南京师范大学
毕业设计(论文)开题报告 姓 名:
学 院:
专 业
专业方向:
题 目:
指导教师:
开题报告填写要求
赵汉枫 学 号: 21060429 电气与自动化工程学院 电气工程及其自动化 工业自动化 基于Simulink对单级倒立摆的控制和仿真 曹 弋 2011 年 3 月 8 日
1.开题报告作为毕业设计(论文)答辩委员会对学生答辩资格审查的依据材料之一。此报告应在指导教师指导下,由学生在毕业设计(论文)工作前期内完成,经指导教师签署意见及院、系审查后生效;
2.开题报告内容必须用黑墨水笔工整书写或按教务处统一设计的电子文档标准格式(可从教务处网址上下载)打印,禁止打印在其它纸上后剪贴,完成后应及时交给指导教师签署意见;
3.有关年月日等日期的填写,应当按照国标GB/T 7408—94《数据元和交换格式、信息交换、日期和时间表示法》规定的要求,一律用阿拉伯数字书写。如“20xx年4月26日”或“2005-04-26”。

毕 业 设 计(论 文)开 题 报 告
第二篇:单级旋转倒立摆的建模与控制仿真

20xx年第5期?机器人技术与应用
单级旋转倒立摆的建模与控制仿真
!段旭东许可
中国科学技术大学自动化系
[摘要]本文介绍了单级旋转倒立摆系统的构成和数学模型,根据倒立摆系统的数学模型在Matlab环境下设计了两种控制器,并进行仿真。仿真结果表明了最优控制策略LQR控制器的控制效果要优于闭环状态反馈极点配置调节器。[关键词]旋转倒立摆数学建模Matlab仿真状态反馈最优控制策略LQR
[Abstract]ThestructureandmathematicmodelofSingle-RotationalInvertedPendulum(RIP)ispresentedinthispaper.Twocon?trollerforRIParecreated.TheresultofsimulationbasedonMatlabshowsthattheLQRControllerissuperiortotheState-feedbackController.
[Keywords]RotationalInvertedPendulum;MatlabSimulation;LQRcontroller;State-feedbackController
一引言
倒立摆(InvertedPendulum)作为一个被控对象,是快速、多变量、开环不稳定、非线性的高阶系统,必须施加十分强有力的控制手段才能使之稳定。许多新的实时控制理论,都通过倒立摆控制试验来加以验证。从工程背景来讲,小到日常生活中所见到的各种重心在上、支点在下的物体的稳定问题,大到火箭的垂直发射控制等关键技术问题,都与倒立摆控制有很大的相似性。
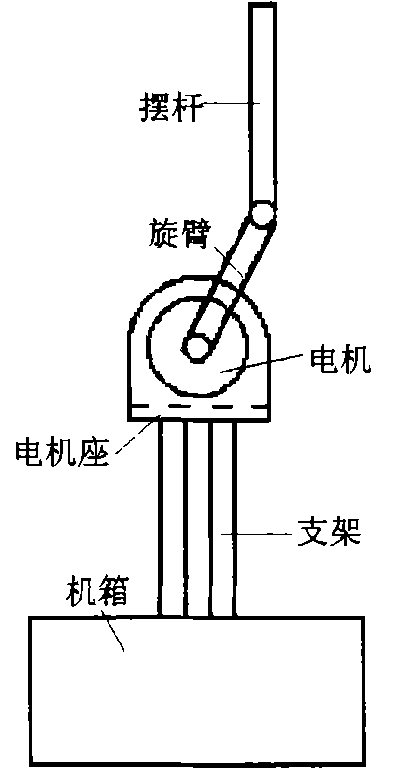
与普通的小车???摆杆倒立摆系统不同,本文研究的倒立摆系统是单级旋转倒立摆系统,将摆杆安装在与电机转轴相连的旋臂上,通过电机带动旋臂的转动来控制摆杆的倒立,将平动控制改为旋转控制,使得整个系统更为复杂和不稳定,增加了控制难度。
由图可以看出,两个角度电位器分别安装在直流电动机的转轴处和摆杆关节处,可以测量旋臂与铅直线角度偏移量,摆杆与旋臂之间的相对角度偏移量。由两个角度电位器提供的电压信号分别定标后,作为旋转倒立摆的两个输出量,经过A/D转换,送入计算机,由计算机按照一定的控制算法计算出数字
图2单级旋转倒立摆的模型分析
量的控制信号,再经过D/A转换及功率放大器放大后去驱动直流力矩电动机,使单级旋转倒立摆在不稳定的平衡点处平衡。
二旋转倒立摆的系统结构?
单级旋转倒立摆系统主要由控制对象、电位器、直流电动机、倒立摆底座构成。其构成如图1所示。?
图1单级旋转倒立摆系统构成
三单级旋转倒立摆的数学建模?
模型分析如图2所示,根据牛顿力学有如下结果:
?J2#?2+f2?2=M12+m2gL2sin?2?在非惯性系S2中,对摆杆有其中,M12为旋臂对摆杆的作用力矩,有
2#1-?2)-R?1cos(?1-?2M12=m2L2R??1sin(?%在惯性?1+f1?1=M0+M21+m1gL1sin?1&其系S1中,对旋臂,有J1#?
[作者简介]段旭东,男,(1978-),汉族,安徽合肥,现在在中国科学技术大学自动化系攻读硕士学位,主要从事控制理论与控制
工程方面的研究,对模糊控制和神经网络控制感兴趣。
?


20xx年第5期
1)?中,M0为电机输出转矩,M0=Km(u-Ke??M21为摆
?机器人技术与应用
1
M=
(m1L1+m2R)g
0m2gL2?3?
1杆对旋臂的作用力矩,有:
M21=m2g+
-m2
1+L2cos?2)?R1sin?12(R1cos?
dt
2
2
,令X=,Y=,
4
1+L2sin?2)?R1cos?12(R1sin?
dt
A=
O2)2JM
-1
X=AX+BUY=XCO2)1-1
,其中
。
2#2?1-m2R1?1-m2R1L2?2sin(?1-?2)=m2gR1sin?
#2cos(?1-?2)-m2R1L2?(
I2)2-J-1
,B,C=I2)2O2)2
联立式?~(,消去中间变量和,并将代入,得系统的非线性数学模型:
J1+m2R1
m2R1L2cos(?1-?2)+=
?2-?1)?1m2R1L2sin(?Km0u+f1+KmKe
2
1-?2)m2R1L2cos(?
下面所提出的两种控制方案都是在上述状态空间线性模型的基础上进行的。
1
#J2m2R1L2sin(?1-?2)2
f2
四控制器的设计
1.闭环状态反馈极点配置控制器
按照线性控制理论,系统能够通过状态反馈将闭环极点配置在S域任意位置,前提条件是能控矩阵Mc=[BABABAB]满秩,即RANK(Mc)=4。通过Matlab很容易知道,该系统是能控而且能观的。?
设极点配置的控制律为:
U=-KX,
K可以由Matlab提供的acker命令求出。由于倒立摆系统只有?1、?2这两个量可以测出,所以需要对另外两个状态量进行重构,需要使用降维状态观测器。通过仿真和实际控制经验,将整个闭环系统的闭环极点配置为:
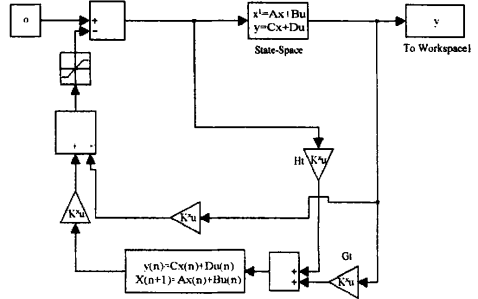
si=[-1+i-1-i-10+10i-10-10i]在Matlab中使用acker命令得出反馈增益矩阵K=[-55.6807-355.0066-5.8181-19.9514]然后在Matlab的Simulink环境下,建立带降维观测器的状态反馈线性仿真模型(如图3)。
2
3
1+m2gR1sin?1m1gL1sin?
2m2gL2sin?
其中,有关参数的物理意义如下:
旋臂位置?1;摆杆位置?2;旋臂质量m1;摆杆质量m2旋臂长度R
摆杆长度R2旋臂质心到转轴距离L1摆杆质心到转轴距离L2
电机力矩-电压比Km
电机反电势-转速比Ke
摆杆绕轴转动摩擦力矩
旋臂绕轴转动摩擦力矩系数f1
系数f2
旋臂绕轴转动惯量J1
摆杆绕轴转动惯量J2
在得到非线性数学模型后,为了解决问题、简化问题,我们要使系统在某一微小的范围内或者平衡点附近满足线性关系,以便进行分析、设计、控制。因此需要将上述非线性数学模型在倒立摆的不稳定平衡位置进行线性化处理。?
为了保持旋转倒立摆在摆杆的位置上平衡,必须使柄转动角度?1和摆杆的转动角度?2非常小。这样,我们在进行线性化的时候,由于?1、?2都很小,在这种情况下,可以用如下近似关系:
sin?=?、cos?=1,并忽略相关的高次项,最后得到的线性化数学模型如下:
J=
J1+m2Rm2RL
2
m2RLJ2
2
2
,F=
f1+KmKe
f
,
图3带降维观测器的状态反馈线性仿真模型
20xx年第5期
2.最优控制策略LQR控制器根据现代控制理论,设最优控制量为:
U?=-KlqrX
使二次性能指标
?
?机器人技术与应用
XQcX+URcdt
TT
取最小。
在仿真时,不需要人工计算,可以由Matlab提供的命令lqr求出最优增益矩阵Klqr,然后再用Matlab中的Ini?tial命令,可以得到闭环反馈系统在零输入下的反应曲线。
在实际仿真时,通过选择合适的加权矩阵Qc和Rc,可以得出用于仿真的最优增益矩阵Klqr,取
Qc=1.6)I4)4;Rc=0.8,计算得出最优增益矩阵:
图5控制量变化曲线
在由Matlab提供的命令lqr求出最优增益矩阵Klqr后,用Matlab中的initial命令:
initial(A-BKlqr,B,C,D,X0,T)
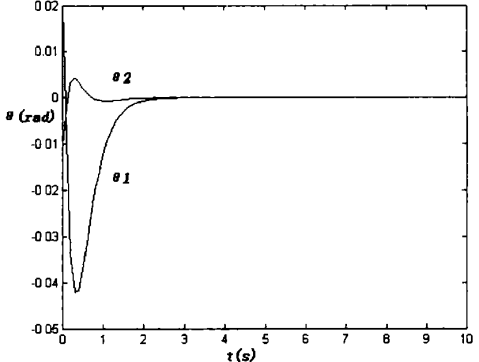
便得到闭环反馈系统在零输入下的反应曲线(如图6)。为了与闭环状态反馈极点配置调节器的控制效果作比较,初始条件我们也取为X0=[0.02-0.0100](弧度)。同样的,为了保证在直流电动机的输出量限制范围内使旋转倒立摆稳定,初始条件也只能在-18+到+18+之间。?
?
Klqr=[-0.0937-235.3046-12.1502-47.2341]
五仿真结果及分析
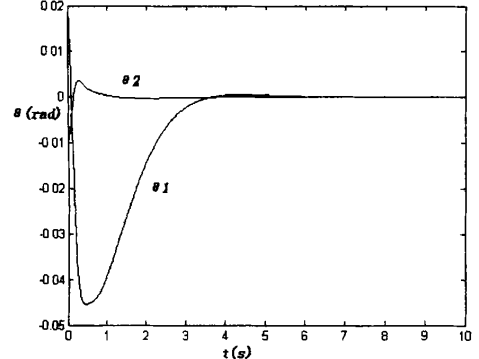
1.闭环状态反馈极点配置调节器仿真结果:通过在Matlab的Simulink环境下,由带降维观测器的状态反馈线性仿真模型,在初始条件为X0=[0.02-0.0100](弧度),仿真出的系统的零输入响应曲线(如图4),和控制量变化曲线(如图5)。
图6系统在零输入下的反应曲线
LQR控制器仿真结果表明,LQR控制器对于单级
图4系统的零输入响应曲线
旋转倒立摆的控制效果比状态反馈极点配置控制器要好。在同样的初始条件下,LQR控制器只需要3秒就使系统达到平衡;而状态反馈极点配置控制器则需要6秒的时间。而对于要求快速反应的旋转倒立摆而言,LQR控制器是比较合适的。
由于单级旋转倒立摆的直流电动机的输出量的限制(为-6V到+6V),所以为了保证在可控条件下使旋转倒立摆稳定,初始角度不能太大,否则将无法在直流电动机的输出量的限制范围内使系统稳定。经过仿真测试,当初始角度在-15+到+15+之间,系统都可以达到稳定,即?1、?2和U最后都为零。
2.最优控制策略LQR控制器仿真结果:
六结论?
从上述两种控制器的仿真效果来看,最优控制策略LQR控制器的控制效果要优于闭环状态反馈极点
?
20xx年第5期?机器人技术与应用
雄关漫道真如铁而今迈步从头越
???FIRA机器人足球世界杯赛观感
!徐心和曹洋
东北大学人工智能与机器人研究所
20xx年5月23日-5月29日,由国际机器人足球联合会和韩国科学部举办的第七届机器人足球世界杯在韩国成功举行。作为FIFA世界杯赛的一项科技活动,本次比赛被安排在FIFA世界杯赛前一周开幕,因此也受到了各个方面极大的关注。这届比赛共有来自25个国家的207支队伍参赛,是机器人足球历史上规模空前的一次盛会。
本次比赛共分8个项目,分别是MIROSOT(集控式机器人)小型组(3:3),中型组(5:5),SIMUSOT(仿真比赛)中型组(5:5),大型组(11:11),ROBOSOT(小型自主机器人3:3),KHEPROSOT(小型自主机器人1:1),NAROSOT(超微型机器人5:5)和HU?MOSOT(双足机器人)。在这8个项目中,SIMUSOT和MIROSOT的四项比赛是参赛队伍最多,竞争最激烈的几个项目。而其它几个项目由于是FIRA的新兴项目,而且成本较高,只有几支队伍参加,因此影响较小。SIMUSOT和MIROSOT的比赛分为小组赛和决赛两个阶段。小组阶段的比赛被安排在了五个世界杯举办城市举行,它们分别是大田、大邱、光洲、釜山和水原。只有在小组阶段的比赛中出线的队伍才能和参加其他项目的球队一起参加在汉城举行的决赛阶段的比赛。
中国共派出了7所学校的代表队参加这次世界杯赛,他们分别是东北大学,哈尔滨工业大学,清华大学,武汉化工学院,北方工业大学,山西大学和华北电力学院。其中,东北大学,哈尔滨工业大学和武汉化工学院参加了在汉城决赛阶段的比赛,共取得了二金二银二铜的骄人成绩,为祖国争得了荣誉,也使中国真正迈入了机器人足球强国的行列。
在SIMUSOT的两项比赛中,中国占据了绝对的优势。参赛的三支队伍共获得了一项冠军、两项亚军和一个季军。其中,武汉化工学院获得了中型组的冠军,东北大学获得中型组亚军和大型组的季军,哈尔滨工业大学获得大型组的亚军。再加上大型组比赛的冠军被台湾国立大学获得。这样,SIMUSOT的领奖台实际上就成了中国人的天下。在MIROSOT的两项比赛中,中国球队的表现同样出色。代表中国参加比赛的是东北大学队,这是目前国内唯一一支拥有全部自主知识产权的机器人足球队。在MIROSOT小型组(3:3)的比赛中,东北大学队在决定小组出线的决赛中与最后获得冠军的韩国POWERSUPPLY3队相遇,在正常比赛时间内双方打成了7:7平。在随后进行的点球大战中,东北大学队不幸以一球失利,无缘四强。赛后,这场比赛被评为本届世界杯赛中最精彩的赛事之一。在中型组(5:5)的比赛中,东北大学队的发挥更为出色。在顺利通过小组赛之后,东北大学队又在决赛阶段的比赛中大发神威,分别以17:0和11:0的悬殊比分击败了法国和南非队,闯进了四强。其中,与法国队比赛17:0的比分还创下了本届杯赛决赛阶段最高比分差距的纪录。在半决赛中,东北大学队与韩国的KingGo队苦战一个小时,以2:3的微小劣势输掉了这场比赛,没能进入决赛。决赛中,KingGo队以7:0击败德国队获得冠军,东北大学队以7:2击败了奥地利队获得季军。这一成绩是中国机器人足球队在这一项目上取的最好成绩,同时它也有力的证明了中国人自己研制的微型足球机器人系统是完全可以和包括韩国在内的所有世界强队抗衡的。
除了在SIMUSOT和MIROSOT两个大项的比赛中有着出色的表现以外,中国队在其他小项目上也有着很好的表现。哈尔滨工业大学队夺得了ROBOSOT比赛的冠军。其他的几个项目的获奖情况如下:丹麦的两支球队包揽了KHEPROSOT比赛的冠亚军。韩国的HanSaRam-II队和RATS-0队分获HUMOSOT比赛的冠亚军。韩国的Y2K2队获得了NAROSOT比赛的冠军。
纵观本届世界杯的比赛,代表中国参赛的几支球队均发挥了极高的水平。尤其是东北大学队,一个队就获得了四个大项比赛中的一个亚军和两个第三名,是本届比赛获得奖牌最多的球队。而武汉化工学院和哈尔滨工业大学队也充分展示了自己的风采,取得了出色的成绩。所有这些成绩都充分表明中国机器人足球的水平已经迈入了世界一流的行列。当然也要看到,机器人足球在中国还不像韩国那样普及,足球场上的双足机器人尚未起步,中国要真正成为机器人足球的强国,还有很长的路要走。
配置调节器。在实际的控制中,两者的大致趋势是一致
的,LQR控制器具有较优的鲁棒性和瞬态特性。但是,
由于实际旋转倒立摆系统的角度电位器在采样电路中
不可避免的会混入噪声,再加上直流电动机存在死区,
当控制量比较小时,会使系统反应迟钝,故仿真的结果
与在实际控制中的结果还是有差别的。?
本论文的后继工作在于寻找控制方法、原理均不同
的其它控制理论来设计,如模糊控制原理,以求进一步
改善和提高旋转倒立摆的瞬态特性和鲁棒性。
参考文献[1]中国科技大学创新公司旋转倒立摆技术资料,合肥:2001[2]从爽张冬军魏衡华单级倒立摆三种控制方法的对比研究[J]系统工程与电子技术,2001,23(11):47-49.[3]薛定宇控制系统计算机辅助设计-Matlab语言及应用[M],北京:清华大学出版社,1996[4]仝茂达线性系统理论和设计,合肥:中国科学技术大学出版社,1998[5]周凤歧强文鑫阙志宏现代控制理论及其应用[M],成都:电子科技大学出版社,1994