实验三 控制系统串联校正
一、 实验目的
1、了解和掌握串联校正的分析和设计方法。
2、研究串联校正环节对系统稳定性及过渡过程的影响。
二、 实验内容
1、设计串联超前校正,并验证。
2. 设计串联滞后校正,并验证。
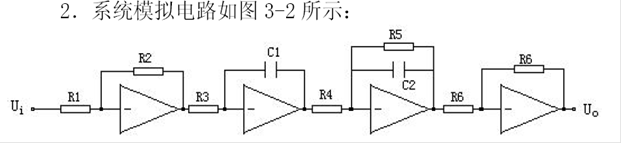
三、 实验原理

其中Gc(s)为校正环节,可放置在系统模型中来实现,也可使用模拟电路的方式由模拟机实现。
 3.未加校正时, 。
3.未加校正时, 。
4.加串联超前校正时, ,
,
给定 ,则
,则 。
。
5.加串联滞后校正时,
给定 ,则
,则 。
。
四、实验数据
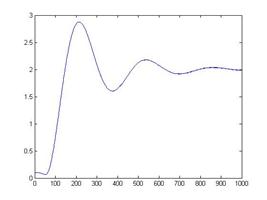
1.未加校正 σ%=45.07 ts=6.007
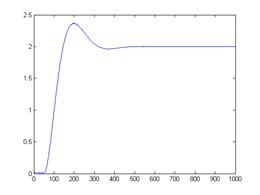
2.加超前校正σ%=21.988 ts=2.406
3.加滞后校正:σ%=19.46 ts=14.55
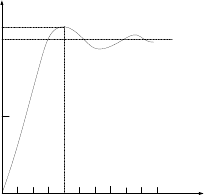
五、实验结果图
(1)未校正

(2)超前校正
六、数据分析
时域角度,超前和滞后都减少了系统的超调量,使得过渡过程变得较为平稳。滞后校正增加了系统的调节时间,过渡过程变慢,系统响应变得迟钝;超前校正减少了调节时间,过渡过程变快,系统响应变得迅速。
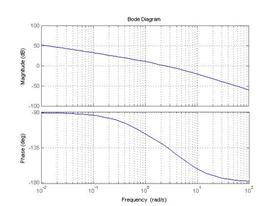
从频域角度看,超前校正和滞后校正都增大了系统的相稳定裕度,系统稳定性增强。
11091061 章学丰
110923班
第二篇:北航自动控制原理试题
班号 学号 姓名 成绩
《 自动控制原理B 》期末考试卷
一、填空题(35分)
1、工程上常常用三个方面来评价自动控制系统的总体性能:、、。飞机控制系统框图1如下,系统的控制方式为 ,被控对象和执行机构分别为: 和 。(6分)
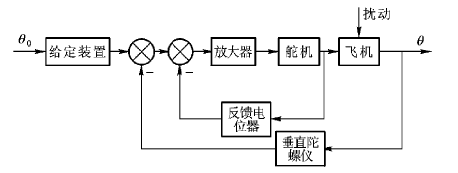
图1、飞机自动控制系统框图
2、试写出下列典型环节的传递函数G(s)。比例环节节 ; 积分环节 ;惯性环节 ;振荡环节 。(5分)
3、单位负反馈系统的闭环传递函数为Y?s?Ks?b(a, b为正数), ?2Rss?as?b
K=(5分)
4、闭环系统如图2所示,系统前向通道传递函数G(s)表达式为
G(s)?20(s?5)(4s?1)5s?1,反馈通道传递函数为,那H(s)?s?2s(s?0.5)(s?40)(0.1s2?0.08s?1)
么前向通路增益为KG=____,前向通路根轨迹增益为KG*=_ __,反馈通路增益为KH=____,反馈通路根轨迹增益为KH*= _开环系统根轨迹增益为K*= _闭环系统根轨迹增益为K1*= ___。(6分)
图2、基本反馈控制系统原理图
K(0.5s?1)
, 2
s(s?1)(0.5s?s?1)
5、已知单位负反馈系统的开环传递函数为G(s)?
则系统稳定时的K值范围是 。(6分)
6、已知系统单位阶跃响应为c(t)?1?e?4t?2e?2t,则系统频率特性表达式为 。(7分)
二、图3表示惯性导航地垂线跟踪系统结构图。试确定闭环传递函数C(s)/R(s)。(10分)
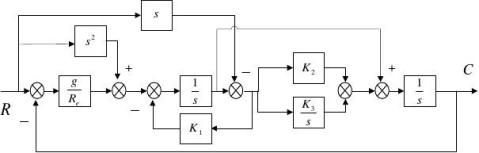
图3、惯性导航地垂线跟踪系统结构图
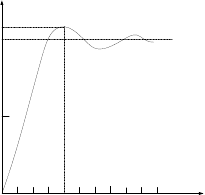
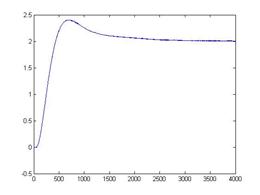
三、设图4(a)所示的系统的单位阶跃响应曲线如图4(b)所示,确定参数K1、K2和a的值。(10分)
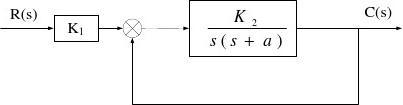
图4(a)系统结构图
h(t)
1.00
0.40.81.21.62.0
图4(b)系统单位阶跃响应
四、系统结构图如图5所示,试选取?值使系统具有阻尼比??0.707,并选取G(s) 使得干扰N对系统输出没有影响。(10分)
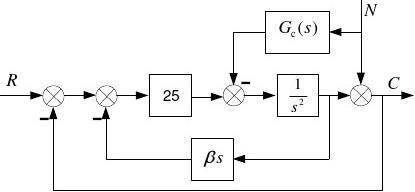
图5
五、已知控制系统前向通道和反馈通道的传递函数分别为
G(s)?K(s?1)5, H(s)?s2?4s?4s?5
绘制当K从0??变化时根轨迹,确定使系统闭环稳定的K值范围。(10分)
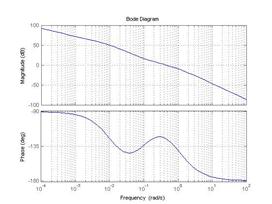
六、某系统的开环对数幅频特性曲线如图6所示,其中虚线表示校正前的,实线表示校正后的。求解:
1)确定所用的是何种串联校正性质的校正,并写出校正装置的传递函数Gc(s);
2)确定校正后系统临界稳定时的开环增益值;
3)当开环增益K?1时,求校正后系统的相位裕量?,幅值裕量h。(15分)

d?s?1)
图6
七、单位反馈系统开环传递函数G(s)?200,试设计校正网络,使系统满s(0.1s?1)
足:(1)??45?;(2)截止频率不低于50(rad/s)。(10分)