实验报告
姓名:王琳 学号:12030078
一、控制对象描述
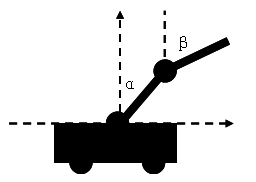
本实验的控制对象是二级倒立摆系统,它主要由机电装置和控制装置两部分组成,机电装置的结构主要由小车、两根摆杆及连接轴构成。假设系统中的每一根摆杆都是匀质刚体,忽略实验中的摩擦力,驱动力与放大器的输入成正比且无延迟地直接作用于小车上。设定摆杆竖直向上时,下摆杆角位移、上摆杆角位移均为零,摆杆顺时针旋转为正。下图为二级倒立摆模型。
二、系统建模
设x为小车位移,F为加在小车上的力,m为小车质量,下摆杆质量为M1,转动惯量为J1,下摆杆重心到转轴间的长度为l1,上摆杆质量为M2,转动惯量为J1,上摆杆重心到转轴b间的长度l2,小车与地面摩擦力系数f,下摆杆转轴a与b间的长度L,重力加速度g。运用牛顿力学定律建立方程:



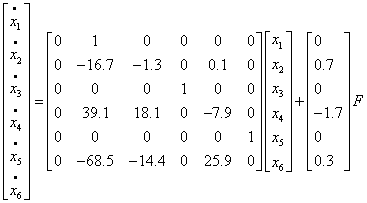
经过线性化得到如下式子:



参数取值:
g=9.8;m=1.328;M1=0.22;M2=0.187;l1=0.303;l2=0.226
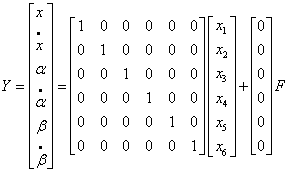
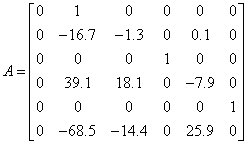
可以得到A、B、C、D:

三、系统分析与控制器设计
采用线性二次型最优控制器(linear quadratic regulator—LQR)对系统进行控制。LQR是一种以性能指标为状态变量和控制变量的动态系统最优控制方法,在现代控制理论中占有非常重要的位置。其目标就是寻找一个容许控制函数U(t)使性能指标函数J取为最小值。设控制输入函数形式为:
状态反馈矩阵:
其中
性能指标函数:
四、系统仿真
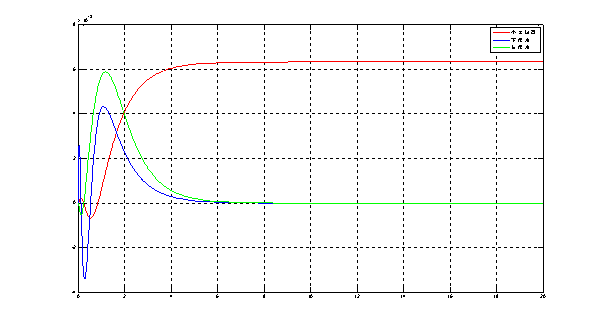
在二级倒立摆系统中,小车的位移和上下摆角为只要被控量,在考虑加权矩阵时分别选取1000,10,10,R是对输入量U的加权值,取1。
红色线为小车位置,蓝色线为下摆角,绿色线为上摆角
五、实验总结
倒立摆系统是一个典型的非线性、 强耦合、 多变量的不稳定系统。 在控制研究领域有着代表性的意义。 倒立摆作为控制系统的被控对象, 许多抽象的控制概念如稳定性、可观性、可控性都可以通过它直观的表现出来。
本实验以二级倒立摆为研究对象,利用二次型最优控制器LQR求出最优状态反馈矩阵K,经过对Q和R两个加权矩阵的选取实现二级倒立摆的自动控制,效果较好。
第二篇:倒立摆实验报告1
专业实验报告
