
毕业设计(论文)开题报告
论文题目: 二级倒立摆的模糊控制 姓 名: 张超 (字体是否正确?) 学 号: 20078001060
学 院: 机电与信息工程学院 专 业: 自动化
年 级: 2007级
指导教师: 洪晓英
山东大学威海分校毕业论文(设计)开题报告书
一、 课题来源
倒立摆系统作为研究控制理论的一种典型的实验装置,具有成本低廉、结 构简单、物理参数和结构易于调整的优点。然而倒立摆系统本身具有高阶次、 不稳定、多变量、非线性和强耦合特性,是一个绝对不稳定系统,必须采用十 分有效的控制策略才能使之稳定。倒立摆系统是研究变结构控制,非线性控制, 目标定位控制,智能控制等控制方法的理想实验平台。
二、本课题的基本内容
本课题的主要工作是研究了直线二级倒立摆系统的智能模糊控制问题,运用Matlab和Simuilnk仿真工具对二级倒立摆系统建模并对二级倒立摆LQR(linear quadratic regulator 线性二次型调节器)控制进行了仿真,设计了智能模糊控制系统并进行了控制仿真。具体内容如下:
(1)阐述了对倒立摆系统稳定性研究的意义,总结了当前已有的稳定倒立摆的各种方法。
(2)根据二级倒立摆实物,详细论述了二级倒立摆的数学建模方法,推导出微分方程以及线性化后的状态方程,并且分析了倒立摆系统的可控性、可观性。
(3)进行了二级倒立摆系统的LQR(linear quadratic regulator 线性二次型调节器)控制方法研究。运用最优控制理论,探讨了加权矩阵Q和R的选取方法。介绍了如何利用MATLAB建立倒立摆系统模型,进行了二级倒立摆LQR(linear quadratic regulator 线性二次型调节器)控制器的仿真,给出了仿真曲线。
(4)讨论了二级倒立摆系统的智能控制方法。对于二级倒立摆,通过融合函数降低输入变量维数,解决了“模糊规则爆炸”问题,利用专家知识设计Mamdani型模糊控制器的隶属度函数和模糊规则,提升了模糊控制器的性能。并用Matlab软件进行了仿真,仿真结果显示出该控制方法可以对二级倒立摆系统进行很好的控制,具有很好的鲁棒性。(有些啰嗦,可稍微精简一下)
三、 本课题的重点和难点
1. 本课题的控制方案很多,选择一个有效的控制方案,做到数学模型建立
容易,好的仿真实现。
2. 模糊控制的知识表示、模糊规则和合成推理是基于专家知识或熟练操作
者的成熟经验,并通过学习可以不断更新。
3. 设计模糊控制器。
四、 论文提纲
1.绪论
1.1倒立摆系统研究的科学意义
1.2 倒立摆系统的国内外研究现状
2.倒立摆系统的基本原理及其性能分析
2.1二级倒立摆数学模型的建立
2.2二级倒立摆的性能分析
3.现代控制理论在倒立摆控制中的应用
山东大学威海分校毕业论文(设计)开题报告书
3.1控制方案的选择
3.2二级倒立摆线性模型系统的仿真
4.模糊控制原理及其在倒立摆控制中的应用
4.1模糊控制的基本原理
4.2基于MATLAB的模糊控制器的设计
4.3模糊控制非线性
设计总结
谢词
参考文献
五、 进度安排
2010.11.01——2011.03.01
2011.03.02——2011.03.15
2011.03.16——2011.04.01
2011.04.02——2011.04.15
2011.04.16——2011.05.01
2011.05.02——2011.05.10
查阅相关文献资料 弄懂二级倒立摆的工作原理,建立数学模型对二级倒立摆的性能分析 选择控制方案,进行系统仿真 设计二级倒立摆基于MATLAB的模糊控制器 撰写毕业论文
山东大学威海分校毕业论文(设计)开题报告书
毕 业 论 文 开 题 报 告
第二篇:二级倒立摆的模糊控制研究
第17卷
V01.17
第lO期
No.10
电子设计工程
Electroni(‘DesignEngineering
2009年10月
O(:t.2009
二级倒立摆的模糊控制研究
焦灵侠.张荷芳
(西安工业大学电子信.t-工程学院.陕西西安710032)
摘要:倒立摆系统是多变量、非线性、强耦舍的控制系统。采用模糊控制理论研究二级倒立摆控制问题。运用最优控制方法设计融合函数以降低模糊控制器的维数,减少模糊控制规则数,进而提高模糊控制器的性能品质。理论和实
验都表明该模糊控制算法是有效.可行的。
关键词:二级倒立摆;数学模型;模糊控制;融合函数中图分类号:TP273
文献标识码:A文件编号:1674—6236(20019)104)1054)3
Researchoffuzzycontrolfordoubleinvertedpendulum
JIAOLing-xia,ZHANGHe—fang
(ElectronicsandInformationEngineeringCollege,Xi’tinTechnologicalUnivers咖,Xi’an710032,China)
Abstract:Theinvertedpendulumisintroducedetiesof
a
a
muhivariable,nonlinear,strong—complyingcontrolsystem.Thefuzzycontroltheoryis
to
studythecontrollingproblemofthedoubleinveTtedpenduluminthis
are
paper.The
dimensions
ofinputvari-
fuzzycontroller
depressedbydesigning
a
fusionfunctionusingtheoptimizationcontroltheory,andit
reduces
therulesoffuzzy
contr01.Theoryandexperimentprovethatthisfuzzycontrolarithmeticiseffectiveandfeasible.
pendulum;mathematicalmodel;fuzzycontrol;fusionfunction
Keywords:doubleinverted
1
引言
在控制理论发展的过程巾.某一理论的正确性及实际应
为数字信号传输至计算机。通过已设计的控制程序计算控制
力所需电压值.经D/A转换器转换为模拟信号,功率放大后驱动电机运转.电机再用皮带拖动小车在导轨上往复运动实
用中的可行性都需要一个按其理论设计的控制器控制一个典型对象进行验证。倒立摆就是这样一个被控制对象,倒立
摆系统是一个多变量、快速、非线性和自然不稳定系统,在控
现对倒立摆的有效控制。忽略空气阻力和各种摩擦。并认为摆杆为刚体。图l为二级倒立摆示意图。
制过程中该系统能有效反映控制中的许多关键问题,如非线
性问题、系统的鲁棒性问题、随动问题、镇定问题及跟踪问题
等。倒玄摆在控制理论研究中是一种较为理想的实验装置。小车倒屯摆系统的控制目标是倒立摆通过小车能够稳定在有限长度的导轨上而不倒下,从而达到动态平衡。
本文针对二级倒立摆非线性模型.基于Maminadi模型,
图1二级倒立摆不意图
倒立摆参数定义如下:肘为小车质量,0.584kg;m.为摆杆1质量.O.05kg;ma为摆杆2质量,O.13kg;m3为摆杆3质
量,0.236kg;1.为摆杆1中心到转动中心的距离,0.0775m;
通过设计融合函数来设计模糊控制器.有效解决规则爆炸问
题.实现二级倒立摆的有效控制。
2二级倒立摆的数学模型的建立
二级倒立摆由小车、摆杆、水平导轨等组成。小车由伺服电机、皮带轮、传动带带动在水平导轨上左右运动,上下摆可绕各自的转轴在水平导轨所在的铅垂面内自由转动。小车和上下摆杆间通过轴承连接.每个轴承连接处同定有电位器,分别用以检测两根摆杆与铅垂线的角度偏移。小车相对轨道中心点的偏移位置也南同定在皮带轮轴上的电位器检测III。
其基本原理为:角度、位置信号经检测电路获取后.再由微分电路得到相应的微分信号,这螳信号经A/D转换器转换
收稿日期:2009—05—26
稿件编号:200905074
如为摆杆2中心到转动中心的距离,0.25m;0.为摆杆l与竖直方向的夹角;以为摆杆2与。竖直方向的夹角;F为作用在系统上的外力:g为重力加速度.9.8
m/s2。
利用托格朗日方程推导运动学方程。拉格朗日方程为:
L(q,q)=71(q,q)一V(q,q)
(1)
式中.£为托格朗13算子,q为系统的广义坐标,r为系统的动能.V为系统的势能。
一ddt詈一器《踮。如。功
式中,i=l,2,3…,nZ为系统在第i个广义坐标上的外力。
(2)”7
作者简Or:焦灵侠(1983一),女,陕西西安人,硕士研究生。研究方向:智能控制。
-105-
万方数据
§皂±塑盐王程》至塑生笙!Q塑
在二级倒立摆系统中,系统的广义坐标有3个.分别为石,0,,岛。经计算并线性化并带人参数值得到系统的状态空间方程:
0
1
0
0-
6¨.64
-0.088j
0
(3)
I
户I蚓x]=i
oooo
i
3二级倒立摆模糊控制系统的设计与仿真
二级倒立摆系统控制目标较多,包括小车位移.下摆摆角.上摆摆角。传统的模糊控制器采用系统误差.误差的导数作为输入.若用传统模糊控制控制二级倒立摆。则模糊控制器有6个输人:小车位移、小车速度、下摆摆角、下摆角速度、上
摆摆角和上摆角速度。
若对每个输入变量定义5个模糊子集。控制规则最多有5s个.模糊控制规则设计复杂,可调参数非常多,不利于模糊规则的完整制定.这就是在使用模糊控制研究多变量非线性
系统时的所谓“规则爆炸(RdeExplosion)”问题闭。然而.如果
用3组二维模糊控制器(2输入1输出)通过串行或并行设计控制器。由于控制器个数增加,大大降低控制实时性,甚至由于不能及时输出当前控制作用力而失控。3.1倒立摆控制合成变量
本文是将最优控制理论与模糊控制相结合而采用的一种融合技术131。它是把小车的位移、上摆摆角、下摆摆角综合成一个变量E。将小车的速度、上摆的角速度、下摆的角速度综合成一个变量EC。E和EC作为模糊控制器的输入,电压u作为输出。减少模糊控制器的输入,解决规则爆炸的问题.由此设计Mamdani型模糊控制器。
通过LQR仿真,得出输入输出数据对,根据得到的数据计算并制定模糊规则。
对于嵌套甬数y钒昕(x)】,先使用』(髫)对输人变量作初
步处理,再利用算法正(算)根据前级算法的输出进行控制q,;称为融合函数,正称为作用甬数。
首先利用最优控制理论中的LQR求得系统的状态反馈系数K和状态向量X:
K=雎,k叭k啦k,k..&丁,工=【r
0J02
r
pl口J。
一106一
万
方数据为实现变量融合。分别选取两个反馈系数为控制主元,其他输入变量可根据与主元的相关性和可融合性分别归并到两主元中。对于二级倒立摆.由于摆杆2的控制难度最大,分别选择如、旁:为控制主元,相应系数为:ke=k以,k.=%。融合函数的
输出向量为:
一
一一
工=旧卯
则有:
u=Kx=k,r+kmol+ktE02+k.r+k.多I+知就
矗。(筹r+百k@l矾棚)+矗.I鲁;+瓮扫。+扫)-t匆“;
(4)
似,篇甜
(5)
通过把输入状态变量降维.得到角度误差E和角速度误
差EC:
黝扣)xr
(6)
通过信息融合。将系统的6个状态变量化为2个状态变量。减少系统的输入。实现模糊控制器的降维。由降维后得到的2个变量E和EC做为模糊控制器的输入.设计一个二维Mamdani型的模糊控制器。利用最优控制求得置。最优控制性能指标函数为:
扛l(XrQX+uTRu)山(7)
;
使式(7)为最小,可求得:
j,=(口1阳+足)‘‘(曰1只t)
(8)
求解如下Ricatti方程可得到矩阵P:
ATpA-ArPB(BrPB+R)。(BTPA)+Q寸
(9)
性能指标函数中,定义矩阵Q和矩阵R用来平衡系统对输入量和状态量的敏感程度。它们对闭环系统的动态性能影响很大。
在倒立摆系统中,Q,足分别用来对状态向量工和输入控制量H进行平衡加权。一般情况下。P增加时.控制力减小,角度变化变小,跟随速度变慢。而Q中某元素增加时,其对应的状态变量的响应速度也增加.其他状态变量的响应速度相对减慢。为了使得反馈矩阵置更合理,对矩阵Q。R的选取一定要尽量恰当。通过反复测试。实际系统的控制过程选取Q=diag[500
70070000
0】,R=I。
根据二级倒立摆的参数。基于MATLAB强大的矩阵运算及其丰富的内部函数,利用K=lqr(A,B,Q,足)命令计算,可得到状态反馈矩阵鬈:
K=[22.361
118.028-223.6222.947
2.1796-36.561】(10)
BP4
堡基堡:箜三丝型皇堡堕堡塑蕉型堑窒
.
:
则设螂小[等103(:.。:3意斗
…,
从而得到综合误差E和综合误差变化率EC。3.2降维后设计二维Mamdani型模糊控制器I蜘
输入变量E、EC,输出变量£l;E、EC论域设定:E=卜6,6】,
EC=[--6,6】,输出论域如卜l,l】均采用=三角型、全交迭、均匀分
布隶属度函数。每个变量用5个模糊子集INBNSZEPSPBl
来描述.隶属度函数曲线网如图2、图3所示。EC的隶属度函数曲线同E的隶属度函数曲线。
之
藿。
譬
E(‘)/rad
图2E的隶属度函数曲线
\j
憾姆0.謦
图3U的隶属度函数曲线T/8
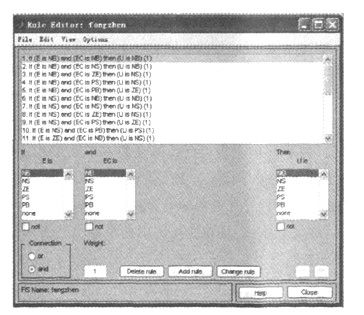
模糊推理采用Mamdani最小运算规则。根据输入、输出
PS(正小),
姜麓羔模篓霉霎誓差掣:0:耋盏|’::::负::;姿孤‘零L(正大),设计模糊推理规则如图所示。5目不恫
4
图4模糊控制规则
模糊控制器采用重心法实现非模糊化,与一般采用的最大隶属度法相比较,重心法具有更加平滑的输出推理控制。通过以上分析和试验,并恰当地选择模糊逻辑系统的参数.从而设计一个适合被控对象的模糊控制器,如图5所示。图5
中,K、亿为量化因子,K。为比例因子,State—Space为系统的
状态空间方程,Saturation为限幅模块,Scope为示波器模块。
根据以上工作.在Simulink环境中对二级倒立摆系统进行仿真,其仿真曲线如图6所示。
万
方数据,
图5二级倒立摆系统仿真结构图
图6二级倒立摆系统仿真曲线
结束语二级倒立摆是典型的多输入、非线性、强耦合系统。通过设计融合函数降低控制器的输入维数.用模糊控制解决多输入系统时遇到的模糊规则爆炸问题.使设计的实用模糊控制器成为可能。融合函数的设计方法还可推广应用到一级、三级倒立摆系统中。该模糊控制器设计切实可行,能较好地控制系统,达到较好的控制效果。模糊控制具有鲁棒性和稳定性好、算法简单等特点,应用在实时性要求较高的场合,该控制方法也可应用到其他多变量、非线性系统的控制问题。
参考文献:
【l】许超.若干力学系统的数学建模与稳定性研究【D】.杭州:
浙江大学.2005.
【2】张乃尧.倒立摆的双闭环模糊控制【J】.清华大学,1996,ll
(1):85—89.
『31郭钊侠。方建安,苗清影.倒立摆系统及其智能控制研究
【J1.东华大学,2003,29(2):122一125.
[41李国勇.智能控制及其MATLAB实现[M】.北京:电q-工业
出版社.2005.
【51汤兵勇,路林吉,王文杰.模糊控制理论与应用技术【M】.北
京:清华大学出版社.2002.
【61席爱民.模糊控制技术[M】.西安:西安电子科技大学出版
社.2008.
一107-

二级倒立摆的模糊控制研究
作者:
作者单位:
刊名:
英文刊名:
年,卷(期):焦灵侠, 张荷芳, JIAO Ling-xia, ZHANG He-fang西安工业大学,电子信息工程学院,陕西,西安,710032电子设计工程ELECTRONIC DESIGN ENGINEERING2009,17(10)
参考文献(6条)
1.席爱民 模糊控制技术 2008
2.汤兵勇;路林吉;王文杰 模糊控制理论与应用技术 2002
3.李国勇 智能控制及其MATLAB实现 2005
4.郭钊侠;方建安;苗清影 倒立摆系统及其智能控制研究 2003
5.张乃尧 倒立摆的双闭环模糊控制 1996
6.许超 若干力学系统的数学建模与稳定性研究 2005
本文链接:http://d..cn/Periodical_dzsjgc200910039.aspx