倒立摆的滑模控制
摘要:倒立摆系统的控制问题一直是控制研究中的典型问题,由于控制系统是非线性的,不能运用传统线性理论的方法来对其进行控制,本文运用了两种方式设计了滑模控制器对台式倒立摆进行控制,并进行了仿真实验,结果显示运用此方法的倒立摆系统具有更好的稳定性以及抗干扰能力。
1引言
滑模控制(sliding mode control, SMC)也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。
变结构控制是前苏联学者 Emeleyanov、UtItkin 在 20 世纪 50 年代初提出的一种控制概念。滑模变结构式变结构控制的一种控制策略。这种策略与常规控制的根本不同在于控制的不连续性,即一种使系统“结构”随着时间的变化的开关特性。该控制特性可以迫使系统在一定特性下沿着规定的轨迹状态做小幅度高频率的上下浮动,即所谓的“滑模”状态。滑模控制的优点是能够克服系统的不确定性, 对干扰和未建模动态具有很强的鲁棒性,尤其是对非线性系统的控制具有良好的控制效果。近年来 ,滑模变结构方法因其所具有的优良特性而受到越来越多的重视.该方法通过自行设计所需的滑模面和等效控制律 ,能快速响应输入的变换 ,而对参数变换和扰动不敏感 ,具有很好的鲁棒性 ,且物理制作简单.但大多数采用滑模变结构方法的控制系统没采用联合滑模观测和滑模控制的思想进行鲁棒方案的设计。滑模变结构控制逐渐引起了学者们的重视,其最大优点是滑动模态对加在系统上的干扰和系统的摄动具有完全的自适应性,而且系统状态一旦进入滑模运动,便快速地收敛到控制目标,为时滞系统、不确定性系统的鲁棒性设计提供了一种有效途径,但其最大的问题是系统控制器的输出具有抖动
本文运用常值切换控制以及比例切换控制两种方式设计滑膜控制器对一级台车式倒立摆模型进行分析和建立数学模型,对小车的位置控制问题、摆角度控制问题和控制器的输出进行分析。在Matlab仿真环境下进行仿真实验。
2 台车式倒立摆模型
倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对倒立摆系统的研究能有效的反映控制中的许多典型问题:如非线性问题、鲁棒性问题、镇定问题、随动问题以及跟踪问题等倒立摆的控制问题就是使摆杆尽快地达到一个平衡位置,并且使之没有大的振荡和过大的角度和速度。当摆杆到达期望的位置后,系统能克服随机扰动而保持稳定的位置。。图1为一级倒立摆的示意图,小车质量为M,小车位置为x,摆的质量为m,摆的角度为 ,杆长为2。
,杆长为2。
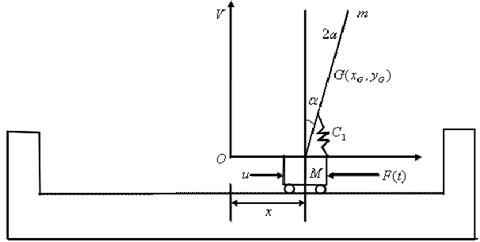
图1倒立摆系统示意图
倒立摆的状态方程为:
 (1)
(1)
其中










其中 为弹性硬度,
为弹性硬度, ,
, 和
和 分别为控制输入和干扰力,且
分别为控制输入和干扰力,且 ,
, 为常数。
为常数。
3滑模控制器设计
设计滑膜控制器的基本步骤主要包括两个相对独立的部分;
1.设计切换函数s(x),使它所确定的滑动模态渐进稳定且具有良好的动态品质,
2.设计滑模动态控制率u=(x),使得条件得到满足,从而在切换面上形成滑动模态区。
可以采用两种变结构控制方法实现对台式倒立摆小车和摆角的控制。在该控制律中,采用Ackermann公式设计滑模控制律中的C值:
 ,
,  (2)
(2)
Ackermann公式描述为:
 (3)
(3)
 (4)
(4)
(1) 常值切换控制
控制律取
 (5)
(5)
其中 。
。
(2) 比例切换控制
比例切换控制律的输出包括 函数的一个乘积。由于因子
函数的一个乘积。由于因子 的作用,其输出变为[-,+]区间上的连续函数,而不再是离散的,这样的连续控制的输出可以削弱滑膜控制器调节时候发生的抖振。
的作用,其输出变为[-,+]区间上的连续函数,而不再是离散的,这样的连续控制的输出可以削弱滑膜控制器调节时候发生的抖振。
控制律取
 (6)
(6)
4 仿真实例
倒立摆的参数为取: (重力加速度),
(重力加速度), (小车质量),
(小车质量), (杆的质量),
(杆的质量), (杆的半长),
(杆的半长), ,
, .
.
作图采样时间为 ,仿真时间为30.初始条件取
,仿真时间为30.初始条件取 ,
, ,
, ,
, .期望状态为:
.期望状态为: ,
, ,
,  ,
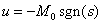
, .其中摆动角度单位为弧度。仿真程序取F=1,控制律采用式(5),其中
.其中摆动角度单位为弧度。仿真程序取F=1,控制律采用式(5),其中 ,仿真结果如图2,3所示;取F=2,控制律采用式(6),其中
,仿真结果如图2,3所示;取F=2,控制律采用式(6),其中 。
。
在控制系统中,由于n=4, 故取λ1 =-1, λ2 =-2, λ3 =-3, 根据Ackermann公式设计滑模控制律中C值,即根据式(2),可得 。
。
5 仿真研究
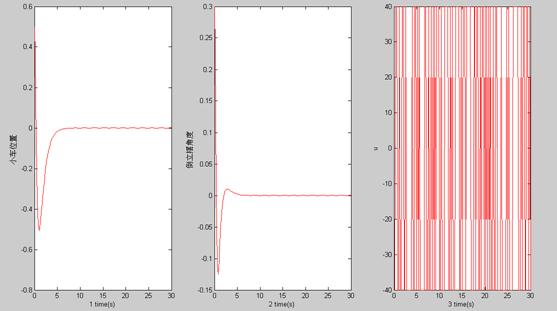
图2 常值切换控制
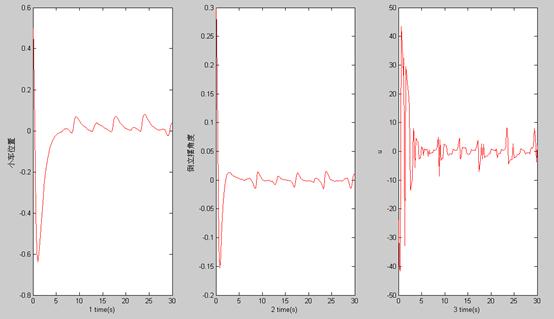
图3 比例切换控制
从仿真结果可以看出,常值切换控制所设计的滑模控制器相比于比例切换控制在位置控制与角度控制的过程之中具有较高的稳定性,但是控制器的输出值方面不如比例切换控制器稳定,比例控制器对于消除滑膜变结构控制所固有的高频颤动现象有抑制作用,对模型不确定性外部干扰具有较强的鲁棒性,同时保证了系统在整个状态空间内具有较好的运动品质,使系统快速到达滑模面。
本文用两种方法设计的滑模控制器应到台车式倒立摆中,从仿真结果可以得出:比例切换控制设计的滑模控制器不仅缩短了过渡时间,减少了常规滑模变结构控制所固有的高频颤动现象,而且改善了系统的控制性能,提高了系统的鲁棒性。
6 结论
本文针对倒立摆系统的控制需求,运用了两种方式设计滑膜控制器,并运用matlab对两种算法进行仿真,从仿真结果可以看出,相比于常规的常值切换控制器所设计的滑模控制器,比例切换控制设计的滑模不仅缩短了控制所需的时间,而且部分消除了常规滑模变结构控制所固有的高频颤动现象,而且改善了控制系统的性能,提高了鲁棒性。
7 参考文献
[1] 张昌凡, 王耀南. 滑模变结构的智能控制及其应用[J]. 中国电机工程学报, 2001, 21(3): 27-29.
[2] 穆效江, 陈阳舟. 滑模变结构控制理论研究综述 [J][J]. 控制工程, 2007, 1 14(1): 1-5.
[3] 刘金琨. 滑模变结构控制 MATLAB 仿真[M]. 清华大学出版社, 2005.
[4] 邹伟全, 姚锡凡. 滑模变结构控制的抖振问题研究[J]. 组合机床与自动化加工技术, 2006, 1: 53-55.
[5] 张晓宇, 苏宏业. 滑模变结构控制理论进展综述[J]. 化工自动化及仪表, 2006, 33(2): 1-8.
[6] 张昌凡. 滑模变结构控制研究综述[J]. 株洲工学院学报, 2004, 18(2): 1-5.
[7] 姚胜兴, 彭楚武. 基于比例切换变结构控制的倒立摆系统研究[J]. 武汉理工大学学报, 2007, 29(4): 114-117.
附录:程序如下所示:
第二篇:倒立摆
简易旋转倒立摆及控制装置
摘要
倒立摆是理想的自动控制理论研究实验平台,许多抽象的控制概念如系统稳定性、可控性、抗干扰能力等,都可以通过倒立摆直观地表现出来。因此,对倒立摆的控制研究不仅具有理论意义而且具有实际意义。本装置就以简易旋转倒立摆为研究对象,建立了简易旋转倒立摆的物理模型。
Abstract:Inverted pendulum is an ideal experimental platform of automatic control theory research, many abstract concepts such as the control of system stability, controllable, anti-interference ability, etc., can be displayed visually through the inverted pendulum. Therefore, research on the control of the inverted pendulum not only has theoretical significance and practical significance. This device is simple and rotational inverted pendulum as the research object, established the simple physical model of rotational inverted pendulum.
一. 系统方案
1.系统结构
简易旋转倒立摆包括摆杆,电机、传动部件、支架及其控制系统,摆杆通过传动部件与电机轴相连;传动部件为一刚性旋臂,其一端与电机轴固接、另一端与摆杆铰接,电机轴为水平方向,旋臂和摆杆的回转面均为竖直方向。该装置主要由转轴电机、旋转臂及摆杆三部分构成,
2.方案比较与选择
1.测量角度的传感器选择
(1)加速度传感器
(2)角速度传感器
(3)光电编码器
(4)本装置使用的传感器——MPU6050角速度传感器
2.单片机的选择
(1)AT单片机
AT系列51单片机是USA的产品,品种单一,功能少,运行速度慢,RAM/ROM小,性能还不够稳定;而且AT系列单片机一般用下载器进行烧写程序,理论上可以直接用单片机的几根I/O口接并口线,但如果电路板没做好,可能会连带把计算机并口烧坏, 因此AT系列单片机无法完成我们设计的要求。
(2)STC系列12C5A60S2
STC系列单片机功能多,运行速度高,RAM/ROM大,性能稳定,低功耗,可以有效的抵抗静电和干扰,并且使用串口进行烧写程序,用单片机的P3.0和P3.1两个口接MAX232芯片即可。故应用STC系列12C5A60S2这个电路设计相对比较简单,

3.驱动电路的选择
(1)全桥电路驱动
(2)半桥电路驱动
(3)本装置使用的驱动电路——步进电机驱动
4.电机的选择
方案一:选用直流电机
直流电动机是一种旋转式电动机器,它将电能转变为机械能,只要加上合适的电压就会旋转,而且转得圈数和角度难以精确控制,无法记录转子旋转的脉冲数以及转轴所转的角度,以致无法控制轻杆所转的角度,进而无法实现要求。用直流电机,若要完成要求需要加一个编码器进行计数,那样将导致设计理念复杂化。
方案二:伺服电机
方案三:选用步进电机
步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,按照节拍工作,可以旋转极小的角度并按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行,故适合本设计中单片机的控制。而步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由脉冲信号频率决定,可以比较精确的控制电机的运行状态,并容易获得每一步走的距离,并可以计算时间,速度以及加速度。所以,本设计选用方案二更易于实现。
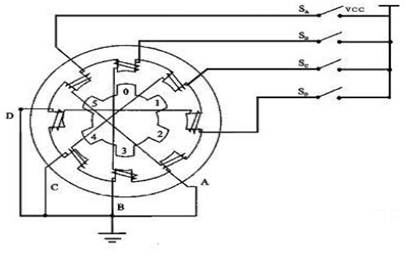
图1 四相步进电机步进示意图
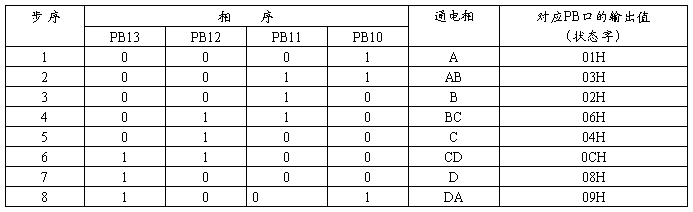
步进电机四相八拍相序表
用51单片机驱动步进电机的方法。
驱动电压12V,步进角为3.6度。一圈360度,需要100个脉冲完成。
2.角度传感器
方案一:选用角度传感器
利用角度变化来定位物体,但其集成度不高,体积大,数据转换效率低,无法满足设计功能的实现。
方案二:选用MPU-6050三轴陀螺仪
MPU-6050三轴陀螺仪整合了3轴陀螺仪、3轴加速器,它非常准确,每个通道都有16位的ADC,因此它能够同时捕获X\Y\Z信道。其为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时之轴间差的问题,减少了大量的包装空间。其含可藉由第二个I2C端口连接其他厂牌之加速器、磁力传感器、或其他传感器的数位运动处理(DMP: Digital Motion Processor)硬件加速引擎,由主要I2C端口以单一数据流的形式,向应用端输出完整的9轴融合演算技术。所以,经过论证比较选用MPU-6050更易于实现设计功能。
二、理论分析与计算
单摆能够稳定在垂直位置的条件有两个:
(1) 受到与位移(角度)相反的恢复力;
(2) 受到与运动速度(角速度)相反的阻尼力。
如果没有阻尼力,单摆会在垂直位置左右摆动。阻尼力会使得单摆最终停止在垂直位置。阻尼力过小(欠阻尼)会使得单摆在平衡位置附近来回震荡。阻尼力过大(过阻尼)会使得单摆到达平衡位置时间加长。因而存在一个临界阻尼系数,使得单摆稳定在平衡位置的时间最短。
控制倒立摆底部电机的转速,使得它作加速运动。这样分析倒立摆受力,它就会受到额外的惯性力,该力与圆盘旋转的加速度方向相反,大小成正比。这样倒立摆所受到的回复力为:
F= mg sinθ- ma cosθ≈ mg - mk1θ (2-1)
式中,由于θ很小,所以进行了线性化。假设负反馈控制是转轴的加速度a与偏角θ成正比,比例为k1。如果比例 k1 > g,(g 是重力加速度)那么回复力的方向便于位移方向相反了。
此外,为了使得倒立摆能够尽快地在垂直位置稳定下来,还需要增加阻尼力。虽然存在着空气和摩擦力等阻尼力,相对阻尼力比较小。因此需要另外增加控制阻尼力。增加的阻尼力与偏角的速度成正比,方向相反。因此式(2-1)可变为
F = mgθ-mk1θ? mk2θ' (2-2)
按照上面的控制方法,可把倒立摆模型变为单摆模型,能够稳定在垂直位置。因此,可得控制转轴的加速度的控制算法
a = k1θ+ k2 θ' (2-3)
式中,θ 为转杆的倾角;θ' 为角速度;k1、k2 均为比例系数;两项相加后作为转轴加速度的控制量。只要保证在k1 > g ,k2> 0条件下,可以使得转杆像单摆一样维持在直立状态。
其中有两个控制参数 k1、 k2, k1, 决定了摆杆是否能够稳定到垂直平衡位置,它必须大于重力加速度; 决定了摆杆回到垂直位置的阻尼系数,选取合适的阻尼系数可以保证摆杆尽快稳定在垂直位置。

三.电路与程序设计

四、硬件说明
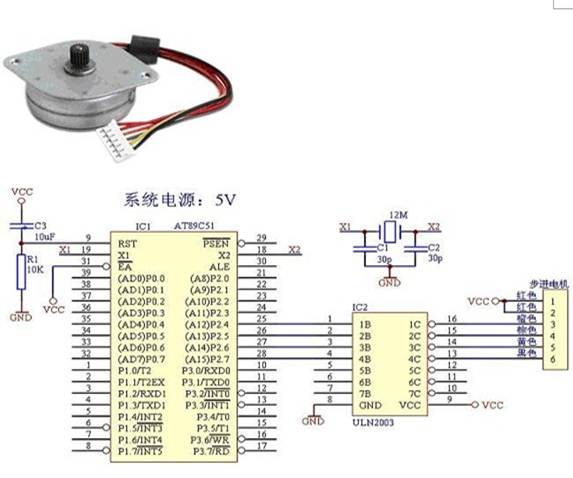
一.步进电机的工作原理
该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。图1是该四相反应式步进电机工作原理示意图
2.
2. MPU6050陀螺仪传感器工作原理
MPU6050整合3轴陀螺仪和3轴加速度,它非常准确,每个通道都有16位的ADC,因此它能够同时捕获X\Y\Z信道。现今MPU6050被广泛应用于移动设备、穿戴式设备、机器人姿态识别等领域。

3.单片机系统
信号处理系统以STC12C5A60S2单片机为核心。STC12C5A60S2是具有高速、低功耗、超强抗静电和抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。单片机系统完成脉搏信号的A/D转换、参数计算、存储及显示控制等功能。如图3-1所示。
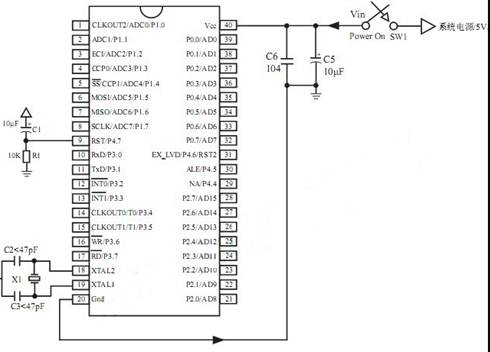
图3-1 STC12C5A60S2最小系统原理图
五、总结