静态拉伸法测弹性模量的误差分析
(东南大学 自动化学院,南京 211100 )
摘 要: 用Mathematica处理数据,得到一条拟合线。对实验过程中存在的系统误差,提出改进方法,减少实验误差。
关键词: 数据处理;系统误差;改进方法
Analysis on the Result Error s of Measuring Elastic Modulus by Static Stretching Method
(College of Automation, nanjing 211100)
Abstract: Through using computer software Mathematica to process experimental data, we can get fitting curve.Discusseing the factors which may influence measurement results in the experiment and raises some improvements in order to obtain a more accurate measurement result.
key words: Data processing; System error;Improvement
弹性模量是工程材料重要的性能参数,从宏观角度来说,弹性模量是衡量物体抵抗弹性变形能力大小的尺度,从微观角度来说,则是原子、离子或分子之间键合强度的反映。静态拉伸法测弹性模量是一种传统的测量方法,但是实验过程中,存在金属丝拉伸不均匀的现象,而且由于金属丝拉伸过程变化较小,对于画图存在一定的误差,我考虑用Matlab画出图像,进行分析。
1 实验原理
胡克定律指出,对于有拉伸压缩形变的弹性形
 作者简介:王丽,女,1993,自动化,yx-wangli@qq.com.
作者简介:王丽,女,1993,自动化,yx-wangli@qq.com.
体,在弹性范围内,应力 与应变
与应变 成正比,
成正比,
即

式中比例系数E称为材料的弹性模量,它是描写材料自身弹性的物理量.改写上式则有、
 (1)
(1)
① 可见,只要测量外力F、材料(本实验用金属丝)的长度L和截面积S,以及金属丝的长度变化弹性
量 ,就可以计算出弹性模量E。其中,F、S和L都是比较容易测得的,唯有很小,用一般的量具不易准确测量。本实验采用光杠杆镜尺组进行长度微小变化量的测量,这是一种非接触式的长度放大测量的方法。
,就可以计算出弹性模量E。其中,F、S和L都是比较容易测得的,唯有很小,用一般的量具不易准确测量。本实验采用光杠杆镜尺组进行长度微小变化量的测量,这是一种非接触式的长度放大测量的方法。
本实验采用的主要实验仪器有:
弹性模量仪(如图1)、光杠杆镜尺组(如图2)、螺旋测微器、米尺、砝码等。
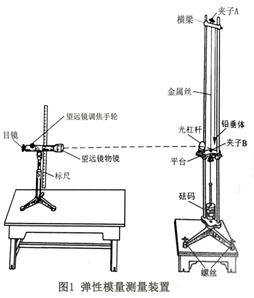
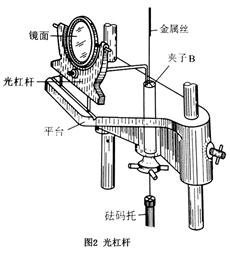
仪器调节好后,金属丝未伸长前,在望远镜中可看到由平面镜反射的标尺的像,将望远镜的细叉丝对准标尺的刻度,读出读数为R0;将砝码加在砝码托上后,金属丝被拉长,光杠杆镜面向后倾斜了α角.根据光的反射定律可知,此时在望远镜中细叉丝对准的是镜面反射后的标尺上的刻度R1,其对应的入射光和反射光的夹角为2α。
设N=R1-R2,K为光杠杆的前后足之间的垂直距离,D为光杠杆镜面到标尺之间的距离,考虑到 ,
, 角很小,所以有
角很小,所以有
可得
 (2)
(2)
将式(2)代入式(1)即得拉伸法测定金属丝弹性模量的计算公式
 (3)
(3)
式中d为金属丝的直径.
2 数据处理
2.1 各单次测量量
g=9.794m/s2
D±UD=187.55±0.3cm
L±UL=32.10±0.05cm
K±UK=7.32±0.05cm
2.2 金属丝直径d的测量
螺旋测微器的初始读数= 0.493mm
螺旋测微器的仪器误差
表1金属丝直径d

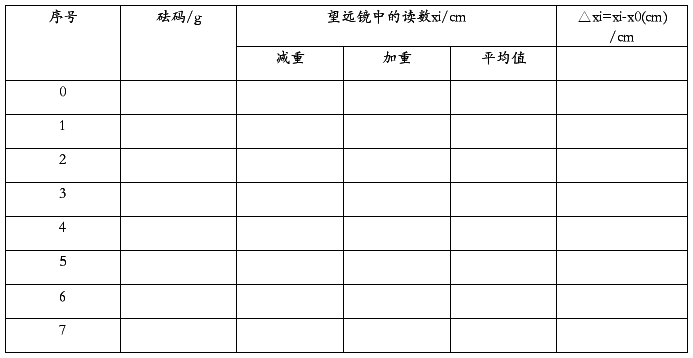
2.3望远镜中标尺像Ri的数据处理

2.3 标尺像R与砝码质量M的关系图
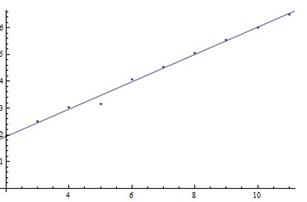
Y=0.923479 + 0.509988 x
K=0.509988
在新的测量仪器中运用了杠杆原理
E= =
= =1.74*
=1.74*
3 实验误差分析
3.1 人为因素
在放拿砝码时,由于人为可能碰到了砝码架,会导致支架有一定的摆动,会导致金属丝有伸长量,这种伸长量是不可逆的,对实验结果存在误差。
改进方法,在放拿砝码时尽可能的缓慢,轻微,使误差调到最小。
3.2 金属丝存在弯曲
由于温度,气候,对金属丝的弯曲会有一定的影响,尤其对前几次的测量会有较大的影响。
改进方法,由以前开始时的2.000kg的砝码改成5.000kg的砝码,在放置后,多次测量金属丝的直径,看是否直径分布均匀。若分布还不均匀,我觉得应再加大砝码的质量。
3.3 人的视力疲劳
在长时间的观察望远镜中的像后,人的眼睛会出现视力疲劳,对观察的像会出现模糊的感觉,会导致测量的不准确。
改进方法,在一定次数的测量之后,让眼睛休息一下,在测量。
4总结
对于用静态拉伸法测弹性模量,存在好多的误差可能导致对实验结果的影响。
在对实验结果处理运用数学分析时,我们可以运用逐差法或者图像法来加大实验结果的精确度。
对于不同的实验误差,我们可以运用不同的改进方法减少误差。
参考文献:
[1] 钱峰,潘人培.大学物理实验(修订版)[M].北京:高等教育出版社,2005:77-82.
[2] 鲍宇,罗致.静态拉伸法测量金属丝杨氏弹性模量实验结果的偏差分析[R].湖南长沙:《物理与工程》.2005.
第二篇:静态拉伸法测量材料的弹性模量
静态拉伸法测量材料的弹性模量
实验日期 20##年11 月 29日
实验目的
(1) 学习拉伸法测材料的弹性模量
(2) 了解光杠杆的结构原理,掌握使用方法
(3) 学习使用最小二乘法处理实验数据
实验仪器
弹性模量仪)(包括尺读望远镜)、千分尺(25mm,0.01mm)、游标卡尺(13cm、0.02mm)、钢卷(3m、1mm)、砝码(500g,8个)、钢丝
实验原理:
1测量原理
在弹性限度内,应力和相关应变成正比
对于长度为L的细长物体,其均截面积为A,沿长度方向寿拉力F时
伸长为△L,根据胡克定律有F/A=E*△L/L
F/A为作用在单位面积上的力,称为应力;
△L/L为单位长度上的形变为应变;比例系数E称为裁量的弹性模量,单位是N/
2用光杠杆噶测钢丝伸长量△L的装置原理
改变砝码,设两夹头之间钢丝长度变化量为△L,放在园挂R上的脚a也有△L的变化,于是光杆杠上的反射镜改变θ角,设钢丝长度变化前,望远镜中叉丝对准尺上的位置为x0;平面反射镜转动后,根据光的反射定律,镜面转动θ,反射线将转动2θ角,此时望远镜中叉丝将对准新位置x
设光杠杆M上的反射镜到尺的距离为D,光杠杆前后支脚间的垂直距离为l,因为θ很小,则2θ=tan2θ=x-x0/D,又θ=△L/L 故△L=l(x-x0)/2D
测量出l和D,由望远镜中读出x0和x,即可算出△L
从而求出E=2DL/Al*F/(x-x0)
由于A= /4*
/4* (d为金属丝的直径),
(d为金属丝的直径),
F=mg(m为金属丝上所加砝码的质量,
g为重力加速度,故而上式应为
E= *
*
实验内容与测量
(1) 调整仪器的装置
1) 调节反射镜使得米尺的反射像在望远镜中
2) 从望远镜中观察,调节视度圈看清望远镜中的十字叉丝;
调节聚焦手轮直至米尺的像清晰为止
砝码钩上加4000g砝码,记下望远镜中读书x7,然后依次减少砝码(每次减少500g),并记下相应的读数x6,x5,……
3) 用米尺测量L、D的长度
4) 用千分尺测量钢丝的直径d,在不同位置测量,共测量6次,
5) 取下光杠杆,让它的三支脚在平铺的白纸上扎三个小孔,用游标、卡尺测出l的长度
钢丝伸长与外力的关系
钢丝的直径数据表
千分尺初读数d0= cm
