��������Ƽ����γ���Ʊ���

��Ŀ ��ͨ�ƿ��������
ָ����ʦ ����
�༶ 07�Զ���2��
���� �ºױ� 0705076040
���ﻢ 0705076034
�μ�ɭ 0705076035
���� 2010��6��27��
����Ƭ��ԭ����γ���ơ�
����������

ǰ��
�������ķ�չ����ͨ����Ҳ��ø����أ����Ҫ���кܺõĽ�ͨ����ϵͳ����ͨ�źŵƵij��֣�ʹ��ͨ������Ч���ƣ������赼��ͨ��������ߵ�·ͨ�����������ٽ�ͨ�¹�������Ч�������н�ͨ����ϵͳ�����ڳ��н�ͨ���ݼ�⣬��ͨ�źŵƿ����뽻ͨ�赼�ļ�����ۺϹ���ϵͳ�������ִ����н�ͨ���ָ��������Ҫ�IJ��֡����������ſƼ��ķ��ٷ�չ����Ƭ����Ӧ�����ڲ������룬ͬʱ������ͳ���Ƽ�⼼��������¡���ʵʱ�����Զ����Ƶĵ�Ƭ��Ӧ��ϵͳ�У���Ƭ��������Ϊһ�����IJ�����ʹ�ã�����Ƭ������֪ʶ�Dz����ģ���Ӧ���ݾ���Ӳ���ṹ��Ӳ����ϣ��������ơ�
��ϵͳ���õ�Ƭ��Ϊ������������ƽ�ͨ�ƿ�������ϵͳʵ����ǿ����������չ��ǿ������ƾ��Dz��õ�Ƭ��ģ��ʮ��·�ڽ�ͨ�Ƶĸ���״̬��ʾ��
�����ϵͳ�ɵ�Ƭ��I/O����չϵͳ����ͨ��״̬��ʾϵͳ�ȼ�����ɡ�ϵͳ���л����Ľ�ͨ�ƹ��ܣ��Ϻõ�ģ��ʵ����ʮ��·�ڿ��ܳ��ֵ�״����
�����ϲ��û���̣���Ҫ��д���������жϳ�����ʱ����ȣ����л��õ���ʱ�����������д��һ�������ԣ�����ʵ���˽�ͨ�źŵƹ��ܵ�ģ�⡣
ժҪ����ϵͳ�ɵ�Ƭ��ϵͳ���������ʾ����ͨ����ʾ����������ɡ�ϵͳ��Ҫʵ�ֻ����Ľ�ͨ�ƵĹ��ܣ������ϱ��붫������Ľ�ͨ�ƣ����������̵�����������15s�����Ƶ���3s����ʾ·����ʻ�ij���ֹͣ�� �ϱ������̵�����������15s�����Ƶ���3s����ʾ·����ʻ�ij���ֹͣ��
�ؼ��ʣ�AT89C52������ܣ���ͨ��
һ�����Ŀ��
��1����ǿ�Ե�Ƭ���ͻ�����Ե���ʶ��������պ�������Ƹ����ֵĹ���ԭ������ƹ��̡�ѡ��оƬ������ģ�黯��̵ȶ���֪ʶ��
��2��������֪ʶ��ʵ�����ϣ��õ�Ƭ��ģ��ʵ�־���Ӧ�ã���ַ����Ŷ��������������ʵ���ж�����
��3�����ʵ������������
����������������
1���������
��Ƭ��������AT89C52оƬ��ʹ�÷�������ܣ��죬�ƣ��̣���������·�ڵĽ�ͨ�ƣ�����·�ں��15�룬����·���̵�15�룬�ϱ�·�ں��15�룬�ϱ�·���̵�15�룬�Ƶ�ʱ��3�룩��
2���������
�������ݣ����õ�Ƭ���Ķ�ʱ���������źţ�����ʮ��·�ڵĺ��̻Ƶƽ��������Ϩ��ϵͳ�Ĺ�������һ�㽻ͨ�ƿ���Ҫ��
���� �����Ƚϡ��������֤
1. ��Դ�ṩ����
Ϊʹģ���ȶ����������пɿ���Դ�����ǿ��������ֵ�Դ������
����һ�����ö�������ѹ��Դ���˷������ŵ����ȶ��ɿ������и��ֳ����·�ɹ�ѡ�ã�ȱ���Ǹ�ģ�鶼���ö�����Դ����ʹϵͳ���ӣ��ҿ���Ӱ���·��ƽ��
�����������õ�Ƭ������ģ���ṩ��Դ���ķ������ŵ���ϵͳ������Ҫ����Լ�ɱ���ȱ����������ʲ��ߡ�
��������������ѡ��ڶ��ַ�����
2. ��ʾ���淽��
��ϵͳҪ�����״̬�ơ�ʱ����ʾ���ܡ���������ԭ�����ǿ��������ַ�����
����һ���������ʾ��
��ͳ����ܾ��е��ܺġ�����ġ���ѹ�������������ϻ���ɹ�����������𡢷��ߣ��ͣ��µ��ص㣻����绷��Ҫ��ͣ�����ά����ͬʱ�侫�ȱȽϸߣ���ȷ�ɿ��������������д���ף���Դռ���١������Ҫ����ʾ�����ݽ��٣��������������������ʾ���ɣ��������Ͽ��Ǻ�ѡ��˷�����
����������ȫ���õ���ʽLED ��ʾ��
���ַ���ʵ�ָ��ӣ�������ɴ���������������������ǿ�ɷ������ʾ����Ӣ���ַ������֣�ͼ�εȡ�
������������Һ����ʾ����LCD����ʾʱ��
Һ����ʾ�����й��ĵ͡�����Σ�ա�ƽ��ֱ����ʾ�Լ�Ӱ���ȶ��ȣ������������Ч���ã�Ҳ������ʾ���֣��ֱ��ʸߣ�����������ǿ����ʾ���ݶ���ص㡣��ˣ�ֻҪ��һ��Һ����ʾ���Ϳ�����ʾ���Ҫ���ȫ�����ݡ����⣬Һ����ʾ���뵥Ƭ�����ӵ�·�ϼ���ռ�õ�I/O�ڽ��١�Ȼ��Һ����ʾ�ڱ�д��������Ը��ӣ����ڳ�ѧ��Ƭ�����ö���Һ����ʾ����ôֱ�ۣ��������Dz����ø÷�����
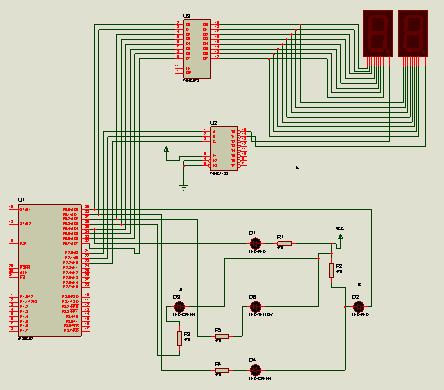
�ġ���·ͼ������ļ�
1���ƿ��Ƶ�·���
��������Ƶĺ��̵��Ƿ�����·�м�ģ���5��LED ��ʵ�ֺ��̻Ƶ�״̬�����з�Ϊ�ϱ���������һ�顣���з�����һ���Ƶ�
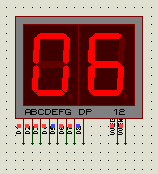
2������ʱ��ʾ��·���
ǰ���Ѿ�����������ĵƵ�״̬�͵���ʱ������ͬ�ģ�����Ϊ�˽�ʡ���ϱ�����������һ������ܡ�
3���˿����

�塢�������˼·������ͼ
1������������ͼ
ϵͳ��������ͼ����ͼ��ʾ��
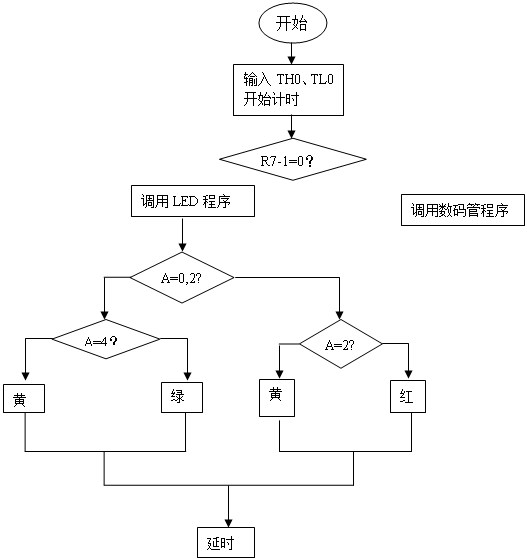



 Y N
Y N
N Y
N Y N Y
�������ԡ����ݼ��������
ϵͳ�ϵ磬��������ɿ�ʼ���ԣ��۲�һ�����ڣ���18�룩�Ƶ���ʾ״̬�Ƿ�������ͬʱ�۲쵹�Ƶļ����Ƿ��������Ƿ���Ƶ�����ͬ����
�ߡ��ܽ�
���������Ƿdz������ۺ��Ե�ʵ�飬����������ʹ�õ���ѭ������ʱ��0���жϵȣ�Ӳ��������ʹ�õ�������ܡ�LED�Ƶȡ�
���ڴ�����ܵĵ���ʱ��ͨ�ƣ���Ҫ�Ƕ�ʱ��0��ʹ�ñȽ�����ս�ԣ�������ʹ�õ����ֳɵĵ�Ƭ�������壬�������������ŵĹ����Ѿ��̶������������һЩоƬ�����磬�ڿ�ʼ�����ʱ���Ҳ�����������ĵ�Ƭ��ʵ��ijɹ����ҳ����Ž�8255�������У����Ǻ��ź�ʧ���ˣ�����һ������Ҫ��ԭ��������ŵĸ������⣬����P2����������ܵ�λѡ������8255��ʹ��������������д�ȵĿ��ơ����������Ҫ����������ƣ�ʹ�ù���ĵ�Ƭ��������ʽ�����ʵģ�����Ҫ�����Լ�������ƣ������������Լ��ĵ�Ƭ����Сϵͳ�������Ժ�Ҳ�����ǵ�Ŭ������
��ογ������Ȼ�����ˣ��������ǵ�ѧϰ����ԶԶû�н������������е�Ӳ����·�����ǻ��кܶ�Ĺ��ܿ���ȥ���ƣ�Ҳ���������Ͽ��ڼ䣬�γ̱Ƚ϶࣬����Ƚ��أ��������������ǻ��кܶ�Ŀ���ʱ�䣬ͨ����ογ���ƣ����������ǶԵ�Ƭ���ͼ�������Ƽ�����Ũ�����Ȥ�����Ժ��ʱ�������һ�������ÿ���ʱ�������ú����еĵ�Ƭ����ѧϰ������
��¼
ϵͳ�����·ͼ��ԭ����ʵ��ͼ��
һ����ͨ��ϵͳ��·ͼ
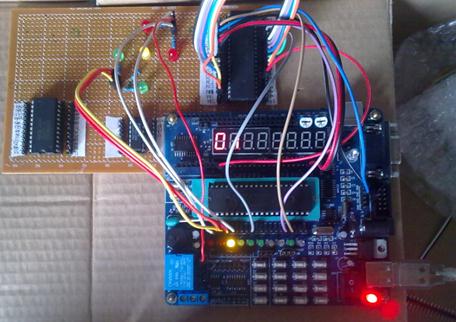
����51��Ƭ������Ʒ���ͼ
������ͨ��ϵͳԴ����
GEWEI EQU 21H ;�����
SHIWEI EQU 23H ;ʮλ����
SCANLED EQU 25H
SCANMODE EQU 26H
RED EQU 28H ;����ƵĻ�����
GREEN EQU 29H
YELLOW EQU 32H
NUMTIM EQU 33H
LED EQU 34H
ORG 000H
JMP START
ORG 0BH
JMP TIMER0 ;��ʱ��0�ж����
ORG 100H
START:MOV SP,#50H
MOV R0,#20H��
MOV R5,#20
CLR0:MOV @R0,#00H
INC R0
DJNZ R5,CLR0 ;Դ��������һ����Ϊ����ת��
MOV TMOD,#01H ;���ö�ʱ������ʱ��0�����ڷ�ʽһ
MOV TH0,#HIGH(65536-5000)
MOV TL0,#LOW(65536-5000)
SETB TR0 ;����ʱ��1
MOV IE,#10000010B ;�˿ڳ�ʼ�� P82�������У����ڲ�T0�ж�
MOV P0,#0FFH ;�����˿ڸ���ֵ
MOV P1,#0FFH
MOV P2,#00H
MOV P3,#0FFH
MOV R3,#10
MOV R2,#3
MOV R1,#10
MOV R7,#200
MOV RED,#15 ;������̵�ʮ�룬�Ƶ�����
MOV YELLOW,#3
MOV GREEN,#15
MOV NUMTIM,#15
MOV LED,#0FFH
AJMP $
TIMER0: PUSH ACC ;��ʱ�����֣�����ͨ�Ƶļ�ʱ������ܶ�̬ɨ��
PUSH PSW ;ACC�ۼ��� PSW����״̬��P23
MOV TH0,#HIGH(65536-5000) ;���¸���ֵ
MOV TL0,#LOW(65536-5000)
DJNZ R7,RET0 ;R7��һ��Ϊ������ת
MOV R7,#200 ;R7���¸�ֵ
MOV A,SCANMODE ;����ɨ��
MOV B,#4
DIV AB ;A��AB֮�̣�B��AB֮��
MOV A,B
RL A ;A��AB��������Aѭ������
MOV DPTR,#TAB_SCAN ;����ܲ��ɨ��
JMP @A+DPTR
TAB_SCAN: AJMP RED_LIGHT ;�������ת
AJMP YEL_LIGHT
AJMP GRE_LIGHT
AJMP YEL_LIGHT
RET0: MOV A,NUMTIM ;��A��ֵ#10
LCALL BIN_BCD ;�����ӳ�����
MOV SHIWEI,A
MOV GEWEI,B
INC SCANLED
MOV A,SCANLED ;��һ��A
MOV B,#4
DIV AB
MOV A,B ;A������
RL A
MOV DPTR,#TAB_SCAN0
JMP @A+DPTR
TAB_SCAN0:AJMP SCAN_L1
AJMP SCAN_L2
SCAN_L1: MOV P2,#0 ;ѡ��ʮλ����ܣ����������Σ�
MOV A,SHIWEI
JMP END_SCAN
SCAN_L2: MOV P2,#1 ;ѡ�и�λ�����
MOV A,GEWEI
JMP END_SCAN
END_SCAN:MOV DPTR,#TABLE ;����� ��
MOVC A,@A+DPTR
MOV P0,A ;����ܶ���
MOV A,LED ;LED��#ffh
MOV P1,A ;�ص����е�
POP PSW
POP ACC
RETI
RED_LIGHT:MOV LED,#0E7H
MOV NUMTIM,RED ;�Ƶļ�ʱʱ��
DEC RED ;�Ƶļ���ֵ�ݼ�
MOV A,RED
CJNE A,#0FFH,RET0 ;������ת��
MOV RED,#10
MOV A,SCANMODE
ADD A,#01H
MOV SCANMODE,A
JMP RET0
YEL_LIGHT:MOV LED,#0FBH
MOV NUMTIM,YELLOW
DEC YELLOW
MOV A,YELLOW
CJNE A,#0FFH,RET0
MOV YELLOW,#3
MOV A,SCANMODE
ADD A,#01H
MOV SCANMODE,A
JMP RET0
GRE_LIGHT:MOV LED,#0FCH
MOV NUMTIM,GREEN
DEC GREEN
MOV A,GREEN
CJNE A,#0FFH,RET1
MOV GREEN,#10
MOV A,SCANMODE
ADD A,#01H
MOV SCANMODE,A
RET1:JMP RET0
BIN_BCD:MOV B,#10
DIV AB
RET
DELAY: MOV R5,#02
D1: MOV R6,#200
D2: MOV R7,#200
DJNZ R7,$
DJNZ R6,D2
DJNZ R5,D1
RET
TABLE: DB 3FH,06H,5BH,4FH,66H,6DH,7DH;���������
DB 07H,7FH,6FH,77H,7CH,39H,5EH
DB 79H,71H,76H,73H,3EH,00H
END
������ͨ��ϵͳ��ʵ������ͼ
�ڶ�ƪ�����������ʵ�鱨��

���������ϵͳʵ�鱨��
�� ���� �ű�
ѧ �ţ� 0953505008
ָ����ʦ�� ��־��
רҵ������ 09�Զ���
����Ժϵ�� ����ѧԺ
�������ڣ� 2012��12��8��
ʵ��һ D/A��ģת��ʵ��
һ��ʵ��Ŀ��
1��������ģת���Ļ���ԭ����
2����Ϥ12λD/Aת���ķ�����
����ʵ������
1��EL-AT-II�ͼ��������ϵͳʵ����һ̨
2��PC�����һ̨
����ʵ��Ԥϰ
<1>����ģת����ԭ����
?��D/Aת�����ǽ�����Ķ�����������ת����ģ�������Ե�ѹ���������ʽ�����
?��D/Aת����ʵ������һ��������������������һ�㳣�õ�����D/Aת�����������ģ���ѹuo������������Dn֮������ȹ�ϵ��UREFΪ�ο���ѹ��
����uo��DnUREF
?���������ÿһλ�����ƴ��밴��Ȩֵ��Сת������Ӧ��ģ������Ȼ������λ��ģ������ӣ������õ���ģ�������������������ȣ�������ʵ���˴���������ģ������ת����
<2>����ģת����ת��������
��ģת�������ж��֣�����һ���Ƕ���������ݽ��в����˲����������˲�����������벹���˲�ǰ����������ͬ�������˲��������źţ��Ը�����źŽ����ڲ��˲��������������������Уģ�l���ᣭ�ӣ�������ƣ���������ص����������Ե����ص����������а������˲������ģ���źţ���ģ���źŽ���ģ���ͨ�˲����������ģ���źš�
��һ�ַ����ǣ�������������ģ���ź��ṩװ�ã�����ͬ��ʱ��ν����������IJ������ݱ��ģ������Ȼ����ݶ����������㷽�̣���ģ�������·�������㣬�������һ�ζ������������Ʊ�ʾԭ�����źŵ���Ӧ�β��Σ������ؽ�������ת�����Ϳɻ�ԭ����������ģ���źš�
�ġ�ʵ��������
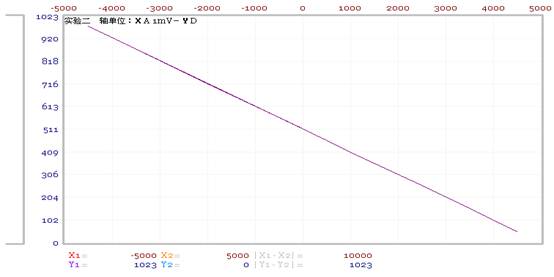
1��ʵ�����ݽ����¼���±���

���ݴ��������ݹ�ʽ��ģ����Uo=Vref - 2Vref(29K10+...+20K0)/210 ��Vref=5.0v�������������ֵ�����ϱ���
2����������ģ������Ӧ����
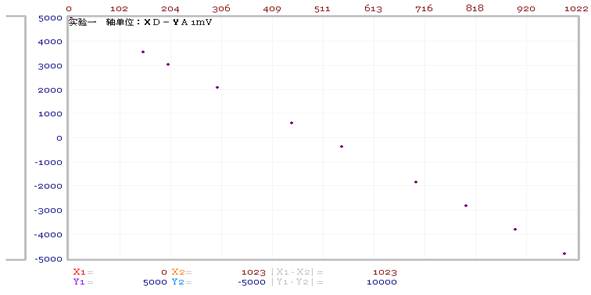
�塢ʵ�����
��ʵ��ó����ݿ��Կ�������ֵ��ʵ��ֵ������������ԭ����Ҫ�У��������������������ʵ�����·��������������ѹ�����������ţ�ת����
ʵ��� A/Dģ��ת��ʵ��
һ��ʵ��Ŀ��
1������ģ��ת���Ļ���ԭ����
2����Ϥ10λA/Dת���ķ�����
����ʵ������
1��EL-AT-II���������ϵͳʵ����һ̨��
2��PC�����һ̨��
����ʵ��Ԥϰ
<1>����ģת����ԭ����
?��A/Dת���ǽ�ģ���ź�ת��Ϊ�����źţ�ת������ͨ��ȡ�������֡������ͱ����ĸ�������ɡ�
?��ģ��ת��(ADC)���ģ��һ����ת��������/ģ(D/A)ת���෴���ǽ�������ģ����������Ԫ�Ļҽס���ѹ�������ȣ�ͨ��ȡ��ת������ɢ����������
<2>��ģ��ת��������
A/Dת������ֱ��ת�����ͼ��ת���������ࡣ ��
ֱ�ӷ���ͨ��һ����ѹ��ȡ�����ֵ�ѹ���бȽϣ��Ӷ�ֱ�ӽ�ģ����ת���������������ص��ǹ����ٶȸߣ�ת���������ױ�֤����Ҳ�ȽϷ��㡣ֱ��A/Dת�����м����͡���αȽ��͡����бȽ��͵ȡ�
��ӷ��ǽ�ȡ�����ģ���ź���ת�����м����ʱ��t��Ƶ��f, Ȼ���ٽ�t��fת���������������ص��ǹ����ٶȽϵͣ���ת�����ȿ������ýϸߣ��ҿ�������ǿ�����A/Dת�����е��λ����͡�˫�����͵ȡ�
�ġ�ʵ��������
1��ʵ�����ݽ����¼���±���
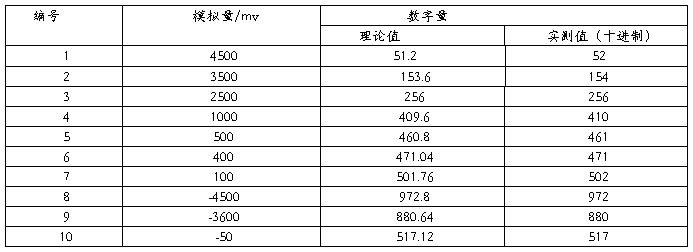
���ݴ��������ݹ�ʽ��������=��Vref��ģ������/2Vref×210�������������ֵ�����ϱ���Vref=5.0v��
2����������ģ������Ӧ����
�塢ʵ�����
��ʵ��ó����ݿ��Կ�������ֵ��ʵ��ֵ������������ԭ����Ҫ�У��������������ʵ�����·��������������ѹ�����������ţ�ת����
ʵ���� ����PID����
һ��ʵ��Ŀ��
1���о�PID�������IJ�����ϵͳ�ȶ��Լ����ɹ��̵�Ӱ�졣
2���о���������T��ϵͳ���Ե�Ӱ�졣
3���о�I��ϵͳ��ϵͳ���ȶ���
����ʵ������
1��EL-AT-II�ͼ��������ϵͳʵ����һ̨��
2��PC�����һ̨��
����ʵ��Ԥϰ
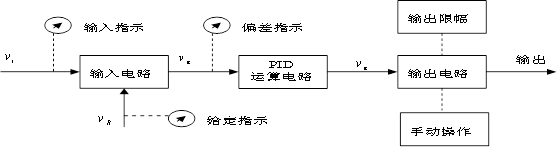 <1>��PID������ϵͳ����ɣ�
<1>��PID������ϵͳ����ɣ�
<2>��PID�������IJ�����ϵͳ�ȶ��Ե�Ӱ�죺
1������ϵ��Kp��ϵͳ�ȶ����ܵ�Ӱ��
��ϵͳ����̬����Ӱ�죺��ϵͳ�ȶ���ǰ���£��Ӵ�Kp���Լ�����̬��������������̬��Kp��������Ҫ����ϵͳ�Ķ�̬���ܡ�
2������ʱ��TI��ϵͳ���ܵ�Ӱ��
��ϵͳ����̬����Ӱ�죺���ֿ�������������ϵͳ��̬�����ϵͳ�Ŀ��ƾ��ȣ�����TI̫��������̫�������ܼ�����
3����ʱ��TD��ϵͳ���ܵ�Ӱ��
��ϵͳ����̬����Ӱ�죺�ֻ��ڵļ��룬�����������ֻ�仯˲�䣬��ƫ��仯��������п��ơ�������һ�����ڵ��������ã�����������ϵͳ���ȶ��ԡ�
�ġ�ʵ��������
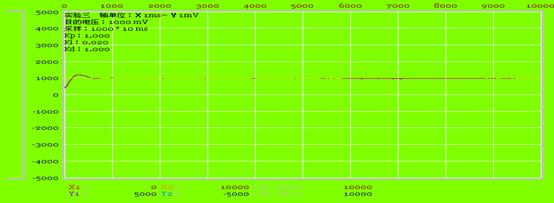
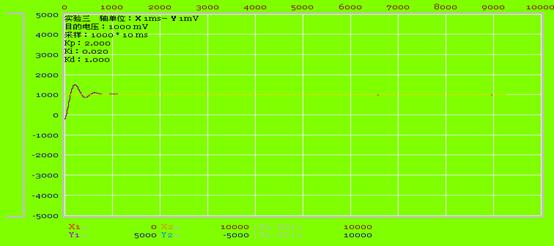
1��ʵ���������Ծ��Ӧ����
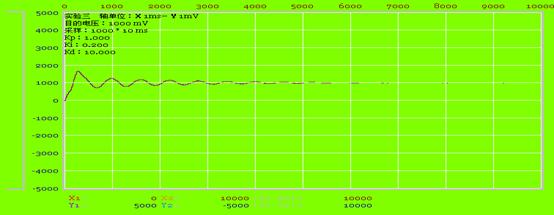
?��KP=1.000 Ki=0.020 Kd=1.000 ��%=(Cmax-C��)/C��=20% Ts=500ms
?��KP=2.000 Ki=0.020 Kd=1.000 ��%=(Cmax-C��)/C��=50% Ts=600ms
?��KP=1.000 Ki=0.020 Kd=10.000 ��%=(Cmax-C��)/C��=60% Ts=4000ms
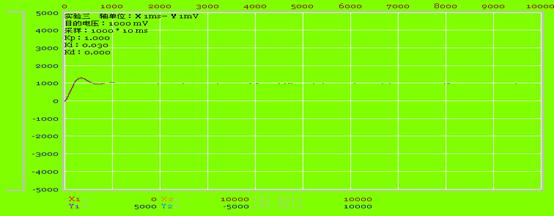
�ܡ�KP=1.000 Ki=0.030 Kd=0.000 ��%=(Cmax-C��)/C��=20% Ts=600ms
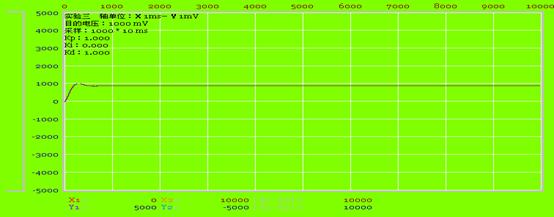
�ݡ�KP=1.000 Ki=0.000 Kd=1.000 ��%=(Cmax-C��)/C��=0% Ts=200ms
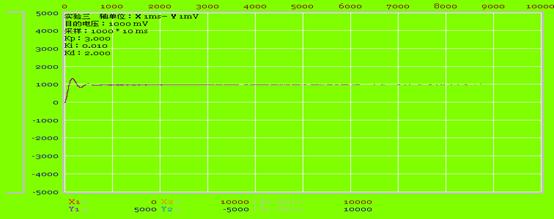
�ޡ�KP=3.000 Ki=0.010 Kd=2.000 ��%=(Cmax-C��)/C��=30% Ts=400ms
2��ʵ�����ܽ�
��1����֤��ʵ��Ԥϰ��
��2��PID�����������������ȶ�����Ӱ�죬���ҶԶ�̬����Ҳ��Ӱ�졣�ܽ����£�
Kp��ϵͳ�Ķ�̬����Ӱ�죺Kp�Ӵ�ʹϵͳ��Ӧ�ٶȼӿ죬Kpƫ��ʱ��ϵͳ�������࣬����ʱ��ӳ�����Kp̫С�ֻ�ʹϵͳ����Ӧ�ٶȻ�����Kp��ѡ���������Ӧ����4:1˥������Ϊ�ˡ�
Ti��ϵͳ�Ķ�̬����Ӱ�죺���ֿ���ͨ��Ӱ��ϵͳ���ȶ��ԡ�TI̫С��ϵͳ���ܲ��ȶ����������϶ࣻTI̫��ϵͳ��Ӱ�콫��������TI���ʺ�ʱ��ϵͳ�Ĺ��ɹ������ԱȽ����롣
TD��ϵͳ�Ķ�̬����Ӱ�죺��ʱ��TD�����Ӽ������õ����ӿ��Ը���ϵͳ�Ķ�̬���ԣ�����ٳ����������̵���ʱ��ȡ��ʵ��Ӵ�������ƣ����Լ�����̬����߿��ƾ��ȡ���TDֵƫ���ƫС�����ʵ��䷴��
�塢��ʵ�������ܽ�
PID�������IJ���������ݹ�������ľ���Ҫ�������ǡ��ڹ�ҵ���̿����У�ͨ��Ҫ��֤�ջ�ϵͳ�ȶ����Ը������ı仯��Ѹ�ٸ��٣�������С���ڲ�ͬ���������Ӧ�ܱ����ڸ���ֵ�����������������ܵ�С����ϵͳ�ͻ������������仯ʱ����Ӧ�����ȶ���һ����˵��Ҫͬʱ������ЩҪ���Ǻ��������ģ��������ϵͳ�ľ��������������Ҫ������ָ�꣬ͬʱ������������Ҫ��
ʵ���� ¯�¿���ʵ��
һ��ʵ��Ŀ��
1���˽��¶ȿ���ϵͳ���ص㡣
2���о���������T��ϵͳ���Ե�Ӱ�졣
3���о���ʱ�䳣��ϵͳPID�������IJ���������������
����ʵ������
1��EL-AT-II�ͼ��������ϵͳʵ����һ̨
2��PC�����һ̨
3��¯�¿���ʵ�����һ̨
����ʵ��������ƹ���
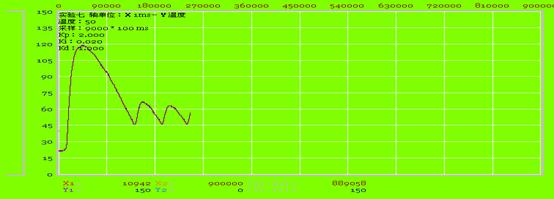
?��Kp=2.000 Ki=0.020 Kd=1.000
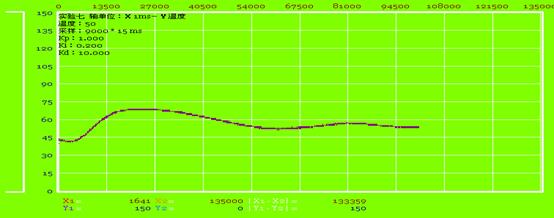
?��Kp=2.000 Ki=0.200 Kd=10.000

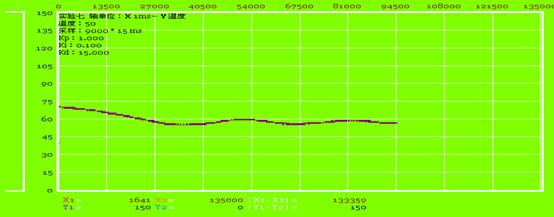
?��Kp=1.000 Ki=0.200 Kd=10.000
�ܡ�Kp=1.000 Ki=0.100 Kd=15.000
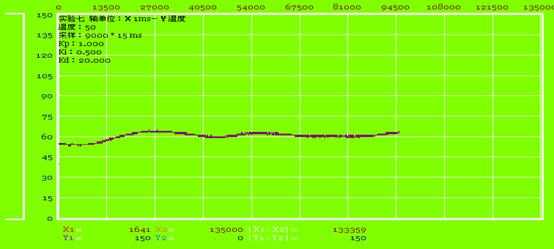
�ݡ�Kp=1.000 Ki=0.500 Kd=20.000
�ޡ�Kp=1.000 Ki=0.800 Kd=15.000
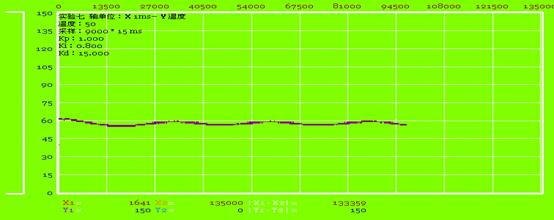
ʵ���������ݴ���
1��ͨ����ε���Kp��Ki��Kd���յõ����ɹ��̽�Ϊ�����ҿ���Ч���ϺõĿ��Ʋ�����Kp=1.000 Ki=0.800 Kd=15.000
��Ӧ�������£�

2��ʵ��������
��%=(Cmax-C��)/C��=20% Tr=14s ��̬��10%
�ܽ���ڵ����¯�����±����ǿ�����˿���ȣ��������ǿ�������Ȼ��ȴ�����Ե��¶�һ�����������ÿ����ֶ���ʹ�併�¡���������¯���ƶ�����з����ԣ�ʱ���Լ���ȷ���ԡ���Ե����¯�д���ԡ����ͺ���ʱ��ķ����Զ���Ŀ��Ƶ��ص㣬��ͳ PID �����㷨���ڹ��ɹ���ʱ���볬����֮���ì�ܣ������������� PID �� 3 ��������Ҳ���������Ҫ������С����ɹ���ʱ�����������Ҫ����ɹ��̿죬���Ȼ���ֽϴ�ij���������������ȫ��
�ġ����һ����Ч��Kp��Ki��Kd��ѡ��
ʵ���Ϲ��ɵ����¯�¶ȿ��Ƽ�����ģ��PID������PID�����ſ��ơ�����Ӧ���ƣ��ٷ�չ�����ܿ��ƣ�ÿһ����ʹ���Ƶ����ܵõ��˸��ơ���Ŀǰ�ĵ����¯���Ʒ����У�PID ���ƺ�ģ������Ӧ����࣬�������Ƕ����������Կ˷���ȱ�㡣���ǿ��Խ����߽���������һ�� PID ����������ģ�����ƣ����Դﵽ���ƾ��ȸߡ�³���Ժá���Ӧ����ǿ���ṹ������ʵ�ֵ�Ч������ʵ����·ͼ��������£�
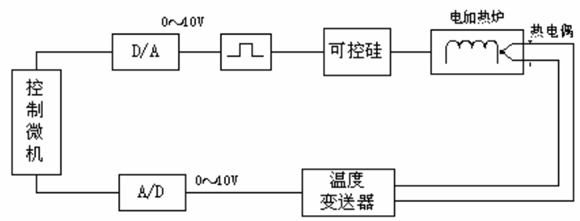
�����¯ʵ����·ͼ