一:1.数值分析的特点:1)首先要有可靠的理论分析,以确保算法在理论上的收敛性和数值上的稳定性。2)其次要对计算的结果进行误差估计,以确定其是否满足精度。3)还要考虑算法的运行效率即算法的运算量和存储量。
2.数值分析的误差种类:1)截断误差:模型的准确解与数值方法准确解之间的误差。
2)舍入误差:实数形式的原始数据与有限字长计算机数据间的误差。
3.算法的数值稳定性与病态问题:1)若某算法受初始误差或运算过程中的舍入误差影响较小,则称为数值稳定。2)若微小的初始误差都会对最终结果产生极大的影响,则称之为病态问题。
二:1.Runge现象及其解决方法
Runge现象即高次插值的振荡现象,指增加节点固然能使插值函数 p(x)与被插值函数f(x)在更多的地方相等,但在两点之间p(x)不一定能很好地近似f(x),有时候误差非常大。
解决方法:分段低次插值(将插值区间分成若干小区间,在小区间内用低次插值)
2.样条插值思想:插值函数p(x)在插值区间[a,b]上有二阶光滑度,在分段的小区间
[xk,xk+1]上是低次多项式,同时满足p(xi)=yi.
三:理解逼近问题与拟合问题:1)逼近问题:函数f(x)在区间[a,b]具有一阶光滑度,求多项式p(x)是f(x)-p(x)在某衡量标准下最小的问题。 2)拟合问题:从理论上讲y=f(x)是客观存在的,但在实际中,仅仅从一些离散的数据(xi,yi)(i=1,2…)是不可能求出f(x)的准确表达式,只能求出其近似表达式φ(x)。
插值问题与逼近问题的特点和区别:1)相同点:它们都是求某点值的算法。
2)不同点:A,被插值函数是未知的,而被逼近函数是已知的。B,插值函数在节点处与被插值函数相等。而逼近函数的值只要满足很好的均匀逼近即可。C,求p(x)的方法不同。
四:Romberg求积法和Gauss求积法的基本思想:
1)复化求积公式精度较高,但需要事先确定步长,欠灵活性,在计算过程中将步长逐次减半得到一个新的序列,用此新序列逼近I的算法为Romberg求积法。
2)对插值型求积公式,若能选取适当的xk.Ak使其具有2n+1阶代数精度,则称此类求积公式为Gauss型。
五.Runge-Kutta方法的基本思想:
借助于Taylor级数法的思想,将yn+1=yn+hy’(ξ)中的y’(ξ)(平均斜率)表示为f在若干点处值的线性组合,通过选择适当的系数使公式达到一定的阶。
第二篇:数值分析小总结
第一章:模型误差;观测误差或数据误差;方法误差或截断误差:舍入误差;、
绝对误差:设 为准确值,
为准确值, 为的一个近似值,称
为的一个近似值,称 =
= -为近似值的绝对误差;相对误差:近似值
-为近似值的绝对误差;相对误差:近似值 的误差
的误差 与准确值的比值
与准确值的比值 =
= ;相对误差可正可负,它的绝对值上界成为相对误差限,记为
;相对误差可正可负,它的绝对值上界成为相对误差限,记为 ;
;
误差公式: ,
, ,
, ;避免误差危害原则:1.避免两个相近的数相减;2.防止重要的小数被大数吃掉;3.避免除数绝对值远远小于被除数绝对值的除法。
;避免误差危害原则:1.避免两个相近的数相减;2.防止重要的小数被大数吃掉;3.避免除数绝对值远远小于被除数绝对值的除法。
第二章:线性插值(两点式):
抛物线插值:



拉格朗日插值多项式:



插值余项:
均差(差商):
一阶均差 ;
;
二阶均差:
设 是m次多项式,则
是m次多项式,则 恒等于零。
恒等于零。
牛顿插值多项式:
两个节点的三次埃尔米特插值:


最小二乘拟合曲线:
最佳一次平方逼近:所求函数

第三章:梯形公式:
中矩形公式: ;
;
代数精度:m次准确,m+1次不准确。
高斯求积公式:
如果 具有2n+1次代数精度,则称这组节点
具有2n+1次代数精度,则称这组节点 为高斯点,公式为带权
为高斯点,公式为带权 的高斯求积公式。
的高斯求积公式。
辛普森求积公式具有3次代数精度。
改进的欧拉公式的精度是2次。
牛顿-柯特斯求积公式的系数和 =1
=1
第四章:A=LU,
L为下三角矩阵,U为上三角矩阵。
步骤:1.计算U的第1行,L的第1列:

2.计算U的第r行,L的第r行(r=2,…)

具体求解3阶方程组:




矩阵范数: ;
; ;
;
谱半径:特征值模的最大值为矩阵的谱半径。
 ;
;
条件数:
 ;
;
第五章:雅克比迭代矩阵
 ,
,
<1收敛,>1发散。
雅克比迭代矩阵形式:A=D-L-U,Ax=b→
(D-L-U)x=b,x = D-1(L+U)x+D-1b
x(k+1)= D-1(L+U)x(k)+D-1b,
 ,
, ,
,
高斯-赛德尔迭代矩阵:
 ,
,
矩阵形式:X(k+1)=(D-L)-1UX(k)+(D-L)-1b
严格对角占优矩阵:
若A为严格对角占优矩阵,则雅克比和高斯迭代法均收敛。
求迭代次数公式:

第六章:幂法


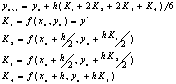
第七章:四阶龙格-库塔公式:
第八章:收敛判断条件:不动点 ,如果
,如果 ,则
,则 收敛。
收敛。
牛顿法2阶收敛。
用牛顿迭代法求近似值:首先构造f(x),然后利用 迭代,直到计算结果相同。
迭代,直到计算结果相同。