
自动控制原理
实验报告
姓名:李 槿
学号:10031168
班级:100321班
20##年12月8日
自动控制原理实验四
控制系统数字仿真
一、实验目的
通过本实验掌握利用四阶龙格-库塔法进行控制系统仿真的方法,并分析系统参数改变对系统性能的影响。
二、实验内容
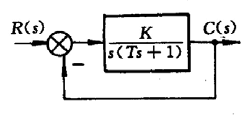
已知系统结构如图所示
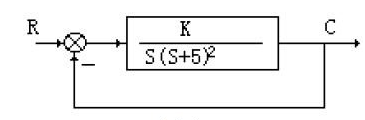
若输入为单位阶跃函数,计算当超调量分别为5%,25%,50%时K的取值(用主导极点方法估算),并根据确定的K值在计算机上进行数字仿真。
三、实验数据及处理
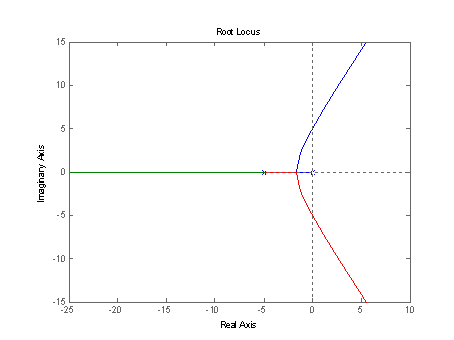
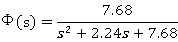
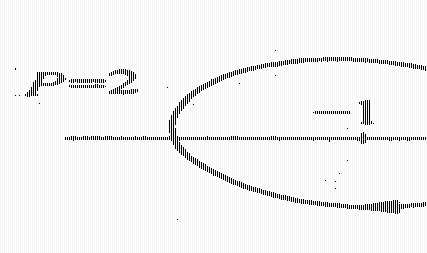
由系统特征方程 得系统根轨迹图
得系统根轨迹图
(1)当 时,即
时,即

得ζ= 0.69
所以
设主导极点
由 得
得

解得 

所以主导极点 
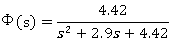
此时系统闭环传递函数近似为二阶系统,
仿真曲线:
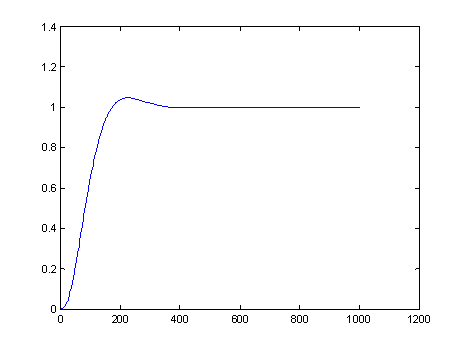
由图像得


(2)当 时,由(1)步得ζ= 0.40
时,由(1)步得ζ= 0.40
所以
故设主导极点
由得

解得 

主导极点 
此时系统闭环传递函数
所以

仿真曲线:
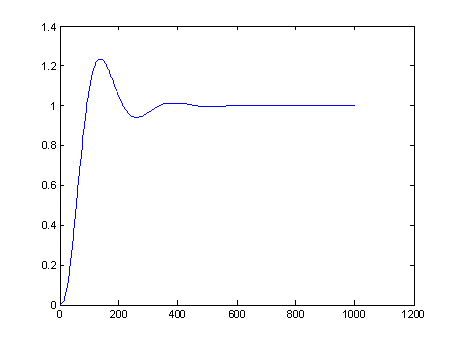
由仿真结果得


(3) 当 时由(1)得ζ= 0.22
时由(1)得ζ= 0.22
所以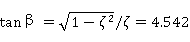
故设主导极点
带入中,即

解得 

主导极点 
此时系统闭环传递函数近似为二阶系统,
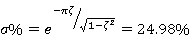
二阶系统在单位节约信号作用下的性能指标:

仿真曲线:
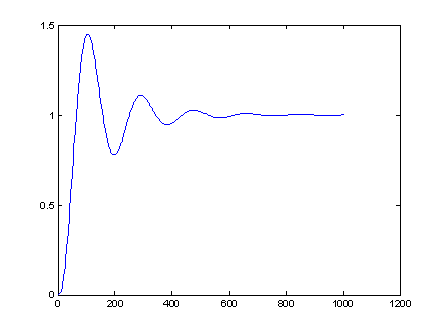
由图像得


四、实验程序
K=input('K=')
h=input('h=')
m=input('m=')
N=input('N=')
a3=K;a2=25;a1=10
A=[0,1,0;0,0,1;-a3,-a2,-a1];
b=[0;0;1];
c=[K,0,0];
x1=0;x2=0;x3=0;
X=[x1;x2;x3];
i=0;j=0;t=0;y=0;
disp(Y);
plot(t,Y);
hold on;
while i<=N
while j^=m
i=i+1;
j=j+1;
t=t+h;
u=1;
K1=A*X+b*u;
K2=A*(X+(h/2)*K1)+b*u;
K3=A*(X+(h/2)*K2)+b*u;
K4=A*(X+h*K3)+b*u;
X=X+(h/6)*[K1+2*K2+2*K3+K4];
end;
Y=c*X;
plot(t,Y);
hold on;
j=0;
end;
hold off;
第二篇:北航自动控制原理试题20xx年
《自动控制原理B》补考试卷
(3815大班,2011.3)
班级/学号 姓名 成绩
注意:1.如装订散开,在每张考题纸上把班级、学号、姓名填写清楚
2.认真审题,用钢笔或圆珠笔答题,作图可用铅笔,字迹清晰
3.所有答案都写在考题纸上,中间过程要完备(草稿纸另发)
一、填空题………………………………………………………………………………………………( 30 分)
1. 试写出超前、滞后控制校正装置的传递函数。超前校正Gc(s)=_________________;
基于频率法校正,超前控制校正装置主要滞后校正Gc(s)=____________________;
作用是_________________________________;滞后控制校正装置主要作用是_______________________________。
2. 单位负反馈系统的闭环传递函数为位斜坡函数输入的稳态误差为零。
3. 闭环系统传递函数Φ(s)Y(s)Ks+b(a, b为正数),K=______时,系统对单=2Rss+as+b10,则可近似得到其性能指标σ%=___(s+0.5)(s+20)(0.01s2+0.08s+1)
10(2.2s+1),则σ%=2(s+0.5)(s+20)(0.01s+0.08s+1)_____, ts=____________;若Φ(s)_______________ ts =_______________。
1e+e4. 某系统的单位阶跃响应为c(t)=??t?2t?e?4t,系统的频率特性为______________
_______________________________。
5. 下图给出系统开环的Nyquist图,试用奈氏稳定判据判断其对应的闭环系统的稳定性(图中P为开环系统正实部特征根的数目)。
A:_________ B:________ C:________
二、已知单位负反馈系统的开环传递函数为G(s)=2?(0)=0。试求闭环,且初始条件为c(0)=?1,cs(s+3)
系统的单位阶跃响应。…………………………………………………………………………………( 10
分
) 1
三、系统微分方程如下:………………………………………………………………………………( 15 分)
x1(t)=r(t)?c(t)+Knn(t)
x2=(t)=K1x1(t)
x3(t)=x2(t)?n(t)?τ
Tdx4(t)=x3(t)dt
dc(t)x4(t)?c(t)dtdc(t) dt
式中 r(t)——给定输入信号;n(t)——扰动量;c(t)——输出量;K1,Kn,T,τ——常数。
(1) 画出系统的动态结构图;………………………………………………………………………( 5 分)
(2) 求系统的传递函数C(s)/R(s)及C(s)/N(s);………………………………………… ( 5 分)
(3) 试确定使系统输出量不受扰动影响时的Kn值。…………………………………………… ( 5 分)

2
四、已知单位负反馈系统的开环传递函数为……………………………………………………… ( 20 分)
G(s)=K ss+1s+5(1) 概略地画出系统的根轨迹图(要求画出渐进线与实轴的交角和交点);………………… ( 5 分)
(2) 当K为何值时,系统是稳定的;……………………………………………………………… ( 5 分)
……………………………… ( 5 分) (3) 令K=10 ,概略地画出系统的Bode图(在下图所示坐标上);
(4) 在 Bode图上标出相角裕量 γ 和幅值裕量 h 。………………………………………… ( 5 分) 3
=
五、已知在正弦输入信号r(t)=sin10t作用下,如图所示系统的稳态响应……………………… ( 10 分)
π??css(t)sin?10t?? 2??
(1) 计算参数K,T值;…………………………………………………………………………… ( 5 分)
。……………………… ( 5 分) (2) 求该系统单位阶跃响应的超调量σ%和调节时间ts(?=±5%)
4
六、设单位反馈系统开环传递函数G(s)=
(1)γ≥45°;
(2)在单位斜坡作用下ess≤1/15。………………………………………………………………… ( 15 分) K,试设计串联超前校正装置,满足 s(s+1) 5