电信学院毕业设计(论文)开题报告

第二篇:课题报告
课题报告
姓名:杨乐
班级:自动化0902
课题:对自动控制中的球杆控制系统
和倒立摆控制系统的调研
通过查阅资料和同学讨论,我们了解到有关自动控制中常用的一些实验平台和实验方法。通过利用实验平台来解决一些控制方面的一些问题。下面分别对两个控制系统进行介绍。
倒立摆控制系统
倒立摆控制系统是一个非线性不稳定的系统,由于它的复杂性、多变量和高阶次性,人们通常把它视为进行控制理论教学和开展各种控制实验的理想实验平台。在控制中遇到的一些典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等。可以通过倒立摆控制系统直观的表现出控制系统的稳定性、可控性和系统抗干扰能力等。同时通过对倒立摆系统的控制可以检测控制方法处理非线性和不稳定性问题的能力。倒立摆控制系统的非线性、高阶次性、多变量性和不稳定性使得许多现代控制理论的研究人员一直将它视为研究对象。同时,其控制方法在军工、航天、机器人和一般工业过程领域中都有着广泛的用途,如机器人行走过程中的平衡控制、火箭发射中的垂直度控制和卫星飞行中的姿态控制等。
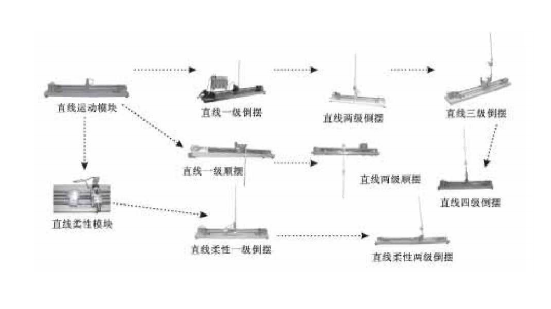
倒立摆控制系统从摆杆的数量上可分为一级、两级、三级和四级倒立摆。多级摆的摆杆之间属于自有连接(即无电动机或其他驱动设备)。四级倒立摆由中国的北京师范大学李洪兴教授领导的“模糊系统与模糊信息研究中心”暨复杂系统智能控制实验室采用变论域自适应模糊控制成功地实现的。我国是世界上第一个成功完成四级倒立摆实验的国家。
倒立摆控制系统包含倒立摆本体、电控箱及由运动控制卡和普通PC机组成的控制平台等三大部分。倒立摆控制系统也可以分为直线倒立摆、环形倒立摆、平面倒立摆和复合倒立摆。其中平面倒立摆是在可以做平面运动的运动模块上装有摆杆组件,平面运动模块主要有两类:一类是XY运动平台,另一类是两自由度SCARA机械臂。摆杆组件也有一级、两级、三级和四级很多种。复合倒立摆为一类新型倒立摆,由运动本体和摆杆组件组成,其运动本体可以很方便的调整成三种模式:一是环形倒立摆,还有把本体翻转90度,连杆竖直向下和竖直向上组成托摆、顶摆这两种形式的倒立摆。按倒立摆的级数来分:有一级倒立摆、两级倒立摆、三级倒立摆和四级倒立摆。一级倒立摆常用于控制理论的基础实验,多级倒立摆常用于控制算法的研究,倒立摆级数越高,其控制难度越大,目前可以实现的倒立摆控制最高为四级倒立摆。
系统的特性
虽然倒立摆的形式和结构各异,但所有的倒立摆都具有以下特性。
1非线性
倒立摆是一个典型的非线性复杂系统,实际中可以通过线性化得到系统的近似模型,线性化处理后再进行控制。也可以利用非线性控制理论对其进行控制。倒立摆的非线性控制正成为一个研究的热点。
2、不确定性
主要是模型误差以及机械传动间隙,各种阻力等,实际控制中一般通过减少各种误差来降低不确定性,如通过施加预紧力减少皮带或齿轮的传动误差,利用滚珠轴承减少摩擦阻力等不确定因素。
3、耦合性
倒立摆的各级摆杆之间,以及和运动模块之间都有很强的耦合关系,在倒立摆的控制中一般都在平衡点附近进行耦合计算,忽略一些次要的耦合量。
4、开环不稳定性
倒立摆的平衡状态只有两个,即在垂直向上的状态和垂直向下的状态。其中垂直向上为绝对不稳定的平衡点,垂直向下为稳定的平衡点。
倒立摆控制系统的核心内容是控制器的设计,因为倒立摆是一个绝对不稳定的系统,为使其保持稳定并且可以承受一定的干扰,需要给系统设计控制器,目前典型的控制器设计理论有:PID控制、根轨迹以及频率响应法、状态空间法、最优控制理论、模糊控制理论、神经网络控制、拟人智能控制、鲁棒控制方法、自适应控制,以及这些控制理论的相互结合组成更加强大的控制算法。
人们对倒立摆的控制问题研究的主要目标是使摆杆尽快的达到一个平衡位置。并且使之没有大的振荡和过大的角度和速度。当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。
系统的工作原理
倒立摆控制系统的输入为小车位移(即位置)和摆杆的倾斜角度(期望值)。计算机在每一个采样周期中采集来自传感器的小车与摆杆的实际位置信号,与期望值进行比较后,通过控制算法得到控制量,再经数模转换驱动直流电机实现倒立摆的实时控制。直流电机通过皮带带动小车在固定的轨道上运动,摆杆的一端安装在小车上,能以此点为轴心使摆杆能在垂直的平面上自由地摆动。作用力u平行于铁轨的方向作用于小车,使杆绕小车上的轴在竖直平面内旋转,小车沿着水平铁轨运动。当没有作用力时,摆杆处于垂直的稳定的平衡位置(竖直向下)。为了使杆子摆动或者达到竖直向上的稳定,需要给小车一个控制力,使其在轨道上被往前或朝后拉动。
球杆系统
球杆系统是为自动控制、机械电子、电气工程等专业的基础控制课程而设计的教学实验设备,该系统包含了许多经典的和现代的设计方法。因为球杆系统具有开环不稳定的这一特性,不稳定系统的控制问题成为大多数控制系统需要克服的难点,有必要在实验室中研究。因为大多数不稳定控制系统都是不安全的,这成了研究控制系统的一大障碍,而球杆系统就是解决这一矛盾最好的实验工具,它简单、安全并且具备了一个不稳定系统所具有的动态特性。可满足自动控制原理、现代控制工程等课程的实验要求,也可以作为电机学、电机与拖动、模式识别等课程的实验设备。
系统的结构
球杆系统整个装置由球杆执行系统、控制器和直流电源等部分组成。该系统对控制系统设计来说是一种理想的实验模型。由于系统的结构简单,因此比较容易观察模型的控制过程。
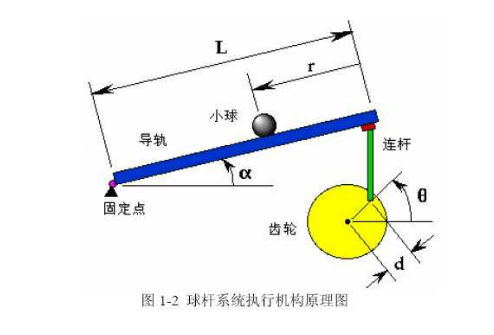
球杆执行系统由一根v型轨道和一个不锈钢球组成。V型槽轨道一侧为不锈钢杆,另一侧为直线位移电阻器。当球在轨道上滚动时,通过测量不锈钢杆上输出电压可测得球在轨道上的位置。V型槽轨道的一端固定,另一端则由直流电机经过两级齿轮减速,再通过固定在大齿轮上的连杆带动进行上下往复运动。V型槽轨道与水平线夹角可通过测量大齿轮转动角度和简单的几何计算获得。这样通过设计控制器来控制小球在轨道上的位置。
系统的工作原理
此系统为一个单输入(电机转角?)、单输出(小球位置x)系统,输入量 ?利用伺服电机自带角度编码器来测量,输出量x由轨道上电位器的电压信号来获得。
系统包括计算机、IPM100智能伺服驱动器、球杆本体和光电码盘、线性传感器几大部分,组成了一个闭环系统。光电码器将杠杆臂与水平方向的夹角、角速度信号反馈给伺服驱动器和运动控制卡,小球的位移、速度信号由直线位移传感器反馈回控制卡。计算机从
运动控制卡中读取实时数据,当鼠标或键盘输入小球的控制位置时,由计算机确定控制决策(?应向哪个方向转动、转动速度、加速度等),并由运动控制卡来实现该控制决策,产生相应的控制量使电机转动,带动杠杆臂运动,使小球的位置得到控制。
球杆系统最重要的两部分是电气部分和机械部分。
电气部分:a小球滚动时位移的测量,直线位移传感器线性轨道传感器接+5V电压,轨道两边测得的电压作为IPM控制卡A\D输入口的信号。当小球在轨道上滚动时,通过不锈钢上输出的电压信号的测量可得到小球在轨道上的位置。b伺服电机输出角度的测量,采用IPM100控制器,电机驱动齿轮转动时角度编码用于测量?。
机械部分:整个机构运行如下,电机转动带动与杠杆相连的齿轮转动,此时连接点与水平方向会有一角度?(角度?应该被限定在±80°以内),轨道会绕左侧与固定座铰链处转动,轨道与水平方向的角度?。此处角度编码器用于测量角度? 。
运用于球杆系统常用的控制理论有以下几种。
1 PID控制,PID控制是一种简单易懂的通用控制器,用于控制简单的过程。在对球杆系统进行运动学和动力学分析后,得到系统的非线性物理模型。线性化后得到球杆系统的状态方程。根据状态方程设计PID控制器,以满足球杆系统的瞬态和稳态性能指标。PID控制也可以不用得到系统的状态方程,直接借助实验的方法设计PID控制器。
2根轨迹及其频率响应法,根轨迹法是利用开环零点、极点在S平面的分布,通过图解的方法求的闭环极点的位置。根轨迹法可以比较快的获得近似的结果。在球杆系统中,通过建模分析得到球杆系统的开环传递函数,做出其根轨迹图,可以得到其闭环传递函数在位于S平面虚轴的极点,说明系统的临界稳定。可以采用增加零极点方法校正系统,把临界稳定的系统转化为稳定的系统。
3状态空间法,极点配置法通过设计状态反馈控制器将多变量系统的闭环系统的极点配置到期望的位置上,从而使系统满足工程师提出的瞬态和稳态性能指标。
4 模糊控制,经典的模糊控制器利用模糊集合理论将专家知识或操作人员经验形成的语言规则直接转化为自动控制决策(通常是专家模糊规则查询表),其设计不依靠对象的精确模型,而是利用其语言知识模型进行设计和修正控制算法。在许多情况下,将模糊控制和PID控制两者结合起来,扬长避短,既具有模糊控制的灵活、适应性强、快速性好的优点,又具有PID控制精度高的特点。