成绩
北 京 航 空 航 天 大 学
自动控制原理实验报告

学 院能源与动力工程学院
专业方向 飞行器动力工程
班 级 1204
学 号
学生姓名 y
指导教师
自动控制与测试教学实验中心
实验三 控制系统的串联校正
实验时间2104.12.10 实验编号 同组同学 无
…… …… 余下全文
成绩
北 京 航 空 航 天 大 学
自动控制原理实验报告
学 院能源与动力工程学院
专业方向 飞行器动力工程
班 级 1204
学 号
学生姓名 y
指导教师
自动控制与测试教学实验中心
实验三 控制系统的串联校正
实验时间2104.12.10 实验编号 同组同学 无
…… …… 余下全文

自动控制原理
实验报告
姓名:李 槿
学号:10031168
班级:100321班
20##年12月8日
自动控制原理实验四
控制系统数字仿真
一、实验目的
通过本实验掌握利用四阶龙格-库塔法进行控制系统仿真的方法,并分析系统参数改变对系统性能的影响。
二、实验内容
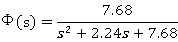
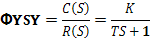
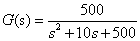
已知系统结构如图所示
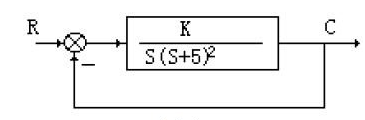
若输入为单位阶跃函数,计算当超调量分别为5%,25%,50%时K的取值(用主导极点方法估算),并根据确定的K值在计算机上进行数字仿真。
三、实验数据及处理
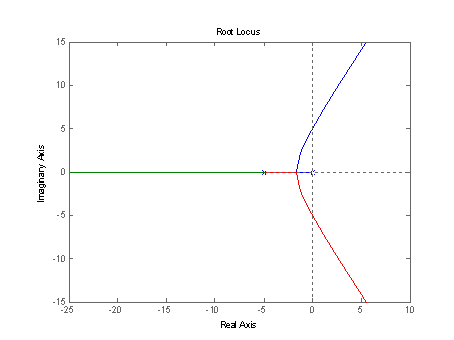
由系统特征方程 得系统根轨迹图
得系统根轨迹图
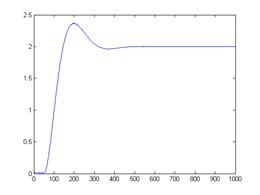
(1)当 时,即
时,即

得ζ= 0.69
所以
设主导极点
由 得
得

解得 

所以主导极点 
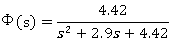
此时系统闭环传递函数近似为二阶系统,
仿真曲线:
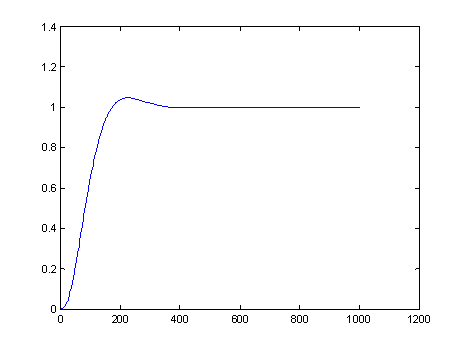
由图像得


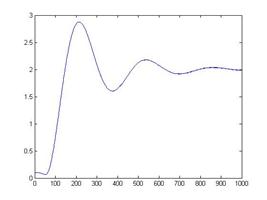
(2)当 时,由(1)步得ζ= 0.40
时,由(1)步得ζ= 0.40
所以
故设主导极点
由得

解得 

主导极点 
此时系统闭环传递函数
所以

仿真曲线:
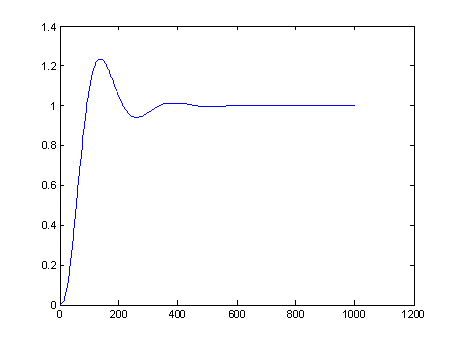
由仿真结果得


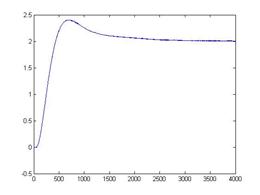
(3) 当 时由(1)得ζ= 0.22
时由(1)得ζ= 0.22
所以
故设主导极点
带入中,即

解得 

主导极点 
此时系统闭环传递函数近似为二阶系统,
二阶系统在单位节约信号作用下的性能指标:

仿真曲线:
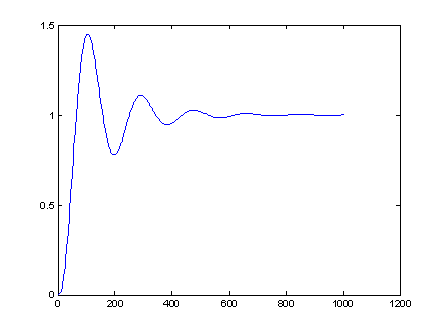
由图像得


四、实验程序
K=input('K=')
h=input('h=')
m=input('m=')
N=input('N=')
a3=K;a2=25;a1=10
A=[0,1,0;0,0,1;-a3,-a2,-a1];
b=[0;0;1];
c=[K,0,0];
…… …… 余下全文
实验三 控制系统串联校正
一、 实验目的
1、了解和掌握串联校正的分析和设计方法。
2、研究串联校正环节对系统稳定性及过渡过程的影响。
二、 实验内容
1、设计串联超前校正,并验证。
2. 设计串联滞后校正,并验证。
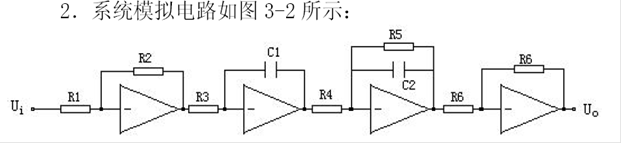
三、 实验原理

其中Gc(s)为校正环节,可放置在系统模型中来实现,也可使用模拟电路的方式由模拟机实现。
 3.未加校正时, 。
3.未加校正时, 。
4.加串联超前校正时, ,
,
给定 ,则
,则 。
。
5.加串联滞后校正时,
给定 ,则
,则 。
。
四、实验数据
1.未加校正 σ%=45.07 ts=6.007
2.加超前校正σ%=21.988 ts=2.406
3.加滞后校正:σ%=19.46 ts=14.55
五、实验结果图
(1)未校正

(2)超前校正
六、数据分析
时域角度,超前和滞后都减少了系统的超调量,使得过渡过程变得较为平稳。滞后校正增加了系统的调节时间,过渡过程变慢,系统响应变得迟钝;超前校正减少了调节时间,过渡过程变快,系统响应变得迅速。
从频域角度看,超前校正和滞后校正都增大了系统的相稳定裕度,系统稳定性增强。
11091061 章学丰
…… …… 余下全文
12231034 姜峰
一、二阶系统的电子模拟及时域响应的动态测试
1、了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系
2、学习在电子模拟机上建立典型环节系统模型的方法
1、建立一阶系统的电子模型,观测并记录在不同时间常数T时的响应曲线,测定过渡过程时间Ts
2、建立二阶系统电子模型,观测并记录不同阻尼比 的响应曲线,并测定超调量
的响应曲线,并测定超调量 及过渡过程时间Ts
及过渡过程时间Ts
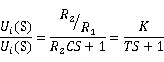
系统传递函数:
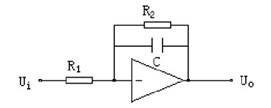
由电路图可得,
取
则K=1
分别取
T=0.25, 0.5, 1

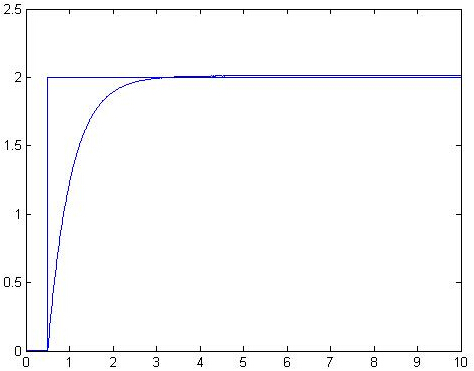 图1.1
图1.1
图1.2

图1.3
误差计算
当T=0.2时
当T=0.5时
当T=1.0时
误差分析
由于T决定响应参数,
而
在实验中R、C的取值上可能存在一定误差。
另外,导线的连接上也存在一些误差以及干扰,使实验结果与理论值之间存在一定误差。但是本实验误差在较小范围内,响应曲线也反映了预期要求,所以本实验基本得到了预期结果。
由本实验结果可看出,一阶系统阶跃响应是单调上升的指数曲线,特征有T确定,T越小,过度过程进行得越快,系统的快速性越好。
系统传递函数

令

二阶系统模拟线路
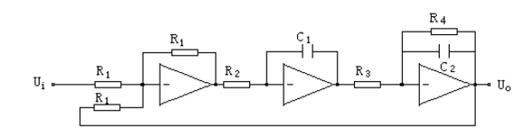
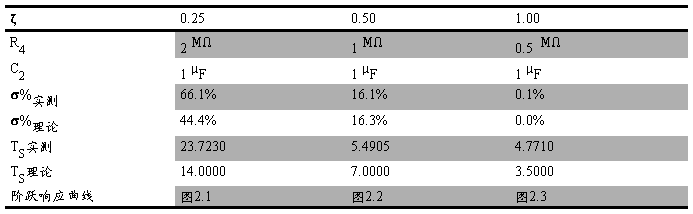
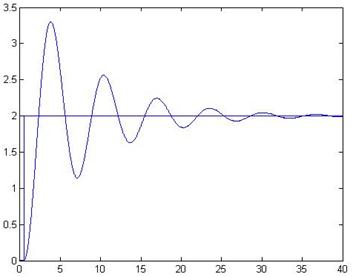
图2.1
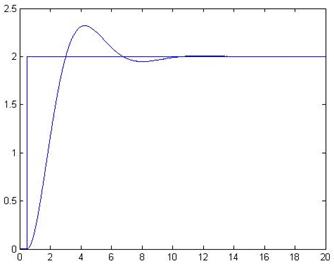
图2.2

图2.3
误差计算
当ξ=0.25时


当ξ=0.50时


当ξ=1.00时


误差分析
由于本试验中,用的参量比较多,有R1,R2,R3,R4;C1,C2;在它们的取值的实际调节中不免出现一些误差,误差再累加,导致最终结果出现了比较大的误差,另外,此实验用的导线要多一点,干扰和导线的传到误差也给实验结果造成了一定误差。但是在观察响应曲线方面,这些误差并不影响,这些曲线仍旧体现了它们本身应具有的特点,通过比较它们完全能够了解阶跃响应及其性能指标与系统参数之间的关系,不影响预期的效果。
…… …… 余下全文
成绩
北 京 航 空 航 天 大 学
自动控制原理实验报告

学 院航空科学与工程学院
专业方向 气动设计
班 级 120516
学 号 12051255
学生姓名 易晨炘
指导教师 张军香
自动控制与测试教学实验中心
实验三 控制系统串联校正
实验时间2014.12.16 实验编号 18 同组同学 无
一、实验目的
1、了解和掌握串联校正的分析和设计方法。
2、研究串联校正环节对系统稳定性及过渡过程的影响。
二、实验内容
1、设计串联超前校正,并验证。
…… …… 余下全文
成绩
北 京 航 空 航 天 大 学
自动控制原理实验报告

班 级 120228
学 号 12021191
学生姓名 黄钟胤
自动控制与测试教学实验中心
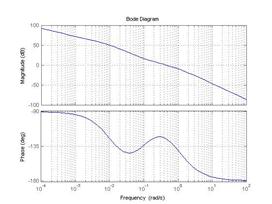
实验二 频率响应测试
一、实验目的
1.掌握频率特性的测试原理及方法。
2.学习根据所测定出的系统的频率特性,确定系统传递函数的方法。
二、实验内容
1.测定给定环节的频率特性。系统模拟电路图及系统结构图分别如图2-1及图2-2。

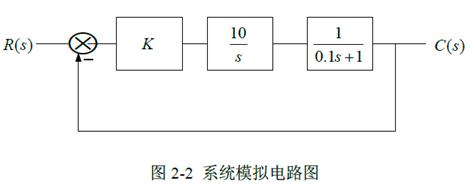
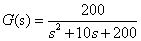
系统传递函数为:
取 ,则
,则 ,
, 
取 ,则
,则 ,
, 
若正弦输入信号为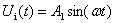 ,则当输出达到稳态时,其输出信号为
,则当输出达到稳态时,其输出信号为 。改变输入信号频率值
。改变输入信号频率值 ,便可测得二组
,便可测得二组 和
和 随
随 (或
(或 )变化的数值,这个变化规律就是系统的幅频特性和相频特性。
)变化的数值,这个变化规律就是系统的幅频特性和相频特性。
三、实验原理
1.幅频特性即测量输入与输出信号幅值 及
及 ,然后计算其比值。
,然后计算其比值。
2.实验采用“李沙育图形”法进行相频特性的测试。
3.相位差角的求法:对于 及
及 ,当
,当 时,有X(0)=0,
时,有X(0)=0, ;即
;即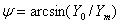 。显然,仅当
。显然,仅当 时,上式成立。
时,上式成立。
四、实验设备
1.HHMN-1型电子模拟机一台。
2.PC机一台。
3.数字式万用表一块。
五、实验步骤
1.熟悉HHMN-1型电子模拟机的使用方法。将各运算放大器接成比例器,通电调零。
2.断开电源,按照系统结构图和系统传递函数计算电阻和电容的取值,并按照模拟线路图搭接线路,不用的运算放大器接成比例器。
…… …… 余下全文
微机原理第一次实验报告
一、实验目的
1. 了解Keil uVision4.0集成开发环境的使用方法。
2. 掌握ARM7TDMI汇编指令的格式和用法,编写ARM汇编语言程序。
3. 完成调试教材第四章例子。
二、实验设备
PC计算机,Windows XP操作系统和ARM开发环境。
三、实验步骤
用Keil uVision4.0集成开发环境编译、调试汇编语言程序的大致步骤如下:
(1)运行软件,打开示例工程;
(2)编写或修改程序代码,一定要注意每个工程内只能包含一个源文件;
(3)点击“Build”编译工程,修改至无错误;
(4)单步调试程序,观察每一步的变量变化情况和最终结果,并思考每一步的结果与预期结果是否相同。
四、实验内容
1.例4-2
程序代码:
课本112-113页,其中有两处改动,一是存储结果的语句“ADD R0,0X4”改为“LDR R0,=Result”,因为程序运行时存储器的地址不确定,按书上的代码可能会取不到正确的地址;二是数据部分“Value DCB #0x59”改为“Value1 DCB 0x59”,应该属于书中印刷错误。
调试结果:
几个关键步骤执行后的变量值表示如下:

2.例4-5
程序代码:
课本116页,其中有一处改动,把数据段开始的语句“AREA Data1,DATA”向后移动两行或直接去掉,否则输出结果不正确。
调试结果:
几个关键步骤执行后的变量值表示如下:

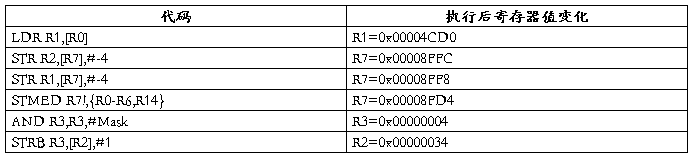
3.例4-11
程序代码:
课本124-125页,其中有几处类似于“LDR R0,[R7+#4]!”改为“LDR R0,[R7,#4]!”,同样把数据段开始的语句“AREA Data1,DATA”向后移动两行或直接去掉。
调试结果:
几个关键步骤执行后的变量值表示如下:
4.习题11
程序代码:
AREA Reset,CODE,READONLY
…… …… 余下全文
微机原理第二次实验报告
一、实验目的
1. 了解ARM汇编语言和C语言交互编程和调用的方法和机制。
2. 掌握汇编和C语言变量和函数调用时的规则和注意事项。
3. 掌握多个源文件构成工程项目的软件开发模式。
二、实验设备
PC计算机,Windows XP操作系统和Keil for ARM(MDK4.14)开发环境。
三、实验内容
1、汇编程序访问C程序变量
2、汇编程序调用C程序
3、C程序内嵌汇编指令
4、C程序调用汇编程序
四、实验步骤
1.汇编程序访问C程序变量
实验步骤:
(1)建立一个新的项目,一个汇编源文件 hello.s 和一个 C 语言文件 str.c,将这两个文件加入项目中。
(2)根据指导书中的参考代码和书中的相关例题输入代码。其中,hello.s文件要在参考代码的基础上添加引用其他文件中定义的变量的声明“IMPORT globvar”,并进行修改,删除“MOV PC,LR”一句。str.c文件中定义了全局变量globvar。
(3)项目属性设置:Debug选项卡去掉“Run to main()”,Linker选项卡勾选“Use Memory Layout from Target Dialog”。
(4)单步运行调试,将全局变量globvar加入观察窗口 1,并打开符号窗口查看 globvar的地址等信息。
调试结果:
程序段ARMCODE每运行一次,寄存器R0中的值从3开始增加2,观察窗口中globvar的值也增加2。
2.汇编程序调用C程序
实验步骤:
(1)建立一个新的项目,一个汇编源文件ARM_add.s和一个 C 语言文件C_add.c,将这两个文件加入项目中。
(2)根据参考代码编写程序。C_add.c中定义的函数g()实现5个整数的相加功能,汇编程序中则要设置5个参数的值并调用此段c代码完成5个整数的加法的功能。参数利用堆栈传递,根据ATPCS规则,使用R0,R1,R2和R3存放第1-4个参数,第5个参数则需利用数据栈传送。由于利用数据栈传递参数,在程序调用结束后要调整数据栈的指针。
…… …… 余下全文
