自动控制实验
实验五 线性定常系统的串联校正
姓名: 学号: 班级:
实验指导老师:__________________ 成绩:____________________
一、实验目的
1 对系统性能进行分析,选择合适的校正方式,设计校正器模型。
2 通过仿真实验,理解和验证所加校正装置的结构、特性和对系统性能的影响;
3 通过模拟实验部分进一步理解和验证设计和仿真的结果,进而掌握对系统的实时调试技术。
二、实验内容
1 对未加校正装置时系统的性能进行分析,根据性能要求进行校正器模型的理论设计
2 Matlab仿真
(1)观察校正前系统的时域、频域性能。
(2)观察校正后系统的时域、频域性能。
(3)对比1、2中结果分析校正器性能,在保证校正效果的前提下并根据实验台实际参数进行校正器模型调整。
3 模拟实验。
(1)搭接校正前的系统模拟电路。
(2)搭接校正器模拟电路
(3)验证是否满足设计要求。
三、实验数据或曲线
1 MATLAB仿真部分
选取实验题目三
系统模型
g0=tf([20],[1 1 0]);
Bode(g0)
gf=feedback(g0,1);
step(gf)
gc=tf([0.38 1],[0.05 1]);
g=g0*gc;
Bode(g0,g)
gcf=feedback(g,1);
step(gcf)
校正前系统伯德图

由图可知系统的性能不满足性能要求,考虑采用串联超前校正。
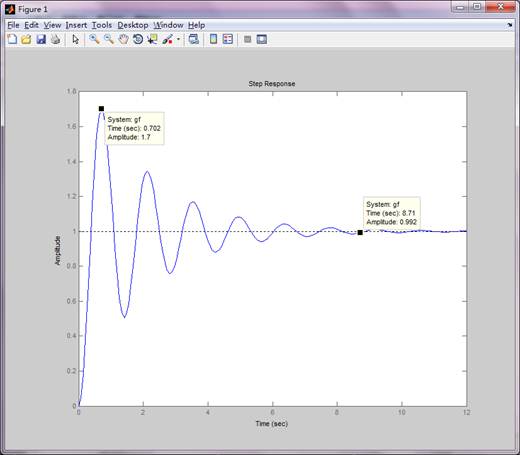
阶跃响应曲线
校正后系统的伯德图
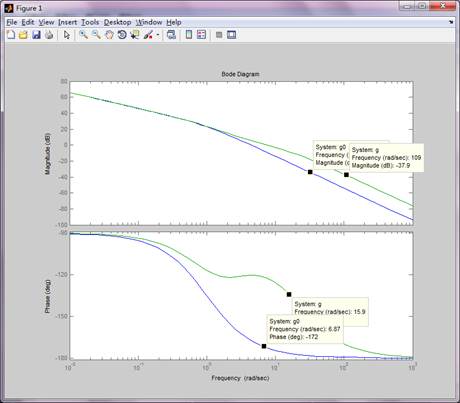
校正器模型(0.4s+1)/(0.05s+1),由图知系统的性能均满足性能要求,校正器模型合理。
校正后闭环系统的阶跃响应曲线

从校正前后系统的阶跃响应曲线上显示的参数可见,系统的性能得到了改善。
2 模拟部分
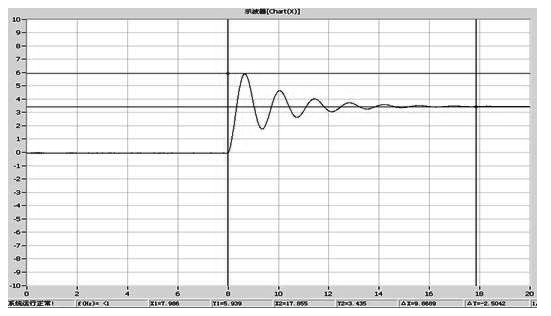
校正前系统的阶跃响应曲线
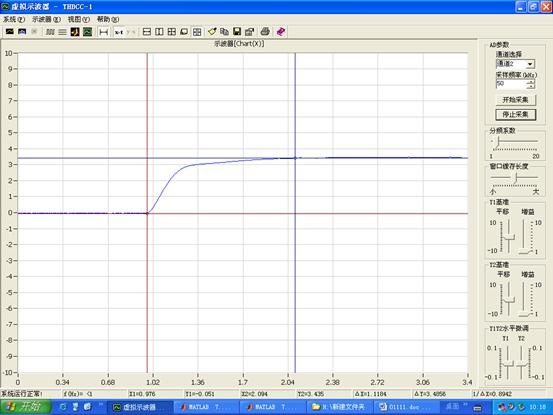
校正后系统的阶跃响应曲线
四、实验结论
控制系统设计的思路之一就是在原系统特性的基础上,对原特性加以校正,使之达到要求的性能指标。常用的串联校正装置有超前校正、滞后校正和超前滞后校正装置。本实验主要讨论在MATLAB环境下进行串联校正设计,然后通过用THBCC-1软件观察校正前后系统的阶跃响应,整个过程使得我们对校正方法有了更直观的认识。
第二篇:控制系统串联综合校正设计正文
前言
随着现代的科技不断发展,自动控制技术在众多领域中显得越来越重要。所谓自动控制,是指在没有人直接参与的情况下,利用控制装置或设备,使被控对象(机器、设备或生产过程等)的被控量(某个工作状态或参数)自动的按照预定的规律运行。在自动控制的各个环节之中校正是一个非常重要的环节,因此自动化专业的学生尤其要认真掌握好校正的原理、方式和方法。
根据被控对象及给定的技术指标要求设计自动控制系统,需要进行大量的分析计算。设计中需要考虑的问题是多方面的,既要保证所设计的系统有良好的性能,满足给定技术指标的要求;又要照顾到便于加工,经济性好,可靠性高。在设计过程中,既要有理论指导,也要重视实践经验,往往还要配合整体和局部的实验。
当被控对象给定后,按照被控对象的工作条件,被控信号应具有的最大速度和加速度要求等,可以初步选定执行元件的型式,特性和参数。然后,根据测量精度、抗扰能力、被测信号的物理性质、测量过程中的惯性及非线性度等因素,选择合适的测量变送元件。在此基础上,设计增益可调的前置放大器与功率放大器。这些初步选定的元件以及被控对象适当组合起来,使之满足控制精度、阻尼程度和响应速度的性能指标要求。如果通过调整放大器增益后仍然不能全面满足设计要求的性能指标,就需要在系统中增加一些校正装置。
所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,从而满足给定的各项性能指标。本设计研究线性定常控制系统的校正方法。校正的方法有多种,本设计中运用的是串联综合法校正方式。
1 系统校正中的基本问题
1.1 被控对象
被控对象和控制装置同时设计是比较合理的。充分发挥控制的作用,往往能使被控对象获得特殊的、良好的技术性能,甚至使复杂的被控对象得以改造而变得异常简单。某些生产过程的合理控制可以大大简化工艺设备。然而,相当多的场合还是先给定受控对象,之后进行系统设计。但无论如何,对受控对象作充分的了解是不容置疑的。要详细了解对象的工作原理和特点如哪些参量需要控制、哪些参量能够测量、可以通过哪几个机构进行调整、对象的工作环境和干扰如何,等等。还必须尽可能准确地掌握受控对象的动态数学模型,以及对象的性能要求,这些都是系统设计的主要依据。
1.2 性能指标
进行控制系统的校正设计,除了应已知不可变部分的特性与参数外,需要已知对系统提出的全部性能指标。性能指标通常是由使用单位或被控对象的设计制造单位提出的。不同的控制系统对性能指标的要求有不同的侧重。例如,调速系统对平稳性和稳态精度要求较高,而随动系统则侧重于快速性要求。一般校正系统的原理框图如图1-1所示
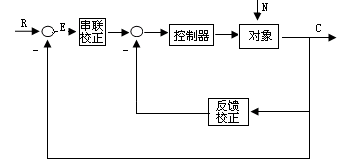
图1-1 校正系统的原理框图
性能指标的提出,应符合实际系统的需要与可能。一般说,性能指标不应当比完成给定任务所需要的指标更高。例如,若系统的主要要求是系统具备较高的稳态工作精度,则不必对系统的动态性能提出不必要的过高要求。实际系统能具备的各种性能指标,会受到组成元部件的固有误差、非线性特性、能源的功率以及机械强度等各种实际物理条件的制约。如果要求控制系统应具备较快的响应速度,则应考虑系统能够提供的最大速度及加速度,以及系统容许的强度极限。除了一般性指标外,具体系统往往还有一些特殊要求,如低速平稳性、对变载荷的适应性等,也必须在系统设计时分别加以考虑。
在控制系统设计中,采用的设计方法一般依据性能指标的形式而定。如果性能指标以单位阶跃响应的峰值时间、调节时间、超调量、阻尼比、稳态误差等时域特征量给出时,一般采用根轨迹法校正;如果性能指标以系统的相角裕度度、谐振峰值、闭环带宽、静态误差系数等频域特征量给出时,一般采用频率法校正。目前,工程技术界多采用频率法。
1.3 系统带宽的确定
性能指标中的带宽频率  的要求,是一项重要的技术指标。无论采用哪种校正方式,都要求校正后的系统既能以所需精度跟踪输入信号,又能抑制噪声扰动信号。在控制系统实际运行中,输入信号一般是低频信号,而噪声信号则一般是高频信号。因此,合理选择控制系统的带宽,在系统设计中是一个很重要的问题。
的要求,是一项重要的技术指标。无论采用哪种校正方式,都要求校正后的系统既能以所需精度跟踪输入信号,又能抑制噪声扰动信号。在控制系统实际运行中,输入信号一般是低频信号,而噪声信号则一般是高频信号。因此,合理选择控制系统的带宽,在系统设计中是一个很重要的问题。
显然,为了使系统能够准确复现输入信号,要求系统具有较大的带宽;然而从抑制噪声角度看,又不希望系统的带宽过大。此外,为了使系统具有较高的稳定裕度,希望系统开环对数幅频特性在截止频率 处的斜率为 -20dB/dec ,但从要求系统具有较强的从噪声中辨识信号的能力来考虑,却又希望 处的斜率小于-40dB/dec。由于不同的开环系统截止频率对应于不同的闭环系统带宽频率
处的斜率为 -20dB/dec ,但从要求系统具有较强的从噪声中辨识信号的能力来考虑,却又希望 处的斜率小于-40dB/dec。由于不同的开环系统截止频率对应于不同的闭环系统带宽频率 ,因此在系统设计时,必须选择切合实际的系统带宽。
,因此在系统设计时,必须选择切合实际的系统带宽。
通常,一个设计良好的实际运行系统,其相角裕度具有 左右的数值。过低于此值,系统的动态性能较差,且对数变化的适应能力较弱;过高于此值,意味着对整个系统及其组成部件要求太高,因此造成实现上的困难,或因此不满足经济性要求,同时由于稳定程度过好,造成系统动态过程缓慢。要实现左右的相角裕度要求,开环对数幅频特性在中频区的斜率应为 -20dB/dec,同时要求中频区占据一定的频率范围,以保证在系统参数变化时,相角裕度变化不大。过此中频区后,要求系统幅频特性迅速衰减,以削弱噪声对系统的影响。这是选择系统带宽应该考虑的一个方面。另一方面,进入系统输入端的信号,既有输入信号r(t),又有噪声信号n(t) ,如果输入信号的带宽为 0~
左右的数值。过低于此值,系统的动态性能较差,且对数变化的适应能力较弱;过高于此值,意味着对整个系统及其组成部件要求太高,因此造成实现上的困难,或因此不满足经济性要求,同时由于稳定程度过好,造成系统动态过程缓慢。要实现左右的相角裕度要求,开环对数幅频特性在中频区的斜率应为 -20dB/dec,同时要求中频区占据一定的频率范围,以保证在系统参数变化时,相角裕度变化不大。过此中频区后,要求系统幅频特性迅速衰减,以削弱噪声对系统的影响。这是选择系统带宽应该考虑的一个方面。另一方面,进入系统输入端的信号,既有输入信号r(t),又有噪声信号n(t) ,如果输入信号的带宽为 0~ ,噪声信号集中起作用的频带为
,噪声信号集中起作用的频带为 ,则控制系统的带宽频率通常取为
,则控制系统的带宽频率通常取为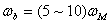 ,且使 处于0~范围之外,如图1-2所示。
,且使 处于0~范围之外,如图1-2所示。
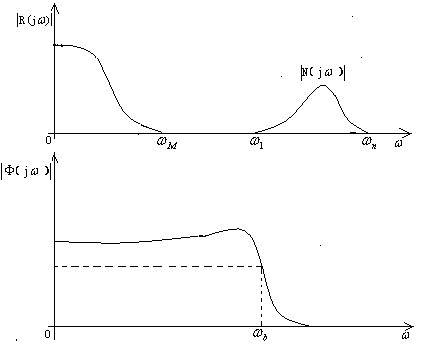
图1-2 系统带宽的确定
2 串联综合法校正原理
2.1 原理概述
综合校正方法将性能指标要求转化为期望开环对数幅频特性,再与待校正系统的开环对数幅频特性比较,从而确定校正装置的形式和参数。该方法适用于最小相位系统。
2.2 公式推导
从频率特性角度,校正装置的对数幅频特性为:
 (2-1)
(2-1)
其中, 是未校正系统的开环幅频特性;
是未校正系统的开环幅频特性; 是校正环节的对数幅频特性;L(
是校正环节的对数幅频特性;L( )是满足给定性能指标的期望开环对数幅频特性,即“期望特性”。 2.2.1 传递函数计算
)是满足给定性能指标的期望开环对数幅频特性,即“期望特性”。 2.2.1 传递函数计算
该系统开环频率特性为:
 (2-2)
(2-2)
根据性能指标要求,可以拟订参数规范化的开环期望对数幅频特性20 | ,则串联校正装置的对数幅频特性为:
| ,则串联校正装置的对数幅频特性为:
20 (2-3)
(2-3)
对于调节系统和随动系统,期望对数幅频渐近特性的一般形状如图2-1所示。
该图表示中频区斜率为-40~ -20~ -40(即2—1—2型)的对数幅频特性,相应的传递函数为:
 G(s)=
G(s)= (2-4)
(2-4)
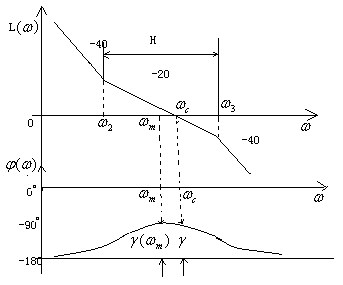
图2-1 期望特性
其相频率特性:
 (2-5)
(2-5)
因而
 (2-6)
(2-6)
由 ,解出产生
,解出产生 的角频率:
的角频率:
 (2-7)
(2-7)
表明 正好是交接频率
正好是交接频率 和
和 的几何中心。其中,
的几何中心。其中, 及
及 。
。
将式 (2-3)代入(2-2),并由两角和的三角公式,得:
 (2-8)
(2-8)
因而
 (2-9)
(2-9)
若令H= ,表示开环幅频特性
,表示开环幅频特性 上斜率为
上斜率为 的中频区宽度,则式(2-4)可以写为
的中频区宽度,则式(2-4)可以写为 (2-10)
(2-10)
2.2.2 相角裕度计算
下面分析最大相角裕度与截止频率的关系。由图2-2不难求出:
 (2-11)
(2-11)
若取 >1,如图2-2所示,可以算出:
>1,如图2-2所示,可以算出:
 (2-12)
(2-12)
图2-2 从等M图确定| |
|
因此有:
 ,
, >1 (2-13)
>1 (2-13)
上式说明, , 且通常有
, 且通常有  。所以,
。所以, ,故式(2-13)可近似表示为:
,故式(2-13)可近似表示为:
 (2-14)
(2-14)
其中, 为期望特性系统的相角裕度。由于
为期望特性系统的相角裕度。由于
 (2-15)
(2-15)
故有:
 (2-16)
(2-16)
上式表明,中频区宽度H与谐振峰值一样,均是描述系统阻尼程度的频域指标。
在图3-1中,交接频率 与截止频率的关系,可由式(2-8)(2-11)确定。将式(2-3)代入(2-8),得
与截止频率的关系,可由式(2-8)(2-11)确定。将式(2-3)代入(2-8),得
 (2-17)
(2-17)
再将式(2-11)及H=  代入上式,有:
代入上式,有:
 (2-18)
(2-18)
由式(2-13)及 ,得
,得
 (2-19)
(2-19)
因此有:
 (2-20)
(2-20)
为了保证系统具有以H表示的阻尼程度,通常选取
 (2-21)
(2-21)
 (2-22)
(2-22)
由式(2-11)知 ,
,
因此,参数 和的选择,若采用最小法,即把闭环系统的振荡指标放在开环系统截止频率处,使期望对数幅频特性对应的闭环系统具有最小的值,则各待选参数之间有如下关系:
 (2-23)
(2-23)
 (2-24)
(2-24)
2.3 总结求法
典型形式的期望对数幅频特性的求法如下:
1、根据对系统型别及稳态误差要求,通过性能指标中 及开环增益K,绘制期望特性的低频段。
及开环增益K,绘制期望特性的低频段。
2、根据对系统响应速度及阻尼程度要求,通过截止频率 、相角裕度 、中频区宽度H、中频区特性上下限交接频率 与 绘制期望特性的中频段,并取中频区特性的斜率为-20dB/dec,以确保系统有足够的相角裕度。
3、绘制期望特性低、中频段之间的衔接频段,其斜率一般与前、后频段相差-20dB/dec ,否则对期望特性的性能有较大影响。
4、根据对系统幅值裕度h(dB)及抑制高频噪声的要求,绘制期望特性的高频段。通常,为使校正装置比较简单,便于实现,一般使期望特性的高频段斜率与待校正系统的高频段斜率一致,或完全重合。
5、绘制期望特性的中、高频段之间的衔接频段,其斜率一般取-40dB/dec 。
利用期望特性方法进行串联综合法校正的设计步骤如下:
1、根据性能指标中的稳态性能要求,绘制满足稳态性能的待校正系统的对数幅频特性。
2、根据性能指标中稳态与动态性能指标,绘制对应的期望开环对数幅频特性 ,其低频段与低频段重合。
,其低频段与低频段重合。
3、由[ ] -,得串联校正装置对数幅频特性
] -,得串联校正装置对数幅频特性 。
。
4、验证校正后的系统是否满足给定性能指标要求,并对期望特性的交接频率值作必要的调整。
3 校正实例
3.1 设计要求
设单位反馈系统开环传递函数为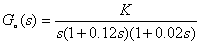
用串联综合校正方法设计串联校正装置,使系统满足: ,
, ,
, 。
。
3.2 设计步骤
1、取K=70,画待校正系统对数幅频特性| |dB,如图3-1所示。求得待校正
|dB,如图3-1所示。求得待校正
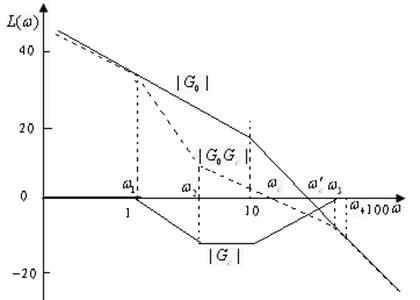
图3-1 系统特性
系统的截止频率 =24rad/s。
=24rad/s。
2、绘期望特性
低频段:I型系统,=1rad/s时,有:20lg| | =20lgK=36.9dB
| =20lgK=36.9dB
斜率为-20dB/dec,与20lg||的低频段重合。
中频及衔接段:由式 及
及 ,将
,将 及
及 转换为响应的频域指标,并取为=1.6,=13rad/s
转换为响应的频域指标,并取为=1.6,=13rad/s
按式(2-17)及(2-18)估算,应有 4.88rad/s,
4.88rad/s, 21.13rad/s
21.13rad/s
在=13rad/s处,作-20dB/dec斜率直线,交20lg||于=45rad/s处,见图3-1。取=4rad/s,=45rad/s。
此时,H=/=11.25。由式(2-9)知,相应的 。
。
在中频段与过=4rad/s的横轴垂线的交点上,作-40dB/dec斜率直线,交期望特性低频段于 =0.75rad/s处。
=0.75rad/s处。
高频及衔接段:在=45rad/s的横轴垂线与中频段的交点上,作斜率为-40dB/dec直线,交待校正系统的20lg||于 =50rad/s处;
=50rad/s处; 时,取期望特性高频段20lg||与待校正系统高频段特性20lg||一致。
时,取期望特性高频段20lg||与待校正系统高频段特性20lg||一致。
于是,期望特性的参数为:=0.75rad/s,=4rad/s,=45rad/s,=50rad/s, =13rad/s,H=11.25。
3、将| |与|
|与| |dB特性相减,得串联校正装置传递函数
|dB特性相减,得串联校正装置传递函数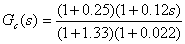 。
。
4、验算性能指标。校正后系统开环传递函数 。
。
直接算得:=13rad/s, ,=1.4,
,=1.4, ,
, 。完全满足设计要求。
。完全满足设计要求。
4 结论
串联综合法校正法,是根据给定的性能指标求出系统期望的开环频率特性,然后与未校正系统的频率特性进行比较,最后确定系统校正装置的形式及参数。这种方法主要的依据是期望特性。
串联综合法校正法的一般步骤如下:
1、绘制未校正系统的对数幅频特性曲线;
2、按要求设计指标绘制期望特性曲线L();
3、在伯德图上,由L()减去得串联校正环节的对数幅频特性曲线;
4、根据伯德图绘制规则,由写出相应的传递函数;
5、确定具体的校正装置及参数。
从以上步骤可看出此法关键是绘制期望特性。一般系统要求期望特性符合下列要求:
1、对数幅频特性的中频段为-20dB/dec,且有一定的宽度,以保证系统的稳定性;
2、截止频率尽可能大一些,以保证系统的快速性;
3、低频段具有较高的增益,以保证稳态精度;
4、高频段应衰减快,以保证抗干扰能力。
满足上述要求的模型很多,通常采取结构简单的模型。例如二阶,三阶模型等。
5 设计体会
通过本次的课程设计,使我受益非浅。在阅览室查了许多资料才明白,学会了理论知识并不意味着就能够应用到实际当中去,将理论应用到实际中才是我们学习理论知识的最终目的。在这个设计过程中,让我体会到了做一个课程设计和理论应用到实际中的难度。在阅览室的这几天里使我不仅学到了很多书本上的理论知识,更重要的是学会了利用阅览室查找资料,懂得了做课程设计的方法,为以后的毕业设计打下良好的基础。
致谢
本设计是在吴玺泽老师的悉心指导下完成的,老师渊博的知识,严谨的治学态度,一丝不苟的工作作风,平易近人的性格都是我学习的楷模。在论文的研究及整理期间,老师给了我很大的支持和鼓励,才使得论文得以顺利的完成,在此谨向老师表示忠心的感谢和崇高的敬意。
同时也感谢在设计期间给予我帮助的同学们,尤其是同寝室的历阳同学,没有他的热心帮助,这次设计便会变得困难许多。
参考文献
[1] 胡寿松.自动控制原理.北京:科学出版社.2001
[2] 李友善.自动控制原理.北京:国防工业出版社.1981
[3] 王划一.自动控制原理.北京:国防工业出版社.2001
[4] 薛定宇.反馈控制系统设计与分析.北京:清华大学出版社.2000
[5] 王万良.自动控制原理.北京:科学出版社.2001