计算机控制技术课程设计指导书
编写:樊兆峰
韩成春
信电学院
20##年5月18日
《计算机控制技术》课程设计指导书
一、 课程设计目的:
本课程设计是《计算机控制技术》的后续课程,它是结合《计算机控制技术》课程知识对所学专业知识的一次较为广泛的综合训练课程;是完成教学计划达到教学目标的重要环节。通过课程设计使学生掌握系统建模、控制器设计、稳定性分析、时域响应分析等,并通过设计相关硬件电路,编写程序实现计算机控制,来提高学生对所学知识的综合运用能力。
二、 课程设计题目:
题目1:储水罐液位控制系统设计
题目2:直流电机调速控制系统设计
题目3:电烤箱温度控制系统设计
题目4:静态称重测控系统设计
题目5:数字位置随动控制系统设计
题目6:阀门定位控制系统设计
三、 课程设计内容:
本课程设计主要包括以下六个方面内容:
1) 控制系统工作原理说明;
2) 系统建模与总体控制方案设计;
3) 传感器与执行机构选型设计;
4) 控制器设计;
5) 硬件电路设计;
6) 软件设计;
四、 时间安排:
课程设计安排两周时间。
五、 分组安排:
由指导教师安排分组。
六、 设计报告的撰写:
学生所撰写的设计报告应符合以下三个方面的要求:
1) 设计报告的撰写应使用指定的格式,详细要求参见模板;
2) 设计报告要涵盖课程设计内容;
3) 控制方案设计要有不同方案的比较,控制器的设计与实现要有详细地计算说明及实现过程描述,硬件电路设计要有元器件型号选择及数值计算说明,无需计算的要说明原因,软件部分给出流程图并作详细说明,完整的电路图及编写的程序以附录形式附后。
七、 主要参考资料:
[1] D.Ibrahim. Microcontroller Based Applied Digital Control [M] .John Wiley & Sons. 2006.
[2] 戴文进 等.电机与拖动[M] .清华大学出版社, 2008.
[3] 陈伯时.电力拖动自动控制系统[M] .机械工业出版社, 2011.
[4] 顾德英 等.计算机控制技术[M] .北京邮电大学出版社, 2007.
[5] 谢维成 等.单片机原理与应用及C51程序设计[M] .清华大学出版社, 2006.
[6] 高金源.计算机控制系统-理论、设计与实现[M].北京航空航天大学出版社,2001.
[7] 于海生.计算机控制技术[M].北京:机械工业出版社,2007.
[8] 姜学军.计算机控制技术[M].北京:清华大学出版社,2005.
[9] 范立南.单片微型计算机控制技术设计[M].北京:人民邮电出版社,2007.
题目1:储水罐液位控制系统设计
题目说明:
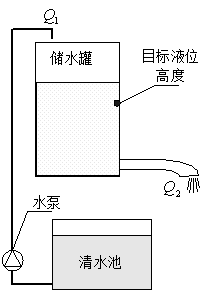
被控系统为一储水罐。系统如图1所示,储水罐内为清水,下部设有出水管,流量记为Q2。储水罐通过水泵将清水池内的清水补入罐内,流量记为Q1,清水池内的水位可视为固定值2米(即在储水罐补水过程中液位不变化)。已知储水罐的截面积A=1平方米,高度H=2米,要求控制目标液位高度为1米。
设计要求:
1. 要求控制系统调节时间ts≤2分钟,超调量≤10%。
2. 设计人机接口实时显示储水罐液位高度。
 设计指导:
设计指导:
控制系统建模过程中,出水管流阻R的
确定可使用实验法或查询文献来确定。
水泵的选型要考虑调节时间的限制。
传感器选型时要考虑分辨率及量程。
为便于分析设计,水泵的控制量与流量
Q1的关系可作适当简化。
驱动电路的设计要与所选的水泵匹配。
图1 储水罐系统示意图
题目2:直流电机调速控制系统设计
题目说明:
被控直流电机技术参数如表1所示:
表1 直流电机技术参数表

设计要求:
1. 要求电机转速控制为可调,在系统中设计转速实时显示。
2. 超调量≤10%。
设计指导:
先建立直流电机的数学模型,然后根据要求设计控制器,控制方法在满足要求的前提下要进行方案比较。电机控制模型中的相关参数可作简化,也可以查阅相关文献选取。
题目3:电烤箱温度计算机控制系统设计
题目说明:
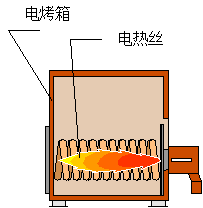
被控系统为电烤箱。系统如图2所示,电烤箱为一封闭长方体结构,烤箱内尺寸:0.8m×0.6m×0.4m,加热器件为一1kw(220v)电热丝。
设计要求:
1. 当控制设定100℃时,从室温开始升温要求控制系统调节时间ts≤5分钟,超调量≤10%。
2. 要求控制温度范围为50~200℃连续可调。
3. 用数码管实时显示箱内温度。
 设计指导:
设计指导:
控制系统建模过程中,相关未知参数的
确定可使用实验法或查询文献来确定。
传感器选型时要考虑分辨率及量程。
为便于分析设计,可作适当简化。
驱动电路的设计要与电热丝匹配。
也可使用工程实验法来辨识系统数学模型。
图2 电烤箱示意图
题目4:静态称重测控系统设计
题目说明:
利用单片机实现静态称称重系统。静态称托盘规格为300mm×200mm,需用压力传感器来获得托盘上的被测物重量。见图4。
设计要求:
1. 被测物测量范围为0-4000g,压力传感器数量和配置各组自行确定。
2. 要求最小分辨率为0.1g。
3. 采用数码显示器显示被测重量。
设计指导:
根据设计要求选择合适的A/D转换芯片和单片机规格。在选用的A/D转换芯片的基础上设计测量放大电路对传感器的输出结果进行放大。并实现键盘输入对系统参数进行设置。
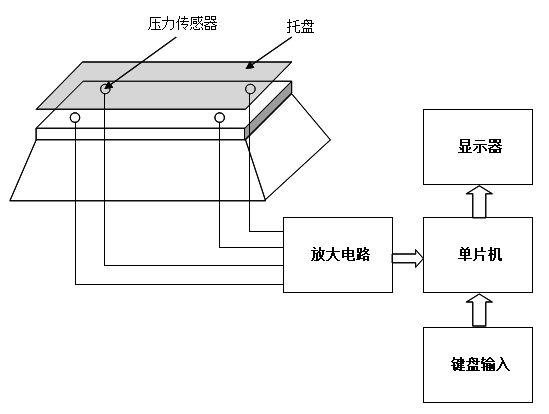
图4 静态称重测控系统示意图
题目5:数字位置随动控制系统设计
题目说明:
利用位置传感器和直流电动机的位置随动系统,见图5。该系统是利用位置传感器形成位置环,由所选定的单片机来完成数字控制器。
设计要求:
1. 定位精度0.4°。
2. 定位过程超调量<10%。
3. 输入阶跃、速度、加速度转角信号时,调节时间为250ms。。
设计指导:
利用单片机实现全数字位置随动系统,由键盘输入PID参数及给定值。利用功能键实现点动和自动以及复位。直流电动机实现可逆运行,并由位置传感器(如光电码盘等)检测转角信号,经频压转换电路实现位置检测。控制器参数可以用SIMULINK仿真确定,但为了实现系统快速性好、超调小和无静差的控制要求,设计中可采用积分分离式PID控制算法。(注:控制算法也可以自行设计)
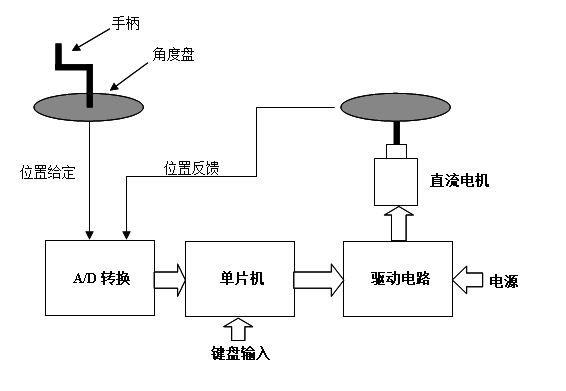
图5 全数字位置随动系统示意图
题目6:阀门定位控制系统设计
题目说明:
利用单片机实现阀门定位的单片机控制系统,见图6,通过位置传感器检测气缸位置,再进行控制调节阀的开度。
设计要求:
1. 要求阀开度大于90或小于10%,以及阀心被卡住时,进行报警。
2. 要求具有调节阀线圈的故障诊断功能
3. 用数码管实时阀位开度。
设计指导:
利用位置传感器检测位置,反馈到单片机中作为反馈模拟信号,经单片机内PID控制算法进行信号处理后输出一定宽度的脉冲来驱动调节阀并实现定位反馈控制。由键盘输入阀门的工作量特性以及阀心的最大、最小行程等参数。采用功能键实现点动和自动以及复位。定位速率由各组自行设定,即确定PID控制算法参数。
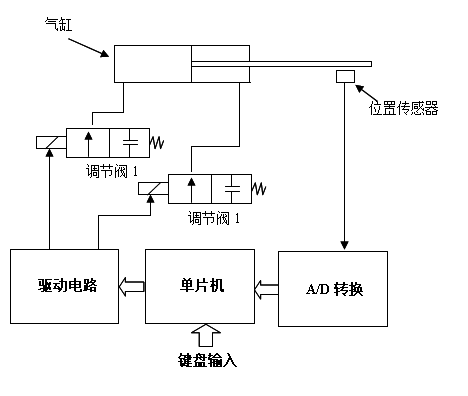
图6 阀门定位控制系统示意图
第二篇:THBDC-1计算机控制技术实验指导书(A4)
THBDC-1计算机控制技术实验指导书
实验一 离散化方法研究
一、实验目的
1.学习并掌握数字控制器的设计方法;
2.熟悉将模拟控制器D(S)离散为数字控制器的原理与方法;
3.通过数模混合实验,对D(S)的多种离散化方法作比较研究,并对D(S)离散化前后闭环系统的性能进行比较,以加深对计算机控制系统的理解。
二、实验设备
1.THBDC-1型 控制理论·计算机控制技术实验平台
2.THBXD数据采集卡一块(含37芯通信线、16芯排线和USB电缆线各1根)
3.PC机1台(含软件“THBDC-1”)
三、实验内容
1.按连续系统的要求,照图3-1的方案设计一个与被控对象串联的模拟控制器D(S),并用示波器观测系统的动态特性。
2.利用实验平台,设计一个数-模混合仿真的计算机控制系统,并利用D(S)离散化后所编写的程序对系统进行控制。
3.研究采样周期TS变化时,不同离散化的方法对闭环控制系统性能的影响。
4.对上述连续系统和计算机控制系统的动态性能作比较研究。
四、实验原理
由于计算机的发展,计算机及其相应的信号变换装置(A/D和D/A)取代了常规的模拟控制。在对原有的连续控制系统进行改造时,最方便的办法是将原来的模拟控制器离散化,其实质是将数字控制部分(A/D、计算机和D/A)看成一个整体,它的输入与输出都是模拟量,因而可等效于一个连续的传递函数D(S)。这样,计算机控制系统可近似地视为以D(S)为控制器的连续控制系统。
下面以一个具体的二阶系统来说明D(S)控制器的离散化方法。
1、二阶系统的原理框图如图3-1所示。
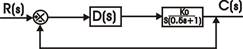
图3-1 二阶对象的方框图
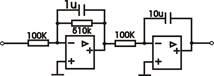
图3-2 二阶对象的模拟电路图
2、系统性能指标要求
系统的速度误差系数 1/s ,超 调量
1/s ,超 调量 ,系统的调整时间
,系统的调整时间 s
s
据Kv要求可得:

 ,
,
令 ,则校正后的开环传递函数为
,则校正后的开环传递函数为

由上式得  ,
, ,取
,取 ,则
,则

 所以校正后系统的模拟电路图如下图所示。
所以校正后系统的模拟电路图如下图所示。
图3-3 校正后二阶系统的模拟电路图
 ,为使校正后的
,为使校正后的 ,要求对象K由5增至10。
,要求对象K由5增至10。
 ,
,
 ,
, (实际可取200K电阻),
(实际可取200K电阻),
3、 的离散化算法
的离散化算法

图3-4 数—模混合控制的方框图
图3-3中的离散化可通过数据采集卡的采样开关来实现。
传递函数与Z传递函数间的相互转换,可视为模拟滤波器与数字滤波器之间的转换。常用的转换方法有:
a) 阶跃响应不变法(或用脉冲响应法);b) 后向差分法;c) 双线性变换
1) 阶跃跃响应不变法

 -数字滤波器在阶跃作用下输出响应的
-数字滤波器在阶跃作用下输出响应的
 -模拟滤波器在阶跃作用下输出响应的采样值
-模拟滤波器在阶跃作用下输出响应的采样值
 ,
, 


据此得
即 
2) 后向差分法
令  ,
,
后向差分S与Z之间关系为
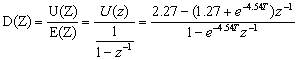
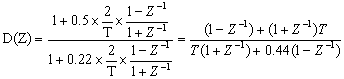
 ,代入D(S)表达式中得
,代入D(S)表达式中得
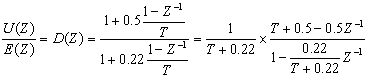
于是得

3) 双线性变换
由泰勒级数得  ,
,
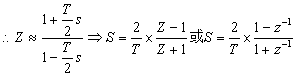 ,代入D(s)得
,代入D(s)得

即 
五、实验步骤
1、实验接线及准备
1.1 按图3-2连接一个二阶被控对象的模拟电路;
1.2,用导线将该电路的输入端连接到数据采集卡的“DA1”输出端,电路的输出端与数据采集卡的“AD1”输入端相连;
1.3待检查电路接线无误后,打开实验平台的电源总开关,并按下锁零按钮使其处于“锁零”状态;
2、脚本程序运行
2.1启动计算机,在桌面双击图标“THBDC-1”,运行实验软件;
2.2顺序点击虚拟示波器界面上的“ ”按钮和工具栏上的 “
”按钮和工具栏上的 “ ” 按钮(脚本编程器);
” 按钮(脚本编程器);
2.3在脚本编辑器窗口的文件菜单下点击“打开”按钮,并在“计算机控制算法VBS\计算机控制技术基础算法\D(S)离散化方法研究”文件夹下选中“阶跃响应不变法”脚本程序并打开,阅读、理解该程序,然后点击脚本编辑器窗口的调试菜单下“步长设置”,将脚本算法的运行步长设为100ms;点击脚本编辑器窗口的调试菜单下“启动”;弹起锁零按钮使其处于“解锁”状态,用虚拟示波器观察图3-2输出端的响应曲线。结束本次实验后按下锁零按钮使其处于“锁零”状态;
2.4参考步骤2.3,用同样的方法分别运行后向差分法和双线性变换脚本程序,用虚拟示波器观察图3-2输出端的响应曲线;
2.5将采样周期Ts减小或增大,重复步骤2.3和2.4,用虚拟示波器观测采样周期Ts的减小或增大对系统阶跃响应的影响。如系统出现不稳定情况,记下此时的采样周期Ts和所采用的离散化方法;
2.6按图3-3连接二阶被控对象在加入模拟控制器(PID校正装置)后的模拟电路,并在其输入端输入2V的阶跃信号,然后观察其响应曲线,并与前面2.3和2.4步骤中采用数字控制器的实验曲线相比较;
2.7 实验结束后,关闭脚本编辑器窗口,退出实验软件。
注:为了更好的观测实验曲线,实验时可适当调节软件上的分频系数(一般调至刻度2)和选择“ ”按钮(时基自动),以下实验相同。
”按钮(时基自动),以下实验相同。
六、实验报告要求
1.绘出实验中二阶被控对象在加入模拟控制器(PID校正装置)前后的响应曲线。
2.编写数字控制器(阶跃响应不变法)的脚本程序。
3.绘出二阶被控对象在采用数字控制器后的响应曲线,并分析采样周期Ts的减小或增大对系统阶跃响应的影响。
七、附录
3.数字控制器(阶跃响应不变法)的程序编写与调试示例
dim pv,sv,ei,eix,op,opx,Ts ‘变量定义
sub Initialize(arg) ‘初始化函数
WriteData 0 ,1
eix=0
opx=0
end sub
sub TakeOneStep (arg) ‘算法运行函数
pv = ReadData(1) ‘采集卡通道AD1的测量值
sv=2 ‘给定值
Ts=0.1 ‘采样周期
ei=sv-pv ‘控制偏差
op=exp(-4.54*Ts)*opx+(2.27*ei-(1.27+exp(-4.54*Ts))*eix)*0.45 ‘控制器输出值
eix=ei ‘eix为控制偏差的前项
opx=op ‘opx为控制输出的前项
if op<=-4.9 then ‘输出值限幅
op=-4.9
end if
if op>=4.9 then
op=4.9
end if
WriteData op ,1 ‘控制信号从DA1端口输出
end sub
sub Finalize (arg) ‘退出函数
WriteData 0 ,1
end sub
双线性变换法、后向差分变换法对D(S)离散化后的请参考“THBDC-1”安装目录下的“计算机控制算法VBS\计算机控制技术基础算法\ D(S)离散化方法研究”目录内参考示例程序。
实验二 数字PID调节器算法的研究
一、实验目的
1.学习并熟悉常规的数字PID控制算法的原理;
2.学习并熟悉积分分离PID控制算法的原理;
3.掌握具有数字PID调节器控制系统的实验和调节器参数的整定方法。
二、实验设备
1.THBDC-1型 控制理论·计算机控制技术实验平台
2.THBXD数据采集卡一块(含37芯通信线、16芯排线和USB电缆线各1根)
3.PC机1台(含软件“THBDC-1”)
三、实验内容
1.利用本实验平台,设计并构成一个用于混合仿真实验的计算机闭环实时控制系统;
2.采用常规的PI和PID调节器,构成计算机闭环系统,并对调节器的参数进行整定,使之具有满意的动态性能;
3.对系统采用积分分离PID控制,并整定调节器的参数。
四、实验原理
在工业过程控制中,应用最广泛的控制器是PID控制器,它是按偏差的比例(P)、积分(I)、微分(D)组合而成的控制规律。而数字PID控制器则是由模拟PID控制规律直接变换所得。
在PID控制规律中,引入积分的目的是为了消除静差,提高控制精度,但系统中引入了积分,往往使之产生过大的超调量,这对某些生产过程是不允许的。因此在工业生产中常用改进的PID算法,如积分分离PID算法,其思想是当被控量与设定值偏差较大时取消积分控制;当控制量接近给定值时才将积分作用投入,以消除静差,提高控制精度。这样,既保持了积分的作用,又减小了超调量。
五、实验步骤
1、实验接线
1.1按图4-1和图4-2连接一个二阶被控对象闭环控制系统的电路;
1.2该电路的输出与数据采集卡的输入端AD1相连,电路的输入与数据采集卡的输出端DA1相连;
1.3待检查电路接线无误后,打开实验平台的电源总开关,并将锁零单元的锁零按钮处于“解锁”状态。
2、脚本程序运行
2.1启动计算机,在桌面双击图标“THBDC-1”,运行实验软件;
2.2顺序点击虚拟示波器界面上的“”按钮和工具栏上的 “” 按钮(脚本编程器);
2.3在脚本编辑器窗口的文件菜单下点击“打开”按钮,并在“计算机控制算法VBS\计算机控制技术基础算法\数字PID调器算法”文件夹下选中“位置式PID”脚本程序并打开,阅读、理解该程序,然后点击脚本编辑器窗口的调试菜单下“步长设置”,将脚本算法的运行步长设为100ms;
2.4点击脚本编辑器窗口的调试菜单下“启动”;用虚拟示波器观察图4-2输出端的响应曲线;
2.5点击脚本编辑器的调试菜单下“停止”,利用扩充响应曲线法(参考本实验附录4)整定PID控制器的P、I、D及系统采样时间Ts等参数,然后再运行。在整定过程中注意观察参数的变化对系统动态性能的影响;
2.6 参考步骤2.4、2.4和2.5,用同样的方法分别运行增量式PID和积分分离PID脚本程序,并整定PID控制器的P、I、D及系统采样时间Ts等参数,然后观察参数的变化对系统动态性能的影响。另外在积分分离PID程序运行过程中,注意不同的分离阈值tem对系统动态性能的影响;
2.7 实验结束后,关闭脚本编辑器窗口,退出实验软件。
六、实验报告要求
1.绘出实验中二阶被控对象在各种不同的PID控制下的响应曲线。
2.编写积分分离PID控制算法的脚本程序。
3.分析常规PID控制算法与积分分离PID控制算法在实验中的控制效果。
七、附录
1.被控对象的模拟与计算机闭环控制系统的构成

图4-1 数-模混合控制系统的方框图
图中信号的离散化通过数据采集卡的采样开关来实现。
被控对象的传递函数为:

它的模拟电路图如下图所示
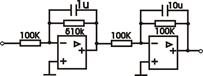
图4-2 被控二阶对象的模拟电路图
2.常规PID控制算法
常规PID控制位置式算法为

对应的Z传递函数为

式中Kp---比例系数
Ki= 积分系数,T采样周期
积分系数,T采样周期
Kd= 微分系数
微分系数
其增量形式为

3.积分分离PID控制算法
系统中引入的积分分离算法时,积分分离PID算法要设置分离阈E0:
当 │e(kT)│≤│E0│时,采用PID控制,以保持系统的控制精度。
当 │e(kT)│>│E0│时,采用PD控制,可使δp减小。积分分离PID控制算法为:

式中Ke称为逻辑系数:
当 │e(k)│≤│E0│时, Ke=1
当 │e(k)│>│E0│时, Ke=0
对应的控制方框图为

图4-3 上位机控制的方框图
图中信号的离散化是由数据采集卡的采样开关来实现。
4.数字PID控制器的参数整定
在模拟控制系统中,参数整定的方法较多,常用的实验整定法有:临界比例度法、阶跃响应曲线法、试凑法等。数字控制器参数的整定也可采用类似的方法,如扩充的临界比例度法、扩充的阶跃响应曲线法、试凑法等。下面简要介绍扩充阶跃响应曲线法。
扩充阶跃响应曲线法只适合于含多个惯性环节的自平衡系统。用扩充阶跃响应曲线法整定PID参数的步骤如下:
① 数字控制器不接入控制系统,让系统处于开环工作状态下,将被调量调节到给定值附近,并使之稳定下来。
② 记录被调量在阶跃输入下的整个变化过程,如下图所示。
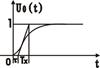
③ 在曲线最大斜率处作切线,求得滞后时间τ和被控对象时间常数Tx,以及它们的比值Tx/τ,然后查下表确定控制器的KP、Ki、Kd及采样周期T。
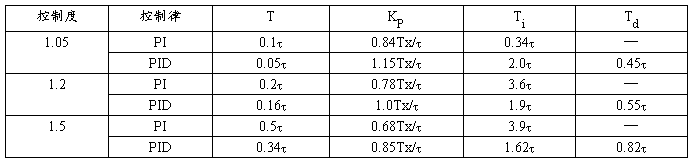
扩充阶跃响应曲线法通过测取响应曲线的τ、Tx参数获得一个初步的PID控制参数,然后在此基础上通过部分参数的调节(试凑)使系统获得满意的控制性能。
5.位置式PID数字控制器程序的编写与调试示例
dim pv,sv,ei,K,Ti,Td,q0,q1,q2,mx,pvx,op ‘变量定义
sub Initialize(arg) ‘初始化函数
WriteData 0 ,1
mx=0
pvx=0
end sub
sub TakeOneStep (arg) ‘算法运行函数
pv = ReadData(1) ‘采集卡AD1通道的测量值
sv=2 ‘给定值
K=0.8 ‘比例系数P
Ti=5 ‘积分时间常数I
Td=0 ‘微分时间常数D
Ts=0.1 ‘采集周期
ei=sv-pv ‘控制偏差
q0=K*ei ‘比例项
if Ti=0 then
mx=0
q1=0
else
mx=K*Ts*ei/Ti ‘当前积分项
end if
q2=K*Td*(pvx-pv)/Ts ‘'微分项
q1=q1+mx
if q1>4.9 then ‘积分限幅,以防积分饱和
q1=4.9
end if
if q1<-4.9 then
q1=-4.9
end if
pvx=pv ‘pvx为测量值的前项
op=q0+q1+q2 ‘PID控制器的输出
if op<=-4.9 then ‘输出值限幅
op=-4.9
end if
if op>=4.9 then
op=4.9
end if
WriteData op ,1 ‘输出值给DA1通道
end sub
sub Finalize (arg) ‘退出函数
WriteData 0 ,1
end sub
位置式PID、积分分离PID控制算法的编程请参考“THBDC-1”安装目录下的“计算机控制算法VBS\计算机控制技术基础算法\数字PID调器算法”目录内参考示例程序。