自动控制原理
实验报告
姓名 学号
时间 地点 实验楼B
院系 专业
实验一 系统的数学模
实验二 控制系统的时域分析
实验三 控制系统的频域分析
实验一 系统的数学模
一、实验目的和任务
1、 学会使用MATLAB的命令;
2、 掌握MATLAB有关传递函数求取及其零、极点计算的函数。
3、 掌握用MATLAB 求取系统的数学模型
二、实验仪器、设备及材料
1、 计算机
2、 MATLAB软件
三、实验原理
1、 MATLAB软件的使用
2、 使用MATLAB软件在计算机上求取系统的传递函数
四、实验内容
1、 特征多项式的建立与特征根的求取
在命令窗口依次运行下面命令,并记录各命令运行后结果
>>p=[1,3,0,4];
p =
1 3 0 4
>>r=roots(p)
r =
-3.3553 + 0.0000i
0.1777 + 1.0773i
0.1777 - 1.0773i
>>p=poly(r)
p =
1.0000 3.0000 -0.0000 4.0000
2、 求单位反馈系统的传递函数:
在命令窗口依次运行下面命令,并记录各命令运行后结果
>>numg=[1];deng=[500,0,0];
>>numc=[1,1];denc=[1,2];
>>[num1,den1]=series(numg,deng,numc,denc);
>>[num,den]=cloop(num1,den1,-1)
num =
0 0 1 1
den =
500 1000 1 1
>>printsys(num,den)
num/den =
s + 1
---------------------------
500 s^3 + 1000 s^2 + s + 1
3、 传递函数零、极点的求取
在命令窗口依次运行下面命令,并记录各命令运行后结果
>>num1=[6,0,1];den1=[1,3,3,1];
>>z=roots(num1) ;
>>p=roots(den1) ;
>>n1=[1,1];n2=[1,2];d1=[1,2*i];d2=[1,-2*i];d3=[1,3];
>>num2=conv(n1,n2)
num2 =
1 3 2
>>den2=conv(d1,conv(d2,d3))
den2 =
1 3 4 12
>>printsys(num2,den2)
s^2 + 3 s + 2
----------------------
s^3 + 3 s^2 + 4 s + 12
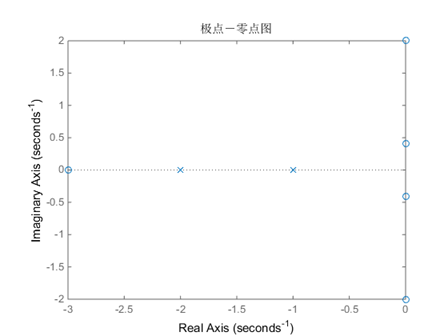
>>num=conv(num1,den2);den=conv(den1,num2);
>>printsys(num,den)
6 s^5 + 18 s^4 + 25 s^3 + 75 s^2 + 4 s + 12
-------------------------------------------
s^5 + 6 s^4 + 14 s^3 + 16 s^2 + 9 s + 2
>>pzmap(num,den),title(‘极点-零点图’)
4、 求反馈联接系统的传递函数:
在命令窗口依次运行下面命令,并记录各命令运行后结果
>>numg=[1];deng=[500,0,0];
>>numh=[1,1];denh=[1,2];
>>[num,den]=feedback(numg,deng,numh,denh)
num =
0 0 1 2
den =
500 1000 1 1
>>printsys(num,den)
s + 2
---------------------------
500 s^3 + 1000 s^2 + s + 1
5、 自行利用MATLAB命令求取以下系统传递函数,并记录下结果。
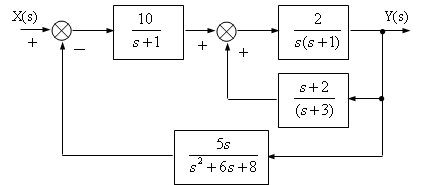
>> g1=tf(2,[1,1,0]);
>> g2=tf([1,2],[1,3]);
>> gg1=feedback(g1,g2,+1);
>> g3=tf(10,[1,1]);
>> gg2=series(gg1,g3);
>> g4=tf([5,0],[1,6,8]);
>> sys=feedback(gg2,g4)
sys =
20 s^3 + 180 s^2 + 520 s + 480
-----------------------------------------------------
s^6 + 11 s^5 + 43 s^4 + 67 s^3 + 118 s^2 + 252 s - 32
Continuous-time transfer function.
五、思考题
1、 实验内容中的第5项系统的反馈是什么反馈?
有正反馈和负反馈。
2、 闭环系统的零、极点个数相等吗?各为多少?
不等。
>> pzmap(sys)
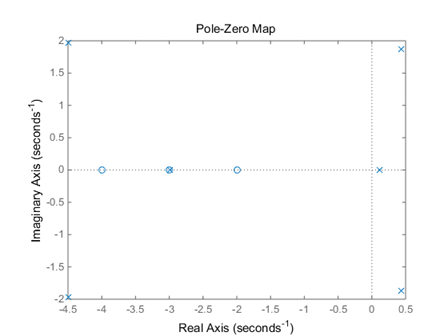
>> [p,z]=pzmap(sys)
p =
-4.4999 + 1.9707i
-4.4999 - 1.9707i
-2.9863 + 0.0000i
0.4332 + 1.8760i
0.4332 - 1.8760i
0.1198 + 0.0000i
z =
-4.0000
-3.0000
-2.0000
实验二 控制系统的时域分析
一、实验目的和任务
1、 掌握用MATLAB对系统进行时间响应分析;
2、 掌握一阶惯性系统以及二阶系统的时间响应特征以及系统性能与系统参数之间的关系。
二、实验仪器、设备及材料
1、 计算机
2、 MATLAB软件
三、实验原理
1、 利用计算机对控制系统进行时域分析。
2、 使用MATLAB软件在计算机上对一、二阶系统进行时域分析。
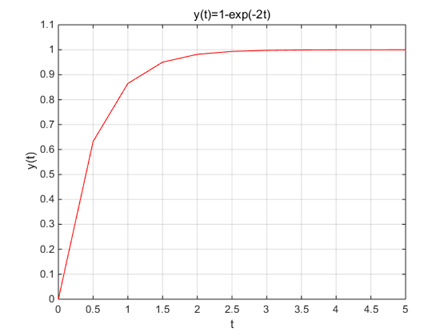
1. 使用MATLAB求一阶惯性系统的单位阶跃响应曲线。系统传递函数如下:
在命令窗口依次运行下面命令,并记录各命令运行后结果
>>t=[0:.5:5];
>>y=1-exp(-2*t);
>>plot(t,y,’r’);
>>axis([0 5 0 1.1]);
>>set(gca,’ytick’,0:.1:1.1);
>>title(‘y(t)=1-exp(-2t)’);
>>xlabel('t');
>>ylabel('y(t)');
>>grid
若系统传递函数为:

自行编制在命令窗口运行命令,求其单位阶跃响应,并与上面的结果进行比较,把结论写入实验报告。
>> y=1-exp(-1*t);
>> plot(t,y,'r');
>> axis([0 5 0 1.1]);
>> set(gca,'ytick',0:.1:1.1);
>> title('y(t)=1-exp(-2t)');
>> xlabel('t');
>> ylabel('y(t)')
>> title('y(t)=1-exp(-1t)');
>> grid

比较结果,可得结论: T值的大小反映系统的惯性。T值小,惯性就小,响应速度快;T值大,响应速度慢。
2.使用MATLAB求二阶系统的单位阶跃响应曲线。系统传递函数如下:
 (其中:
(其中:
 从0变化到2)
从0变化到2)
在命令窗口如下运行命令,,并记录各命令运行后结果。
>>syms s
for zeta=[0:0.2:0.8,1:0.5:2]
wn=0.4;
wn=sym(num2str(wn));
zet=sym(num2str(zeta));
if zeta==0
figure(1)
ezplot(ilaplace(wn^2/s/(s^2+wn^2)),[0 80]);
grid on
title('\xi=0')
elseif zeta==1
figure(2)
ezplot(ilaplace(wn^2/s/(s+wn)^2),[0 80]);
hold on;
else
figure(2)
ezplot(ilaplace(wn^2/s/(s^2+2*zet*wn*s+wn^2)),[0 80]);
hold on;
end
end
grid on;
title('xi:0.2,0.4,0.6,0.8,1.0,1.5,2.0')
axis([0 80 0 1.8])
gtext('0.4')
gtext('1.0')
gtext('2.0')
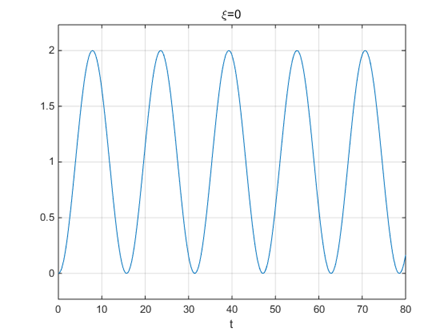
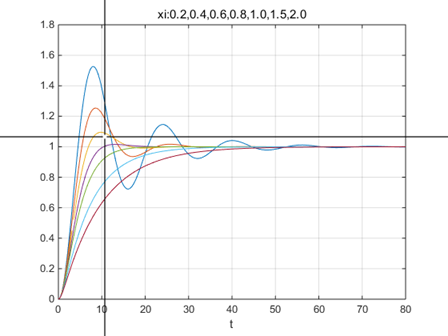
比较不同值系统的响应曲线,有何结论?
当t→∞时,振荡越来越小都趋向于1。
四、思考题
1、 一阶系统的时间常数T对系统阶跃响应的影响。
一阶系统的时间常数T越大,系统阶跃响应越慢。
2、 二阶系统阻尼比对系统阶跃响应的影响。
二阶系统阻尼比越大,系统阶跃响应越慢。
实验三 控制系统的频域分析
一、实验目的和任务
1、 利用MATLAB画一阶和二阶控制系统的伯德图
2、 利用MATLAB计算所给系统的相角裕量和幅值裕量
二、实验仪器、设备及材料
0、 计算机
1、 MATLAB软件
三、实验原理
0、 利用计算机对控制系统进行频域分析。
1、 使用MATLAB软件在计算机对系统进行频域分析。
四、实验步骤
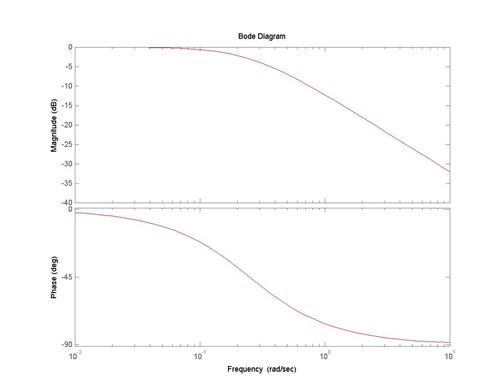
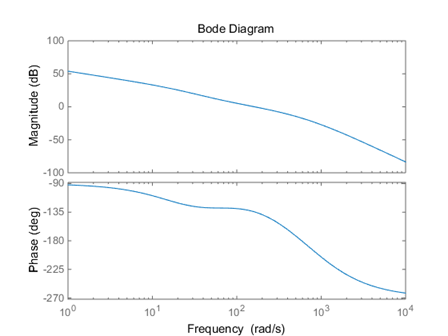
1、 使用MATLAB画一阶惯性系统的伯德图。
传递函数如下:


>> num=1;
>> den=[4 1];
>> g=tf(num,den);
>> bode(g,'r')
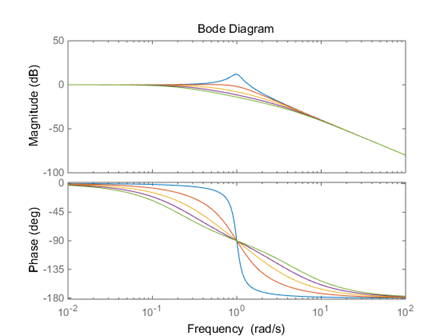
2、 使用MATLAB画二阶系统的伯德图。
传递函数如下:
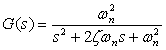
其中:

>> w=[0,logspace(-2,2,200)];
>> wn=0.8;
>> for zeta=[0.1 0.5 1 1.5 2];
G=tf([wn*wn],[wn^2 2*zeta*wn wn*wn]);
bode(G,w);
hold on;
End
3、 使用MATLAB画如下系统的伯德图并计算出系统的相角裕量和幅值裕量。
系统传递函数如下:

>> num=500*[0.0167 1];
>> den1=conv([1 0],[0.05 1]);
>> den2=conv([0.0025 1],[0.001 1]);
>> den=conv(den1,den2);
>> Go=tf(num,den);
>> w=logspace(0,4,50);
>> bode(Go,w)
margin(Go)
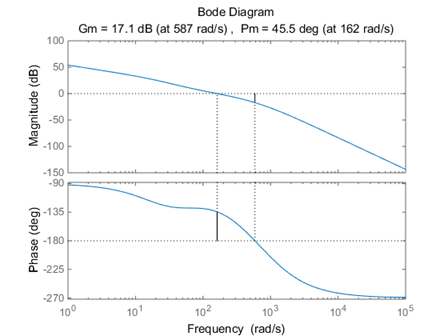
>> [Gm,Pm,Wcg,Wcp]=margin(Go)
Gm =
7.1968
Pm =
45.5298
Wcg =
586.6697
Wcp =
161.7414
五、思考题
1、 伯德图的横坐标是按什么刻度分度的?
伯德图横坐标是频率w按对数的分度,也就是lgw
2、 二阶系统阻尼比不同时对伯德图的影响。
用渐近线代替准确曲线,在ω=ωn附近导致的误差与有关。只有当=0.5时,误差才等于0;若在0.3~0.7之间,误差仍比较小,不超过3dB,所得曲线不必修正;若超过上述范围,则需修正。
3、 由相角裕量和幅值裕量判断所给系统是否稳定?
幅值裕度和相角裕度都大于0,闭环系统稳定。
第二篇:自动控制原理实验报告(1专业)五个实验
自动控制原理实验
专业
班级
姓名
学号
实验时间:20xx.10—20xx.11
一、
实验目的和要求:
通过自动控制原理实验牢固地掌握《自动控制原理》课的基本分析方法和实验测试手段。能应用运算放大器建立各种控制系统的数学模型,掌握系统校正的常用方法,掌握系统性能指标同系统结构和参数之间的基本关系。通过大量实验,提高动手、动脑、理论结合实际的能力,提高从事数据采集与调试的能力,为构建系统打下坚实的基础。
二、 实验仪器、设备(软、硬件)及仪器使用说明
自动控制实验系统 一套
计算机 (已安装虚拟测量软件---LABACT) 一台
椎体连接线 18根
典型环节实验
(一)、实验目的:
1、 了解相似性原理的基本概念。
2、 掌握用运算放大器构成各种常用的典型环节的方法。
3、 掌握各类典型环节的输入和输出时域关系及相应传递函数的表达形式,熟悉各典型环节的参数(K、T)。
4、 学会时域法测量典型环节参数的方法。
(二)、实验内容:
1、用运算放大器构成比例环节、惯性环节、积分环节、比例积分环节、比例微分环节和比例积分微分环节。
2、在阶跃输入信号作用下,记录各环节的输出波形,写出输入输出之间的时域数学关系。
3、在运算放大器上实现各环节的参数变化。
(三)、实验要求:
1、 仔细阅读自动控制实验装置布局图和计算机虚拟测量软件的使用说明书。
2、 做好预习,根据实验内容中的原理图及相应参数,写出其传递函数的表达式,并计算各典型环节的时域输出响应和相应参数(K、T)。
3、分别画出各典型环节的理论波形。
5、 输入阶跃信号,测量各典型环节的输入和输出波形及相关参数。
(四)、实验原理
实验原理及实验设计:
1. 比例环节: Ui-Uo的时域响应理论波形:
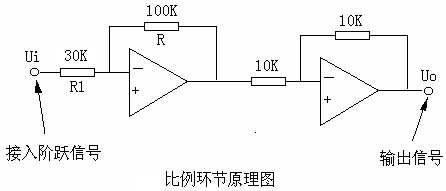
传递函数:
比例系数:
时域输出响应:
2. 惯性环节: Ui-Uo的时域响应理论波形:
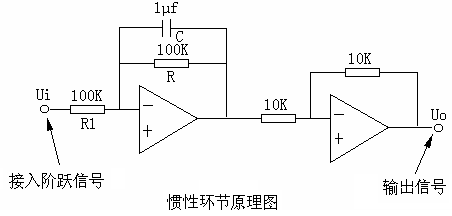
传递函数:
比例系数:
时常数:
时域输出响应:
3.积分环节: Ui-Uo的时域响应理论波形:
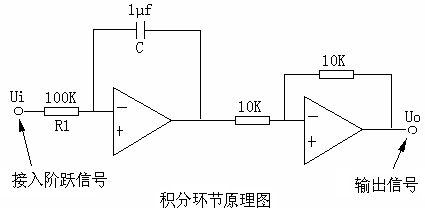
传递函数:
时常数:
时域输出响应:
4.比例积分环节: Ui-Uo的时域响应理论波形:
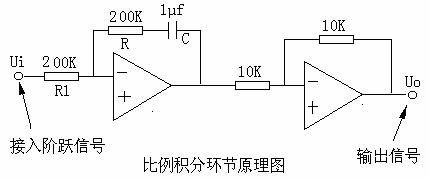
传递函数:
比例系数:
时常数:
时域输出响应:
5.比例微分环节: Ui-Uo的时域响应理论波形:
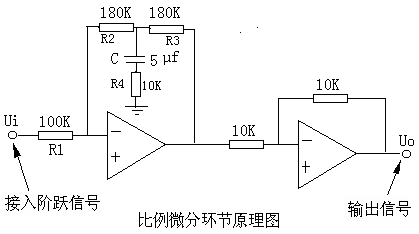
传递函数:
比例系数:
时常数:
时域输出响应:
6.比例积分微分环节: Ui-Uo的时域响应理论波形:
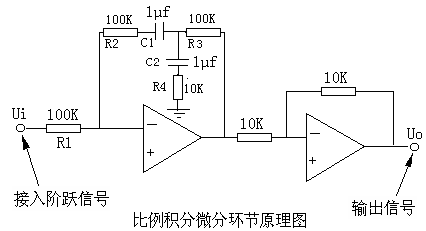
传递函数:
比例系数:
时常数:
时域输出响应:
(五)、实验方法与步骤
1、 根据原理图构造实验电路。
2、 测量输入和输出波形图。
3、 将所测得的数据填入实验数据表中。
(六)、讨论与思考
1、 写出各典型环节的微分方程(建立数学模型)。
2、 根据所描述的各典型环节的微分方程,你能否用电学、力学、热力学和机械学等学科中的知识设计出相应的系统?请举例说明,并画出原理图。
3、 利用MATLAB仿真,与实验中实测数据和波形相比较,分析其误差及产生的原因
(七)、记录实验数据和实测波形:
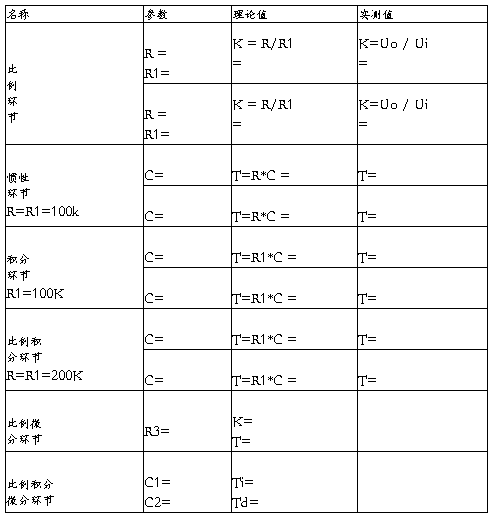
(八)、各典型环节的阶跃响应曲线:
(九)、讨论与思考
1、写出各典型环节的微分方程(建立数学模型)。
2、根据所描述的各典型环节的微分方程,你能否用电学、力学、热力学和机械学等学科中的知识设计出相应的系统?请举例说明,并画出原理图。
3、利用MATLAB仿真,与实验中实测数据和波形相比较,分析其误差及产生的原因。
实验二 二阶系统的性能研究
(一)、实验目的:
通过实验加深理解二阶系统的性能指标同系统参数的关系。
(二)、实验内容:
1、二阶系统的时域动态性能研究;
(三)、实验要求:
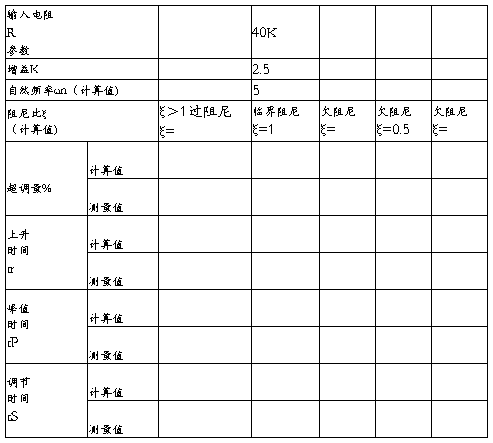
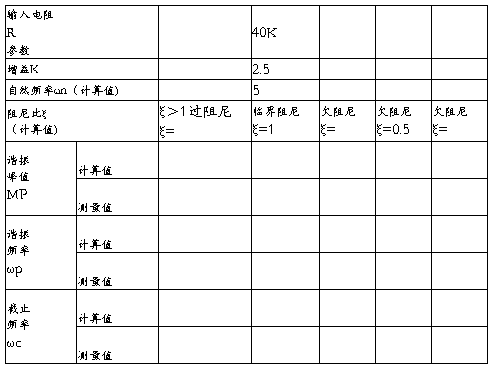
1、做好预习,根据实验原理图所示相应参数,写出系统的开环,闭环传递函数。计算、n、tr、ts、tp、%、等理论值,并绘制单位阶跃信号下的输出响应理论波形。
2、自己设计实验参数。
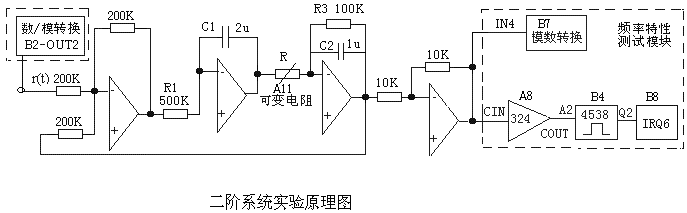
(四)、实验原理:
实验原理及实验设计:
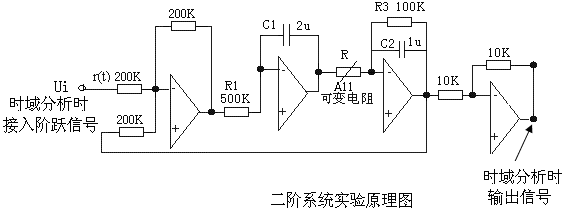
预习内容:(1) 二阶系统时域实验参数计算:
(五)、实验方法与步骤
1、根据原理图构造实验电路。
2、测量时域响应波形和数据。
3、将所测得的数据填入实验数据表中。
(六)、记录实验数据:
(七)、记录实验实测波形:
(八)、思考题:
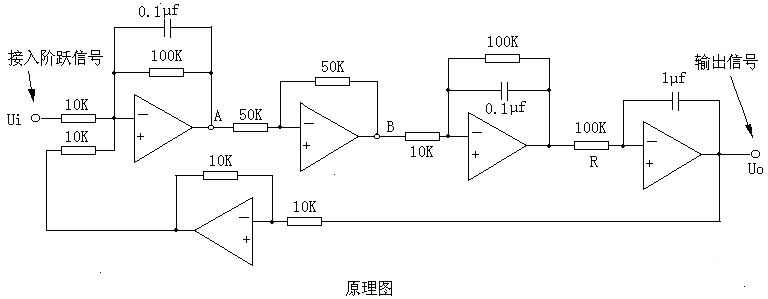
1、 在本实验中,系统能否出现不稳定的情况,此时电阻值R的取值范围?
2、 在系统不稳定的情况,你能否通过改变其它元器件参数,使系统变得稳定?改哪些参数?如何改?请分别列出,并加以分析。
3、 利用MATLAB仿真,与实验中实测数据和波形相比较,分析其误差及产生的原因。
实验三 系统时域分析实验
(一)、实验目的:
1、 深入掌握二阶系统的性能指标同系统闭环极点位置的关系。
2、 掌握高阶系统性能指标的估算方法及开环零、极点同闭环零、极点的关系。
3、能运用根轨迹分析法由开环零极点的位置确定闭环零极点的位置。
(二)、实验内容:
1、运用根轨迹法对控制系统进行分析;明确闭环零、极点的分布和系统阶跃响应的定性关系。
(三)、实验要求:
1、做好预习,根据原理图所示相应参数,计算理论值并绘制根轨图,用试探法确定主导极点的大致位置。
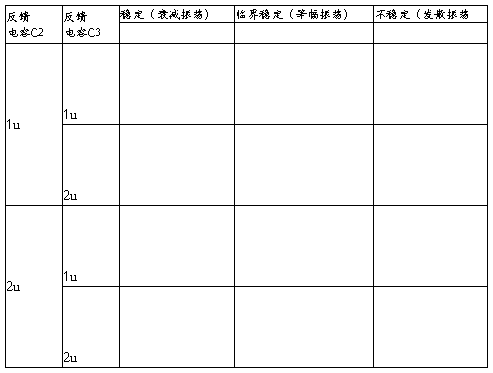
2、用Routh稳定判据,求出系统稳定、临界稳定和不稳定时的K值范围和R的取值。
3、画出输入输出的理论波形(单位阶跃信号作用下)。
(四)、实验原理:
1、根轨迹:当K由0→∞变化时,闭环特征根在S平面上移动的轨迹城根轨迹,不仅直观的表示了K 变化时间闭环特征根的变化,还给出了参数时闭环特征根在S平面上分布的影响。可判定系统的稳定性,确定系统的品质。
稳定性:根轨迹若越过虚轴进入s右半平面,与虚轴交点的k即为临界增益。
稳态性能:根据坐标原点的根数,确定系统的型别,同时可以确定对应的静态误差系数。
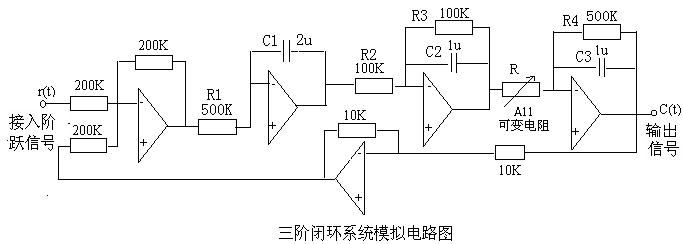
预习内容:(1) 三阶系统时域实验参数计算和根轨迹图:
(五)、实验方法与步骤
1、根据原理图构造实验电路。
2、测量时域响应波形和相应参数。
3、将所测得的数据填入实验数据表中。
(六)、记录实验数据:
(七)、记录实验实测波形:
(八)、思考题:
1、系统的性能指标不理想时,如何改变系统零、极点的位置使系统性能指标得到改善?在实际中是否可以无限制地改变系统零、极点的位置?请说明理由。
2、在本实验中,系统不稳定的情况下,不增加零点,而是通过改变其它零、极点的位置,能否使系统稳定?如果可以,如何改变?如果不能,为什么?
3、利用MATLAB仿真,与实验中实测数据和波形相比较,分析其误差及产生的原因。
4、利用MATLAB绘制根轨迹图。
实验四 二阶系统的性能频域研究
(一)、实验目的:
1、通过实验加深理解二阶系统的性能指标同系统参数的关系。
2、掌握系统频率特性测试方法。
3、研究二阶系统频率特性与系统动态性能之间的关系。
(二)、实验内容:
二阶系统的频域动态性能研究;
(三)、实验要求:
1、自己设计实验参数。
2、根据原理图所示相应参数,计算理论值MP 、ωp、ωB等理论值,并绘制幅频、相频和幅相特性图.
(四)、实验原理:
实验原理及实验设计:
预习内容:(1)、二阶系统的频域实验参数计算:
(五)、实验方法与步骤
1、根据原理图构造实验电路。
2、测量频域伯德图和奈奎斯特图。
3、将所测得的数据填入实验数据表中。
(六)、记录实验数据:
(七)、记录实验实测图形:
(八)、思考题:
1、 通过实验你有何心得体会,发现了什么问题,有何改进意见?
2、 利用MATLAB仿真,与实验中实测数据和波形相比较,分析其误差及产生的原因。
3、 利用MATLAB绘制波德图。
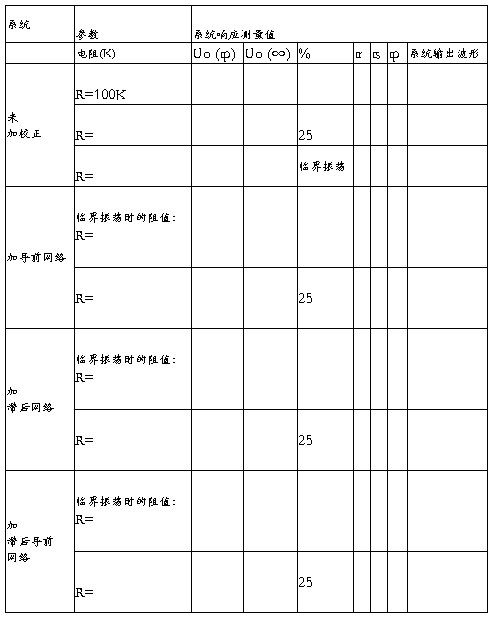
校正实验
(一)、实验目的:
1、掌握系统校正的两种基本方法的原理。
2、深入理解开环零、极点对闭环系统性能的影响关系。
3、加深理解串联校正(微分、积分、复合校正)和并联校正的特点,学会正确选择校正装置。
(二)、实验内容:
1、对与一个不稳定系统,分别储存加入导前网络、滞后网络、滞后-导前网络进行校正,然后比较其优劣性。
(三)、实验要求:
1、做好预习,根据原理图所示相应参数,写出原系统及校正后开环传递函数。
2、分析讨论三种串联校正网络使用场合和优缺点。
(四)、实验原理:
1、 导前网络 :
2、 滞后网络:
3、滞后-导前网络:
其中:


(五)、实验方法与步骤:
1、 根据原理图构造实验电路
 (六)、讨论与思考
(六)、讨论与思考
1、 比较相角超前校正网络与相角滞后校正网络(从目的、效果、优点、缺点、适用场合、不适用场合等几方面进行比较)?
2、 自行设计用作校正控制器的实用放大电路(PD、 PI 、PID)。
(七)、记录实验数据: