线性系统的频域分析
一、实验目的
1.掌握用MATLAB语句绘制各种频域曲线。
2.掌握控制系统的频域分析方法。
二、实验内容
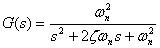
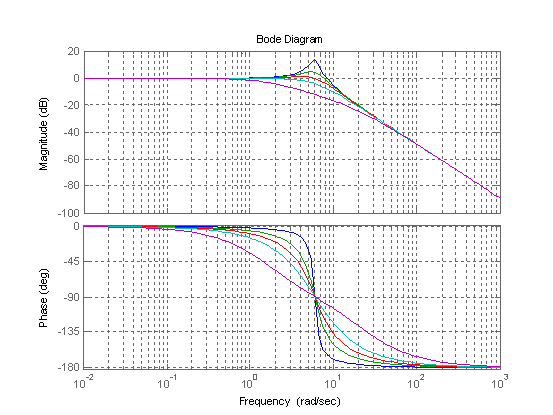
1.典型二阶系统
绘制出 ,
, ,0.3,0.5,0.8,2的bode图,记录并分析
,0.3,0.5,0.8,2的bode图,记录并分析 对系统bode图的影响。
对系统bode图的影响。
解:
程序如下:
num=[0 0 36];den1=[1 1.2 36];den2=[1 3.6 36];
den3=[1 6 36];den4=[1 9.6 36];den5=[1 24 36];
w=logspace(-2,3,100);
bode(num,den1,w)
grid
hold
bode(num,den2,w)
bode(num,den3,w)
bode(num,den4,w)
bode(num,den5,w)
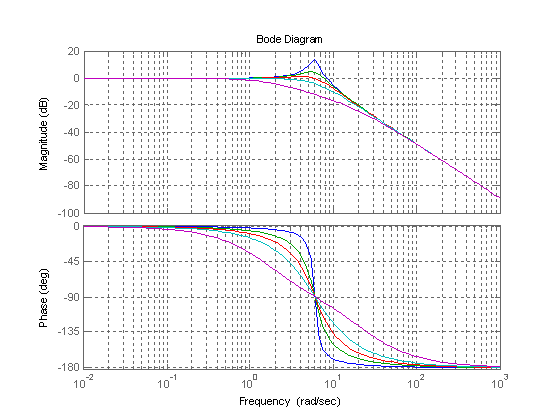
分析:随着 的增大,伯德图在穿越频率处的尖峰越明显,此处用渐近线代替时误差越大.
的增大,伯德图在穿越频率处的尖峰越明显,此处用渐近线代替时误差越大.
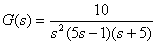
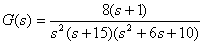
2.系统的开环传递函数为

绘制系统的Nyquist曲线、Bode图和Nichols图,说明系统的稳定性,并通过绘制阶跃响应曲线验证。
解: 程序如下
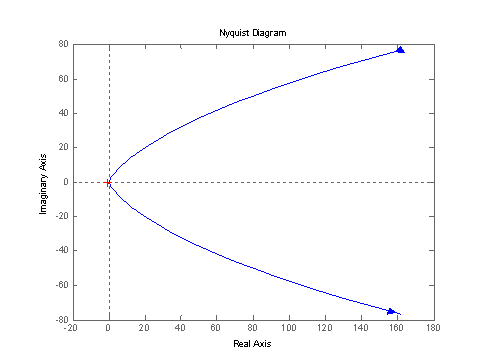
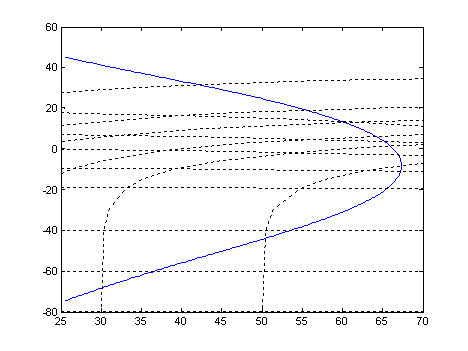
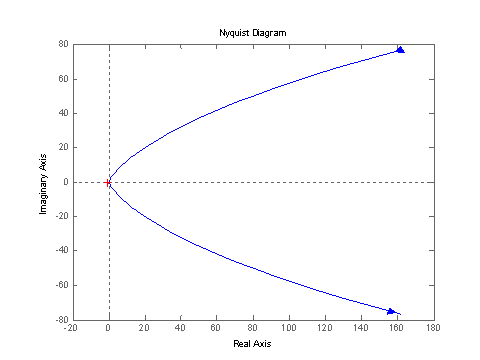
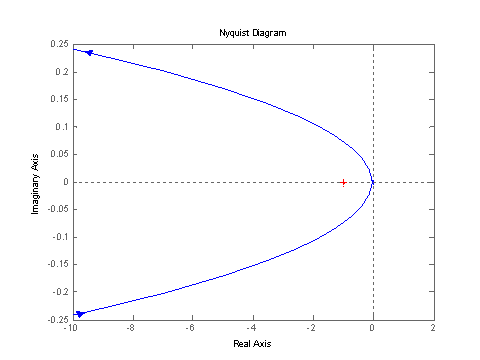
奈氏曲线:
(1) num1=[0,0,10];den1=conv([1,0],conv([1,0],conv([5,-1],[1,5])));
w=logspace(-1,1,100);
nyquist(num1,den1,w)
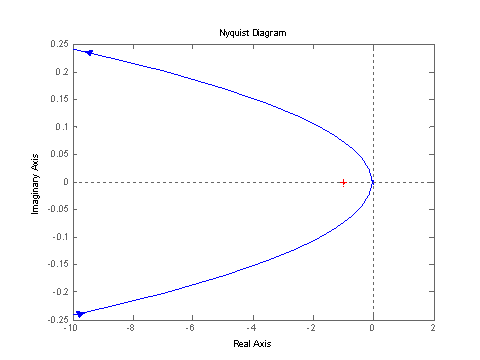
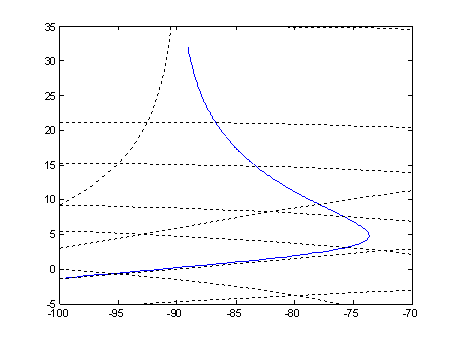
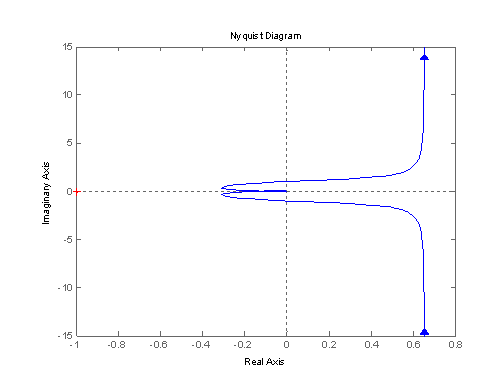
(2) num2=[8,8];den2=conv([1,0],conv([1,0],conv([1,15],[1,6,10])));
w=logspace(-1,1,100);
nyquist(num2,den2)
(3) num3=[4/3,4];den3=conv([1,0],conv([0.02,1],conv([0.05,1],[0.1,1])));
w=logspace(-1,1,100);
nyquist(num3,den3)
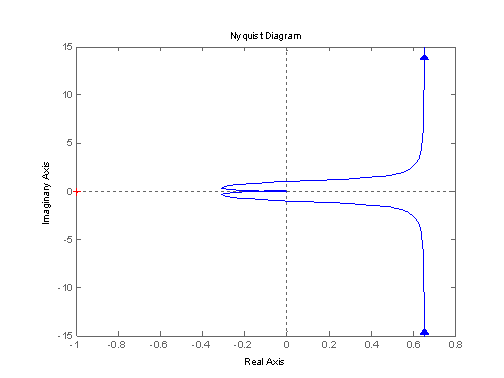
分析:系统1,2 不稳定,系统3稳定。
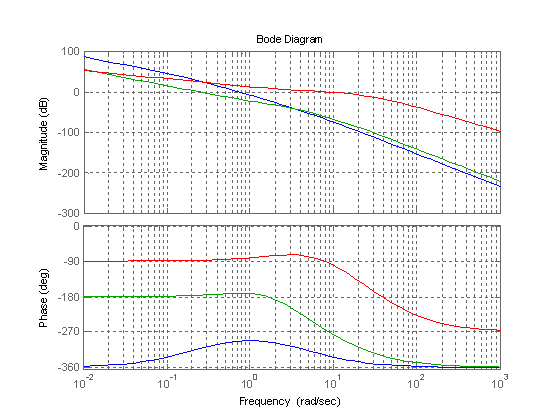
伯德图:
num1=[0,0,10];den1=conv([1,0],conv([1,0],conv([5,-1],[1,5])));
num2=[8,8];den2=conv([1,0],conv([1,0],conv([1,15],[1,6,10])));
num3=[4/3,4];den3=conv([1,0],conv([0.02,1],conv([0.05,1],[0.1,1])));
bode(num1,den1)
grid
hold
bode(num2,den2)
bode(num3,den3)
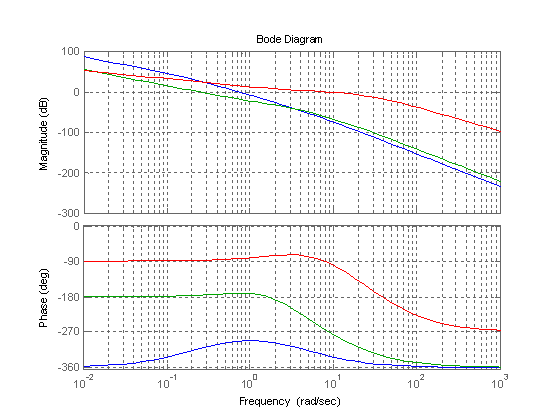
分析:系统1,2 不稳定,系统3稳定。
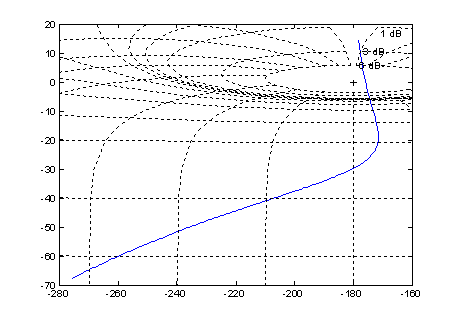
尼科尔斯图
(1) num1=[0,0,10];den1=conv([1,0],conv([1,0],conv([5,-1],[1,5])));
w=logspace(-1,1,500);
[mag,phase]=nichols(num1,den1,w);
plot(phase,20*log10(mag))
ngrid
(2) num2=[8,8];den2=conv([1,0],conv([1,0],conv([1,15],[1,6,10])));
w=logspace(-1,1,500);
[mag,phase]=nichols(num2,den2,w);
plot(phase,20*log10(mag))
ngrid
(3) num3=[4/3,4];den3=conv([1,0],conv([0.02,1],conv([0.05,1],[0.1,1])));
w=logspace(-1,1,500);
[mag,phase]=nichols(num3,den3,w);
plot(phase,20*log10(mag))
ngrid
分析:系统1,2 不稳定,系统3稳定。
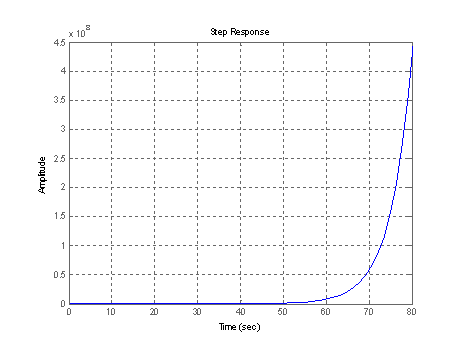
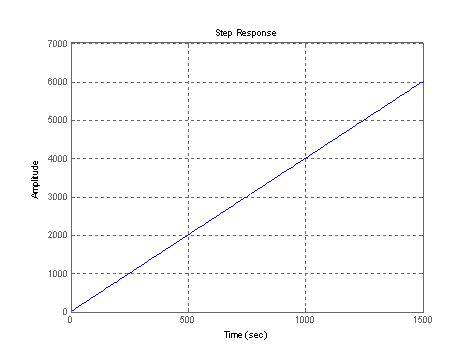
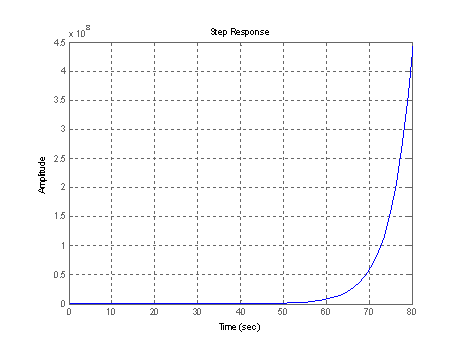
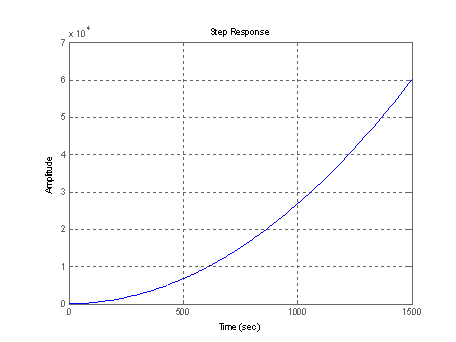
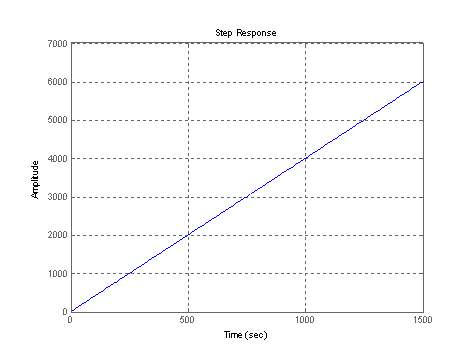
阶跃响应曲线
(1)num1=[0,0,10];den1=conv([1,0],conv([1,0],conv([5,-1],[1,5])));
step(num1,den1)
grid
(2) num2=[8,8];den2=conv([1,0],conv([1,0],conv([1,15],[1,6,10])));
step(num2,den2)
grid

(3) num3=[4/3,4];den3=conv([1,0],conv([0.02,1],conv([0.05,1],[0.1,1])));
step(num3,den3)
grid
3.已知系统的开环传递函数为 。求系统的开环截止频率、穿越频率、幅值裕度和相位裕度。应用频率稳定判据判定系统的稳定性。
。求系统的开环截止频率、穿越频率、幅值裕度和相位裕度。应用频率稳定判据判定系统的稳定性。
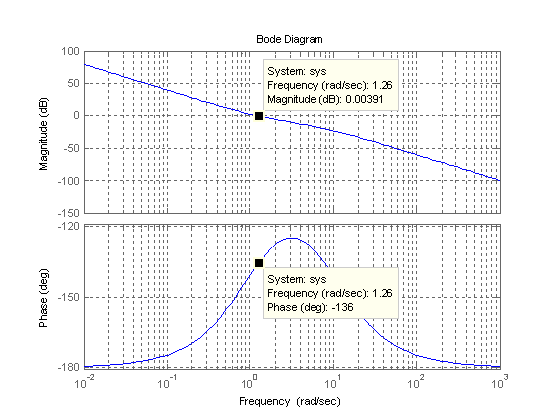
解:绘出系统伯德图,程序如下
num=[0 0 1 1];
den=[0.1 1 0 0];
w=logspace(-2,3,100);
bode(num,den,w)
[gm,pm,wcg,wcp]=margin(num,den);
gm,pm,wcg,wcp
grid
gm =
0
pm =
44.4594
wcg =
0
wcp =
1.2647
分析: 系统截止频率Wc=1.2647,相角裕度r=44.4594,幅值裕度hg=0,穿越频率Wg=0
因此系统稳定。
三.实验结果及分析
四.实验心得与体会
总结:通过这次实验,我掌握了各种图形的matlab绘制方法,加深了对课本上各种稳定性判别方法的理解,学会了用软件作图判定系统稳定性,进一步了解了各种系统参数对系统性能的影响。
第二篇:自动控制原理-线性系统的频域分析实验报告
自动调节系统频域分析
班级 11081801
学号 1108180135
姓名 王佳炜
日期 2014.1.5
线性系统的频域分析
一、实验目的
1.掌握用MATLAB语句绘制各种频域曲线。
2.掌握控制系统的频域分析方法。
二、实验内容
1.典型二阶系统
绘制出 ,
, ,0.3,0.5,0.8,2的bode图,记录并分析
,0.3,0.5,0.8,2的bode图,记录并分析 对系统bode图的影响。
对系统bode图的影响。
解:
程序如下:
num=[0 0 36];den1=[1 1.2 36];den2=[1 3.6 36];
den3=[1 6 36];den4=[1 9.6 36];den5=[1 24 36];
w=logspace(-2,3,100);
bode(num,den1,w)
grid
hold
bode(num,den2,w)
bode(num,den3,w)
bode(num,den4,w)
bode(num,den5,w)
分析:随着 的增大,伯德图在穿越频率处的尖峰越明显,此处用渐近线代替时误差越大.
的增大,伯德图在穿越频率处的尖峰越明显,此处用渐近线代替时误差越大.
2.系统的开环传递函数为

绘制系统的Nyquist曲线、Bode图,说明系统的稳定性,并通过绘制阶跃响应曲线验证。
解: 程序如下
奈氏曲线:
(1) num1=[0,0,10];den1=conv([1,0],conv([1,0],conv([5,-1],[1,5])));
w=logspace(-1,1,100);
nyquist(num1,den1,w)
(2) num2=[8,8];den2=conv([1,0],conv([1,0],conv([1,15],[1,6,10])));
w=logspace(-1,1,100);
nyquist(num2,den2)
(3) num3=[4/3,4];den3=conv([1,0],conv([0.02,1],conv([0.05,1],[0.1,1])));
w=logspace(-1,1,100);
nyquist(num3,den3)
分析:系统1,2 不稳定,系统3稳定。
伯德图:
num1=[0,0,10];den1=conv([1,0],conv([1,0],conv([5,-1],[1,5])));
num2=[8,8];den2=conv([1,0],conv([1,0],conv([1,15],[1,6,10])));
num3=[4/3,4];den3=conv([1,0],conv([0.02,1],conv([0.05,1],[0.1,1])));
bode(num1,den1)
grid
hold
bode(num2,den2)
bode(num3,den3)
分析:系统1,2 不稳定,系统3稳定。
。
阶跃响应曲线
(1)num1=[0,0,10];den1=conv([1,0],conv([1,0],conv([5,-1],[1,5])));
step(num1,den1)
grid
(2) num2=[8,8];den2=conv([1,0],conv([1,0],conv([1,15],[1,6,10])));
step(num2,den2)
grid
(3) num3=[4/3,4];den3=conv([1,0],conv([0.02,1],conv([0.05,1],[0.1,1])));
step(num3,den3)
grid
3.已知系统的开环传递函数为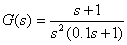 。求系统的开环截止频率、穿越频率、幅值裕度和相位裕度。应用频率稳定判据判定系统的稳定性。
。求系统的开环截止频率、穿越频率、幅值裕度和相位裕度。应用频率稳定判据判定系统的稳定性。
解:绘出系统伯德图,程序如下
num=[0 0 1 1];
den=[0.1 1 0 0];
w=logspace(-2,3,100);
bode(num,den,w)
[gm,pm,wcg,wcp]=margin(num,den);
gm,pm,wcg,wcp
grid

gm =0
pm =44.4594
wcg =0
wcp =1.2647
分析: 系统截止频率Wc=1.2647,相角裕度r=44.4594,幅值裕度hg=0,穿越频率Wg=0
因此系统稳定。
三.实验心得与体会
总结:通过这次实验,我掌握了各种图形的matlab绘制方法,加深了对课本上各种稳定性判别方法的理解,学会了用软件作图判定系统稳定性,进一步了解了各种系统参数对系统性能的影响。