实 验 报 告
实验名称 线性系统的校正

第二篇:自动控制原理实验报告
机械电子工程本科专业
《自动控制原理》实验报告
姓 名
学 号
分 校
上海开放大学
实验一 典型环节的特性分析
一、实验目的
1. 掌握运用模拟机模拟各种典型环节的方法;
2. 掌握阶跃响应测试方法;
3.了解各典型环节参数变化对各典型环节特性的影响;
4. 熟悉并掌握模拟仿真实验所用实验仪器的使用方法 。
二、实验仪器
- THBDC-1型 信号与系统·控制理论及计算机控制技术实验平台;
2. 双踪慢扫描示波器 1台;
3. 数字万用表 1只。
三、实验原理
根据数学模型的相似原理,将运算放大器、电阻和电容作适当组合,模拟各典型环节,然后加入阶跃信号,测试各典型环节阶跃响应曲线。
四、实验内容
1.  比例(P)环节
比例(P)环节
比例环节的传递函数:
比例环节的模拟电路图如下 :
图中,后级为反相器。通过改变电路中 ,
, 的阻值可改变放大系数K。
的阻值可改变放大系数K。
实验参数:
2. 积分环节
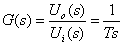 积分环节的传递函数:
积分环节的传递函数:
积分环节的模拟电路图如下:
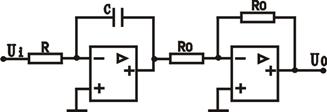
图中,后级为反相器。其中T=RC,通过改变R、C的值可改变响应曲线的上升斜率。
实验参数: =1 s;
=1 s;  =2 s。
=2 s。
 3. 惯性环节
3. 惯性环节
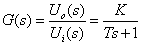
惯性环节的传递函数:
惯性环节的模拟电路图如下:
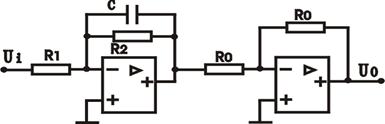
图中,后级为反相器。其中:  1 ,
1 ,  ,通过改变,和C的值可改变惯性环节的放大系数K和时间常数T。
,通过改变,和C的值可改变惯性环节的放大系数K和时间常数T。
实验参数: =1 , =1 s;
=1 , =1 s;
 =1, =0.5 s。
=1, =0.5 s。
 =2,
=2,  =0.5 s。
=0.5 s。
4. 比例积分(PI)环节
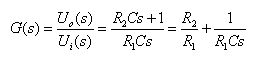
比例积分环节的传递函数:
比例积分环节的模拟电路图如下:
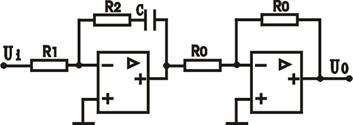
图中,后级为反相器。其中,, ,通过改变,和C的值可改变比例积分环节的放大系数K和积分时间常数T。
,通过改变,和C的值可改变比例积分环节的放大系数K和积分时间常数T。
实验参数:=1 , =1 s;
=2, =1 s。
五、实验步骤
1. 根据各典型环节的传递函数和所给出的实验参数,利用实验平台上的模拟电路单元,构建各典型环节的模拟电路;检查电路接线无误后,接通实验平台的电 源开关,并开启±5V,±15V直流稳压电源;
2. 调节阶跃信号Ui幅度(1V),将阶跃信号 Ui 接入所模拟环节的输入端,将示波器接入所模拟环节的输出端;
3. 按下阶跃信号按钮,观测和记录典型环节的阶跃响应曲线。
六、实验要求
记录测得的各典型环节单位阶跃响应曲线
*七、实验结果分析
分析参数变化对各环节动态特性的影响
*八、实验思考题
1. 惯性环节在什么条件下,可以近似地视为积分环节?而又在什么条件下,惯性环节可以近似地视为比例环节?
2. 在积分环节和惯性环节实验中,如何根据阶跃响应曲线,来确定积分环节和惯性环节的时间常数?
实验二 二阶系统的动态特性分析
一、实验目的
1.通过模拟电路模拟二阶系统,掌握运用模拟机模拟线性控制系统的方法;
2.通过实验了解系统参数 (阻尼比)、
(阻尼比)、 (自然频率)变化对二阶系统动态性能的影响;
(自然频率)变化对二阶系统动态性能的影响;
3.掌握二阶系统超调量 、调节时间
、调节时间 等动态性能指标的测试方法。
等动态性能指标的测试方法。
二、实验仪器
1. THBDC-1型 信号与系统·控制理论及计算机控制技术实验平台;
2. 双踪慢扫描示波器 1台;
3. 数字万用表 1只。
三、实验原理
根据数学模型的相似原理,将运算放大器、电阻和电容作适当组合,模拟二阶系统,然后加入阶跃信号,测试二阶系统阶跃响应曲线。
 四、实验内容
四、实验内容
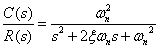
二阶系统的传递函数:
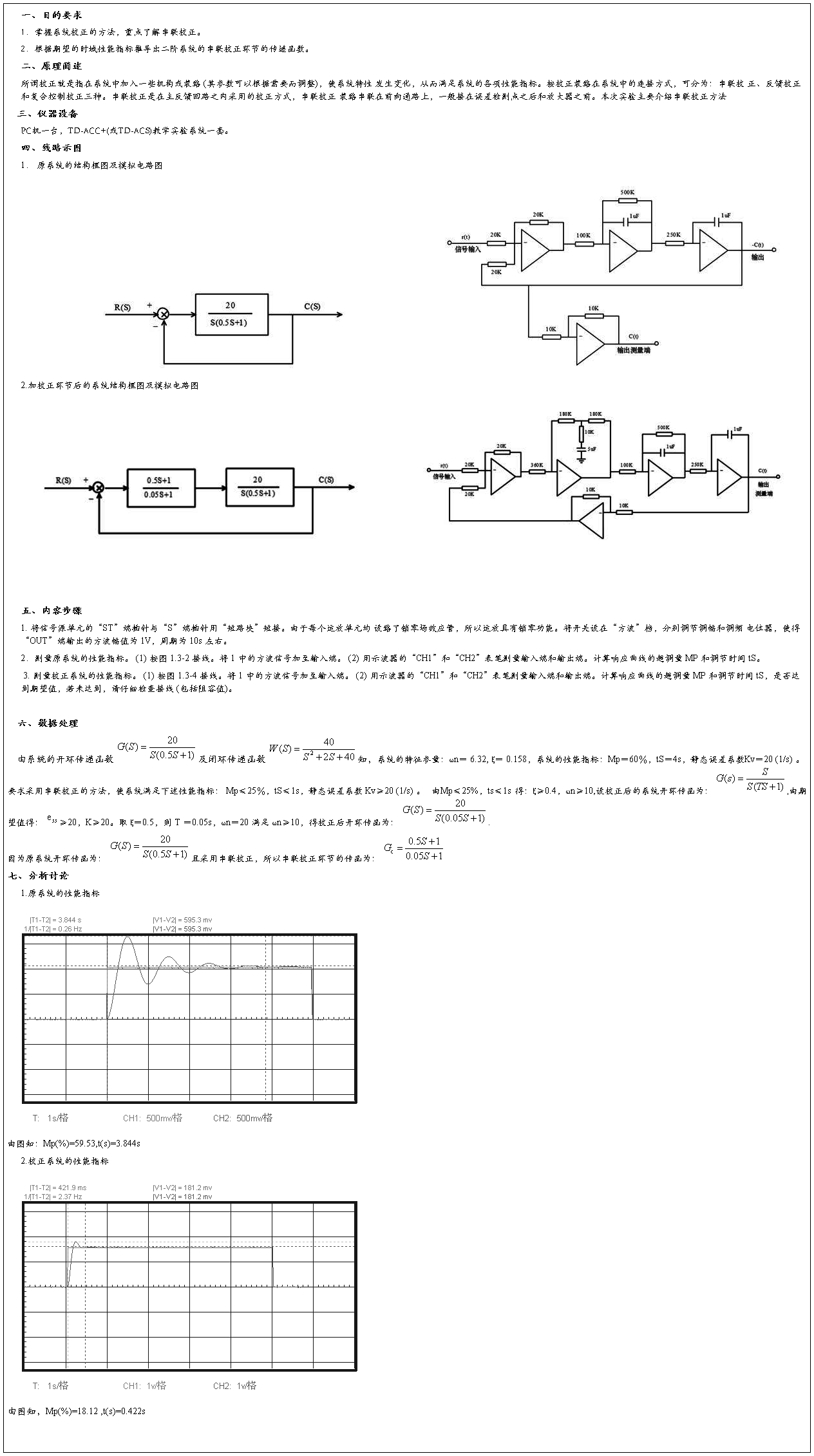
二阶系统的结构图如下:


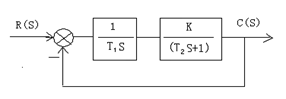
其中、与 之间关系为 :
之间关系为 :
二阶系统模拟电路图如下:
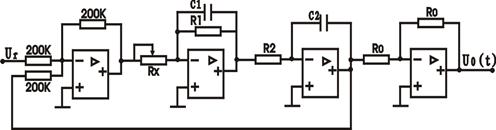
图中, ,
,
 ;
;
实验参数: =1 s ; =10 , =5,=0.213。
=1 s ; =10 , =5,=0.213。
五、实验步骤
1.根据二阶系统的传递函数和所给出的实验参数,利用实验平台上的模拟电路单元,构建二阶系统的模拟电路;检查电 路接线无误后,接通实验平台的电源开关并开启±5V,±15V直流稳压电源;
2. 调节阶跃信号 Ui 幅度(3V) , 将阶跃信号 Ui接入所模拟二阶系统的输入端,将示波器接入所模拟二阶系统的输出端;
3. 按下阶跃信号按钮,观测和定量记录二阶系统的阶跃响应曲线。
六、实验要求
记录实验数据和结果
*七、实验结果分析
将实验结果与理论曲线进行分析比较
*八、实验思考题
1. 开环增益K对系统性能有什么影响?
2. 如果阶跃输入信号的幅值过大,会在实验中产生什么后果?
3. 在电路模拟控制系统中,如何实现负反馈和单位负反馈?
实验三 线性控制系统的串联校正
一、实验目的
1. 了解串联校正的分析和设计方法;
2. 掌握校正装置的电路模拟方法;
3. 通过实验了解校正装置的结构、 特性和对系统性能的影响。
二、实验仪器
1. THBDC-1型 信号与系统·控制理论及计算机控制技术实验平台;
2. 双踪慢扫描示波器 1台;
3. 数字万用表 1只。
三、实验原理
根据数学模型的相似原理,将运算放 大 器、电阻和电容作适当组合,模拟待校正系统、校正装置和校正后系统,然后加入阶跃信号,分别测试待校正系统、校 正装置和校正后系统阶跃响应曲线。
四、实验内容
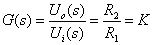
串联校正系统的结构图如下:

1、 图中校正装置Gc(s)与被控对象Go(s)是串联相接。
2、串联校正装置有两种:
Ø 超前校正:利用超前校正装置的相位超前特性来改善系统的动态性能;
Ø 滞后校正:利用滞后校正装置的高频幅值衰减特性,使系统在满足静态性能的前提下又能满足其动态性能的要求。
3、 本次实验只进行串联超前校正实验:
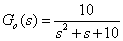 待校正系统的闭环传递函数:
待校正系统的闭环传递函数:
待校正系统模拟电路图参见实验二。
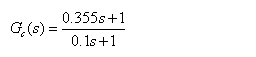
串联超前校正装置传递函数 :
串联超前校正装置模拟电路图如下:
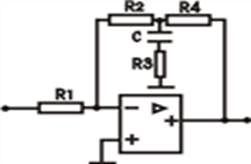
图中: =1000 k, =510 k,
=510 k,  =100 k,C=1μf。
=100 k,C=1μf。
五、实验步骤
1. 根据待校正系统的传递函数、串联校正装置传递函数和校正后系统传递函数,分别利用实验平台上的模拟电路单元,构建相应的模拟电路;检查电路接线无误后,接通实验平台的电源开关,并开启±5V,±15V直流稳压电源;
2. 调节阶跃信号 Ui 幅度(3V),将阶跃信号Ui 接入相应所模拟的待校正系统、串联校正装置和校正后系统的输入端,将示波器接入相应所模拟的待校正系统、串联校正装置和校正后系统的输出端;
3. 按下阶跃信号按钮,观测和定量记录待校正系统、串联校正装置和校正后系统的阶跃响应曲线。
六、实验要求
1、根据串联校正系统的结构图、串联超前校正装置模拟电路图和待校正系统模拟电路图,自行设计校正后系统的模拟电路图。
2、记录实验结果,画出校正前后系统的阶跃响应曲线,比较校正前后系统性能指标变化。
*七、实验结果分析
根据实验所得的校正后系统性能指标与理论计算值作比较
*八、实验思考题
1 . 加入超前校正装置后,系统的性能指标有什么变化?
2. 实验时所获得的校正后系统性能指标为何与理论设计有差异?