论闭环零点对二阶系统单位阶跃响应的影响
作者:徐然班级:09电本一班学号:4090208122
摘要:实际工作中常常可以把一个高阶系统降为二阶系统来处理,因此分析二阶系统的单位阶跃响应,对于研究自动控制系统的暂态特性具有重要意义。二阶系统在欠阻尼时的响应虽有振荡,但阻尼比ξ取值恰当,则系统既有响应的快速性,又有过渡过程的平稳性,因此在控制过程中常把二阶系统设计为欠阻尼。大多数高阶系统中含有一对闭环主导极点,则该系统的动态响应就可以近似的用这对主导极点所描述的二阶系统来表达。
本文是通过直接求解系统在单位阶跃信号作用下的时域响应来分析系统的性能的。通过对设零点系统与未设零点系统上升时间、峰值时间、最大超调量、调节时间暂态特性各个方面的对比,以及零点位置的变化对各动态性能变化趋势最终找到闭环零点对实际二阶系统的作用效果。
关键词:自动控制 二阶系统 零点
0.引言
由二阶微分方程描述的系统,称为二阶系统。欠阻尼振荡的二阶系统在实际中可以看成是稳定的系统,因此分析欠阻尼系统具有实际意义。二阶系统的单位阶跃响应是反映二阶系统本质的重要表现形式。我们在实际生产过程中,二阶系统总是需要满足工程最佳参数的要求,但是通过改变开环放大系数的方法可能会增大系统稳态误差。因此需要通过设置零点的方法从而达到既满足工程所需的阻尼比,又保证系统稳态精度的目的。正是由于闭环零点对二阶系统如此重要,所以此文主要分析闭环零点对二阶系统单位阶跃响应的影响。
1. 二阶系统
一个系统的阶次是由其最简闭环传递函数分母S的最高次项决定的。二阶系统就是S的最高次项为2的闭环传递函数所对应的系统典型。简单来说就是由二阶微分方程描述的系统就叫做二阶系统。
1.1二阶系统结构图
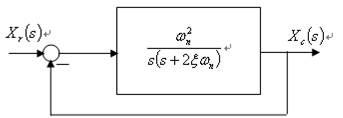
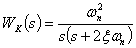
由图可知二阶系统开环传递函数为:
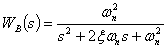
二阶系统闭环传递函数为:
1.2二阶系统单位阶跃响应
当输入为单位阶跃信号时 
故 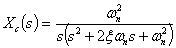
取拉氏逆变换有

 ①
①
其中
1.3二阶系统极点分布图

1.4二阶系统动态特性
1.4.1上升时间
令①中

则有 
得
 ②
②
1.4.2峰值时间
令①中 则第一个峰值对应的时间
则第一个峰值对应的时间
 ③
③
1.4.3最大超调量
由于 且
且
得  ④
④
1.4.4调节时间



 ⑤
⑤
2. 具有零点的二阶系统的动态分析
2.1具有零点的二阶系统结构图及传递函数
带零点的二阶系统结构图:
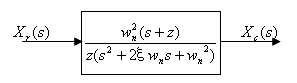
具有零点的二阶系统的闭环传递函数为:
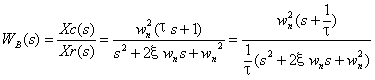
τ——时间常数
令 =z,则上式可写为如下形式:
=z,则上式可写为如下形式:
 ⑥
⑥
由式⑥可得,其系统的闭环传递函数具有零点-z,是具有零点的二阶系统
将式⑥分解,由
 得
得 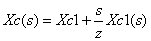
2.2具有零点的二阶系统的单位阶跃响应
为求其阶跃响应,设 ,取初始条件为零,则Xc1(s)和Xc(s)的拉氏反变换为
,取初始条件为零,则Xc1(s)和Xc(s)的拉氏反变换为
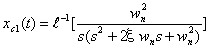
 ⑦
⑦
求出⑦中两项然后相加即得输出量,经过运算得
 ⑧
⑧
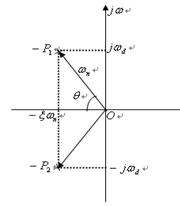
上述式子中的l为极点与零点间的距离,在复平面上画出其位置(假设零点在极点左侧):
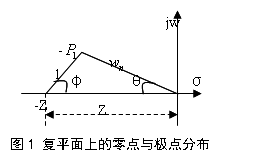
由图1可知:

故式子⑧可以写成:
 ⑨
⑨
式子中:
令 ,则上式中的
,则上式中的 可以写为
可以写为
r代表闭环传递函数的复数极点的实部与零点实部之比。
因此式子⑨可以写为:

 ⑩
⑩
由此计算得到了典型的具有零点的二阶系统的单位阶跃响应的公式,即为公式⑩。
3.具有零点的二阶系统的动态性能指标
由公式⑩得到了具有零点的二阶系统的单位阶跃响应的公式:

3.1上升时间
在动态过程中,系统的输出第一次达到稳态值的时间称为上升时间 。根据定义在公式⑩中令
。根据定义在公式⑩中令 时,
时, ,得
,得
 =0
=0
但在 期间,即没有达到最终稳定之前,
期间,即没有达到最终稳定之前, >0,所以使上式为0的原因是
>0,所以使上式为0的原因是 =0,因此讨论=0所出现的情况。
=0,因此讨论=0所出现的情况。
由=0得:
 =π
=π
 11
11
由上式可以看出上升时间受到 ,
, ,
, ,θ的影响,当,,θ一定的时候,上升时间只与有关。
,θ的影响,当,,θ一定的时候,上升时间只与有关。
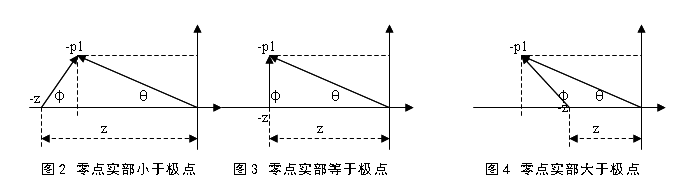
由图2,图3,图4可以看出随着z值的减小,零点越来越靠近虚轴,φ值逐渐增大,由11可得逐渐减小。
3.2最大超调量σ%
最大超调量发生在第一周期中 时刻,即导数为0的时刻。
时刻,即导数为0的时刻。

得 
因此 
即 
因为第一次达到最大值经过时间,因此n取值为1,当n=1时,
 12
12
有式子12可以看出,的值随φ的值增大而减小,结合图2,图3,图4得到结论:z值逐渐减小,φ值逐渐增大,逐渐减小。
3.3调节时间
调节时间是 与稳态值
与稳态值 之间的偏差达到允许的范围而不再超出的动态过程时间。在动态过程中的偏差为
之间的偏差达到允许的范围而不再超出的动态过程时间。在动态过程中的偏差为

当 时采用近似计算法得到:
时采用近似计算法得到:
 (或0.02)
(或0.02)
由此求得调节时间为:
 , 0<ξ<0.9
, 0<ξ<0.9
 , 0<ξ<0.9
, 0<ξ<0.9
由上面的两个式子可以看出,具有零点的二阶系统的调节时间只与ξ和有关,与z的大小无关。
3.4振荡次数μ
振荡次数是指在调节时间内,波动的次数。根据这一定义可得振荡次数为:

其中 即阻尼振荡的周期时间。
即阻尼振荡的周期时间。
由上述公式可以看出,振荡次数μ只与与阻尼ξ和振荡角频率有关,因此振荡次数不受零点的位置影响,即与零点的大小无关。
4.总结分析
通过上述分析可以看出,有具有零点的二阶系统的响应指标与无零点的系统有很大的差别。
无零点的上升时间只与阻尼ξ和振荡角频率有关,而在具有零点的二阶系统中,上升时间还与零点的实部有关,反映到图像上,即零点离虚轴越近上升时间越小。由可知,r值越大,振荡性就越强。
最大超调量σ%也与零点的位置有关,z值越小,φ值越大,影响的值变小。
调节时间只与阻尼ξ和振荡角频率有关,所以不受零点位置的影响,同样,振荡次数也不受其影响。
参考文献:
1. 王建辉,顾树生. 自动控制原理.[M].北京.清华大学出版社.2007
2. 吴麒, 自动控制原理. [M]北京: 清华大学出版社. 1990
3. 张元林, 积分变换. [M]北京: 高等教育出版社. 2003
4. 高国燊,余文杰,彭康拥,陈来好.自动控制原理.[M].华南理工大学出版社.2006
5. 胡寿松.自动控制原理.[M]. 科学出版社.2007
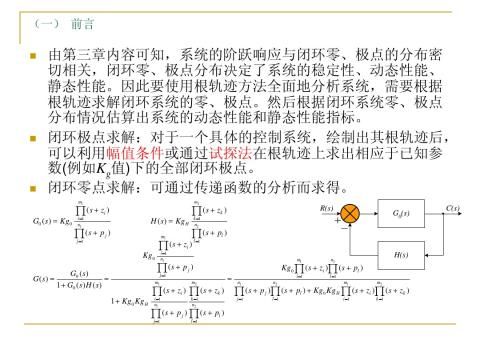
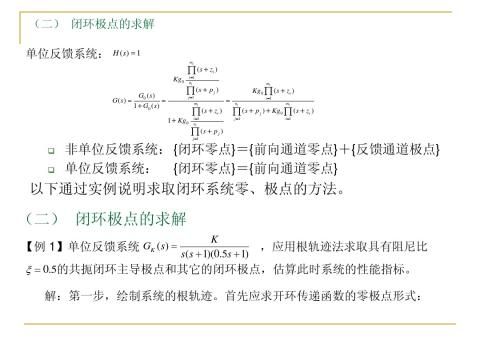
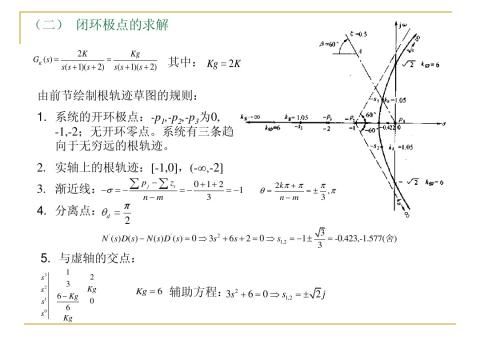
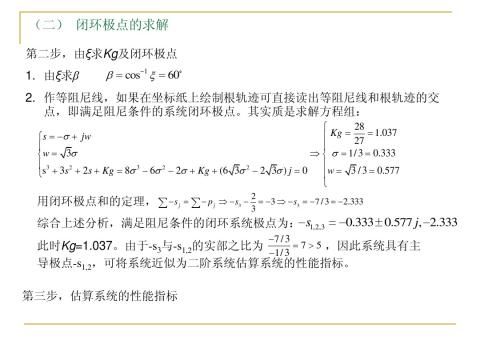
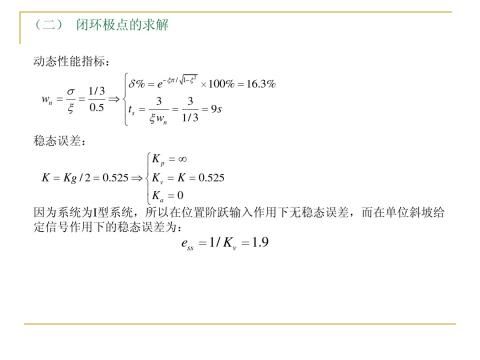
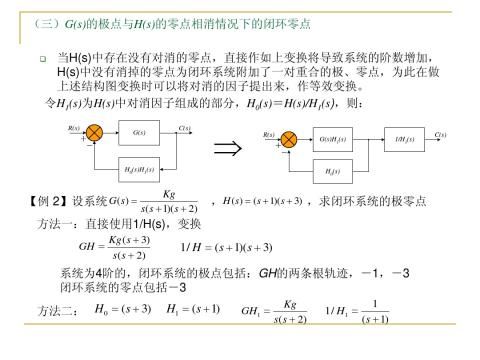
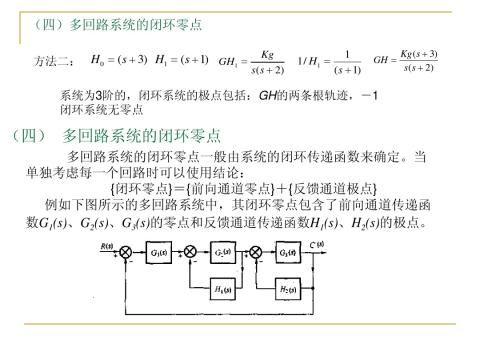
第二篇:5闭环系统的极点和零点