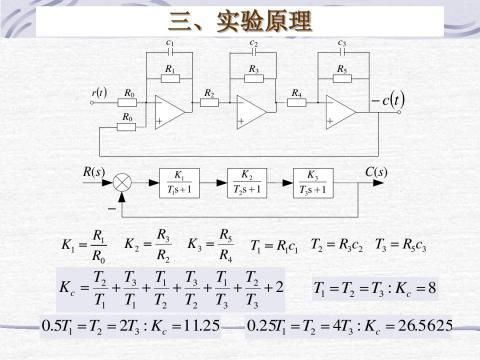
系统模拟电路图如下图所示。
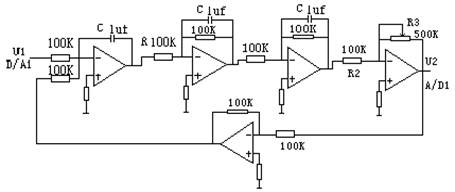
其开环传递函数为: G(s)=10K/s(0.1s+1)(Ts+1)
式中,K1=R3/R2,R2=100K,R3=0~500K;T=RC,R=100K,C=1f或C=0.1f两种情况。
2.画出系统增幅或减幅振荡的波形图
(1)C=1uf时:
a) R3=50K K=5 →二阶欠阻尼系统、衰减震荡→稳定

b) R3=100K K=10 →二阶欠阻尼系统、衰减震荡→稳定
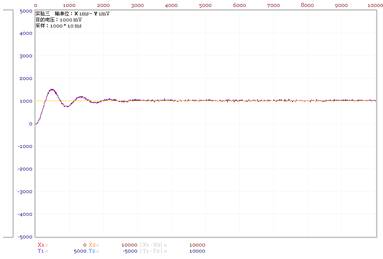
c) R3=200K K=20 →二阶欠阻尼系统、衰减震荡→稳定
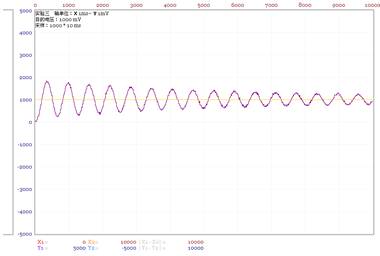
d) R3=217k →等幅振荡→不稳定
 s
s
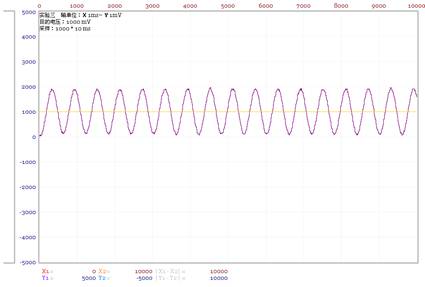
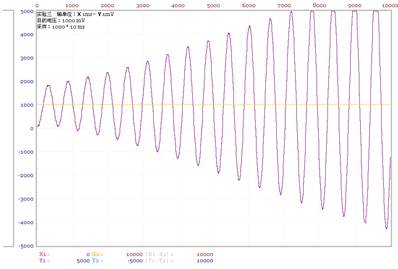
e) R3=220k →增幅振荡→不稳定
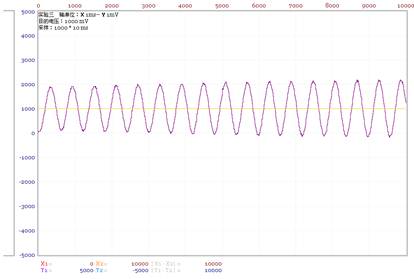
f) R3=260k →增幅振荡→不稳定
(2)C=0.1uf时:
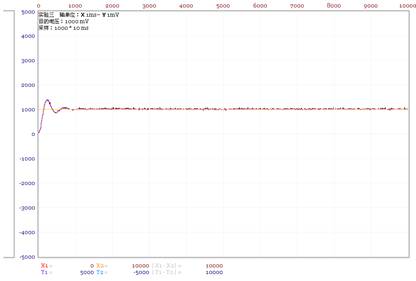
a) R3=50k →二阶欠阻尼系统→稳定
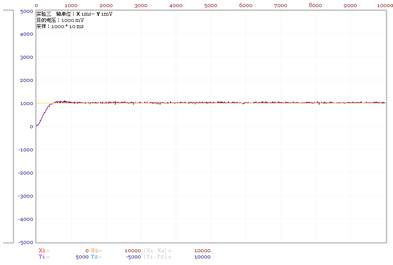
b) R3=100K →二阶欠阻尼系统→稳定

c) R3=200K→二阶欠阻尼系统→稳定
(3)计算系统的临界放大系数,并与测得的临界放大系数相比较。
实际测了得,临界放大系数是2.17,计算得系统的放大系数是2,相差不大,在可允许的误差范围内。
五、 实验总结报告
1. 画出控制系统模拟电路图及SIMULINK仿真模型。
2. 画出系统增幅或减幅振荡的波形图。
3. 计算系统的临界放大系数,并与实验中测得的临界放大系数相比较。
4. 写出实验的心得与体会。
第二篇:实验3 线性系统的稳定性分析