摘要
这次设计是进行简单的开普勒望远镜系统的光学设计,所谓光学系统设计就是设计出系统的性能参数、外形尺寸、和各光组的结构等,完成一个光学设计可分为两步走,第一步,外形尺寸设计,第二步,像差设计,及像差的校正,第一步非常重要,只有各透镜的尺寸合理组合,系统的像差才会小,也才有可调的必要,由于光学系统大多是有多个透镜构成的,这时追迹光线可以求得光学系统各种类型的像差,但是这是由于透镜数目很多,计算量大,容易出错。为了降低错误率,本次设计采用Matlab来计算光线追迹的过程,程序分别编写了近轴光线和轴外光线的追迹。并编写了像差校正的程序,在一定程度上有效的降低了色差、正弦差和球差。另外本次设计还学习了Zemax光学设计软件,在设计中我把Matlab计算得到的系统尺寸用Zemax来模拟了,不仅学习了Zemax也对Matlab进行了验证。
关键词:开普勒望远镜 像差 Matlab Zemax 光学设计
一、课程设计题目分析
本次课程设计为简单开普勒望远镜系统的光学设计,简单的望远镜有物镜和目镜组成,具有正的目镜的望远镜称为开普勒望远镜。开普勒望远镜的像方焦点与目镜的物方焦点重合,光学间隔 =0,因此平行光入射的光线经望远镜系统后仍以平行光射出,这种望远镜一般物镜框就是孔径光阑,也是入瞳,出射光瞳位于目镜像方焦点之外很靠近焦点的地方,使用时,眼睛与出瞳重合。
=0,因此平行光入射的光线经望远镜系统后仍以平行光射出,这种望远镜一般物镜框就是孔径光阑,也是入瞳,出射光瞳位于目镜像方焦点之外很靠近焦点的地方,使用时,眼睛与出瞳重合。
二、课程设计要求
做一个简单开普勒望远镜的光学系统外形尺寸设计,并单独对其物镜进行初始结构选型及像差校正设计,具体要求如下:
1、视放大率:
2、分辨率:
3、视场角:2 =
=
4、筒长:L=130mm
三、使用Matlab对系统外形尺寸计算和像差分析
3-1、根据要求计算物镜和目镜的焦距(单位:mm)
根据开普勒望远镜的组成原理可得出以下方程:



所以:物镜的焦距为 ,目镜的焦距为
,目镜的焦距为
3-2、计算物镜的通光孔径,并根据表3加以确定

参考表
物镜框即为孔径光阑和入射光瞳,其大小与系统的分辨率本领有关,人眼的极限分辨角是 ,为了使望远镜系统所能分辨的细节也能被人眼分开,及达到用望远镜观察望远系统的目的,那么,望远镜的市场角放大率与它的分辨角
,为了使望远镜系统所能分辨的细节也能被人眼分开,及达到用望远镜观察望远系统的目的,那么,望远镜的市场角放大率与它的分辨角 之间满足:
之间满足:
 (1)
(1)
其中= ,式中D为为望远镜的入瞳(单位:mm)
,式中D为为望远镜的入瞳(单位:mm)
于是可得: (2)
(2)
称为望远镜的正常放大率,望远镜的 不应低于此时所决定的值,考虑到眼睛的分辨率,望远镜的放大率与物镜通光口径之间可以取以下关系:
不应低于此时所决定的值,考虑到眼睛的分辨率,望远镜的放大率与物镜通光口径之间可以取以下关系:



 =12~24,
=12~24,
综上所述,故可取D=18。
3-3、计算出瞳直径(单位:mm)
由于 (3)
(3)
可得:  。
。
所以出瞳直径 =1.50mm。
=1.50mm。
由公式 可知,当D一定时,越大,越小。因此增大时,望远镜像面的照度就要降低,若要求保持具有一定大小,当增大时就一定要增大物镜的口径。
可知,当D一定时,越大,越小。因此增大时,望远镜像面的照度就要降低,若要求保持具有一定大小,当增大时就一定要增大物镜的口径。
3-4、计算目镜视场角
由公式 可知:
可知:

可解得: ,于是。
,于是。
3-5、计算出瞳距
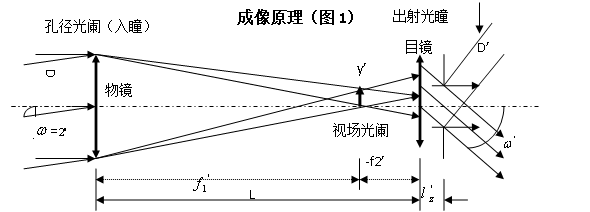
由图1几何关系(孔澜与出瞳的共轭关系)可知:
 (4)
(4)
则: =-130×10/(-130+10)=10.8mm
=-130×10/(-130+10)=10.8mm
3-6、计算目镜的通光孔径
由图1的几何关系可得:
 mm
mm
3-7、计算目镜的视度调节距离
一般望远镜要求视度调节量为5折光度,由牛顿公式可以求出目镜相对于分划板的移动量为:
 mm
mm
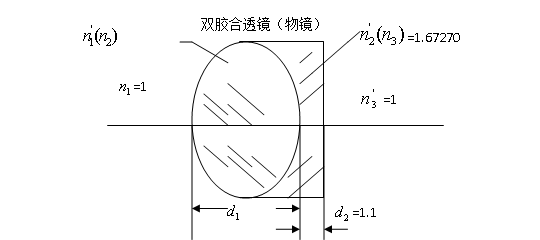
3-8、确定玻璃对选择
整体结构我们选用开普勒望远镜系统,然后由上面的计算可以求出物镜的相对孔径为 ,
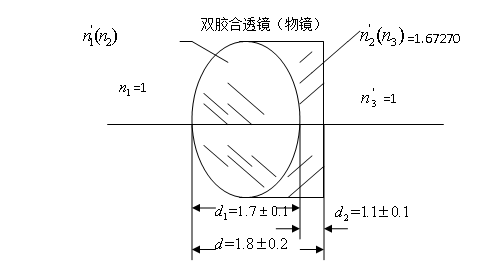
, =120,故物镜选择双胶合物镜;目镜根据视场角和相对出瞳距,可选用凯涅尔目镜。望远镜易取冕牌玻璃透镜在前,火石玻璃在后的形式。这次设计我们选用K9+ZF2玻璃对。
=120,故物镜选择双胶合物镜;目镜根据视场角和相对出瞳距,可选用凯涅尔目镜。望远镜易取冕牌玻璃透镜在前,火石玻璃在后的形式。这次设计我们选用K9+ZF2玻璃对。
3-9、计算物镜的光焦度分配
设计选用K9+ZF2玻璃对。
光焦度的计算公式为:根据公式:
 (5)
(5)
用matlab程序计算如下:
需要给matlab输入数据:K9的阿贝常数V1=64;ZF2的阿贝常数V2=32.2;物镜的焦距(符号为正)f=120
程序为:
w1=V1/(fw*(V1-V2));
w2=-V2/(fw*(V1-V2));
输出为:w1=0.0168 ; w2=-0.0084
则物镜的光焦度分配为: = 0.0168 ;
= 0.0168 ; =-0.0084
=-0.0084
3-10、计算物镜的三个面的曲率及相应的曲率半径
双胶合薄透镜的球差与结构参数的关系为:
 (6)
(6)
其中 为:
为:

 式中
式中 是第一透镜像距的倒数,是第二透镜的物距的倒数,这二者相等,有
是第一透镜像距的倒数,是第二透镜的物距的倒数,这二者相等,有 =+,若双胶合镜作为望远物镜,=0,则有,==,此外,式中h和
=+,若双胶合镜作为望远物镜,=0,则有,==,此外,式中h和 在计算前已定。
在计算前已定。
曲率半径为:
 (9)
(9)
下面使用matlab计算相关数据。
给matlab输入数据:K9的折射率n1=1.51630;ZF2的折射率n2=1.67270;物镜的通光孔径D=18
计算程序:
rx1=w1;rw2=w1;
A1_p2=((n1+2)/n1)*w1*p2.^2+(((2*n1+1)/(n1-1))*w1.^2-((4*n1+4)/n1)*w1*rx1)*p2-((3*n1+1)/(n1-1))*w1.^2*rx1+((3*n1+2)/n1)*w1*rx1.^2+(n1.^2/(n1-1).^2)*w1.^3
A2_p2=((n2+2)/n2)*w2*p2.^2-(((2*n2+1)/(n2-1))*w2.^2+((4*n2+4)/n2)*w2*rw2)*p2+((3*n2+1)/(n2-1))*w2.^2*rw2+((3*n2+2)/n2)*w2*rw2.^2+(n2.^2/(n2-1).^2)*w2.^3
H=-h^2*fw^2/2;dL=(A1_p2+A2_p2)*H;
%---------------令dL=0,求根的判别式的
A=[((n1+2)/n1)*w1,((2*n1+1)/(n1-1))*w1.^2-((4*n1+4)/n1)*w1*rx1,-((3*n1+1)/(n1-1))*w1.^2*rx1+((3*n1+2)/n1)*w1*rx1.^2+(n1.^2/(n1-1).^2)*w1.^3]
B=[((n2+2)/n2)*w2,-(((2*n2+1)/(n2-1))*w2.^2+((4*n2+4)/n2)*w2*rw2),((3*n2+1)/(n2-1))*w2.^2*rw2+((3*n2+2)/n2)*w2*rw2.^2+(n2.^2/(n2-1).^2)*w2.^3]
C1=A+B;
deta=C1(2)^2-4*C1(1)*C1(3)
if(deta>0|abs(deta)<10^-4)
fprintf('可有两个消球差解,取小的值p2根')
end
%---------------求解p2的根
if (abs(deta)<10e-6)
y=-C1(2)/(2*C1(1))
p2=y
else
x=roots(C1)
for n=1:2
p2=x(n);
OSC(n)=-h^2*(((n1+1)*w1*p2/n1-(2*n1+1)*w1*rx1/n1+n1*w1^2/(n1-1))+((n2+1)*w2*p2/n2-(2*n2+1)*w2*rw2/n2-n2*w2^2/(n2-1)))/2;
end
if(abs(OSC(1))>abs(OSC(2)))
p2=x(2)
else
p2=x(1)
end
end
OSC=-h^2*(((n1+1)*w1*p2/n1-(2*n1+1)*w1*rx1/n1+n1*w1^2/(n1-1))+((n2+1)*w2*p2/n2-(2*n2+1)*w2*rw2/n2-n2*w2^2/(n2-1)))/2
if(OSC<0.0025)
fprintf('符合要求,可以消除球差和正弦差')
end
%-求p1和p3
p1=p2+w1/(n1-1);
p3=p2-w2/(n2-1);
%---------------求三个面的曲率半径
R=[p1,p2,p3]
fprintf('曲率半径:\n')
for i=1:3
r(i)=1/R(i);
fprintf('r(%d)=%f\n',i,r(i))
end
输出结果为:
deta =-9.4966e-010;可有消球差解,取小的p2根
p2 =-0.0190
OSC =1.7008e-004;符合要求,可以消除球差和正弦差
曲率为:
1/ r(1)= 0.0135; 1/ r(2)= -0.0190; 1/ r(3)= -0.0065
曲率半径:
r(1)=74.228626
r(2)=-52.598063
r(3)=-154.597857
3-11、透镜变厚
对于正透镜,应保证边缘有一定厚度 ;对于负透镜,则应保证具有一定的中心厚度d。负透镜的中心厚度可以直接确定,正透镜的中心厚度由边缘最小厚度确定。有如下关系:
;对于负透镜,则应保证具有一定的中心厚度d。负透镜的中心厚度可以直接确定,正透镜的中心厚度由边缘最小厚度确定。有如下关系:
 (10)
(10)
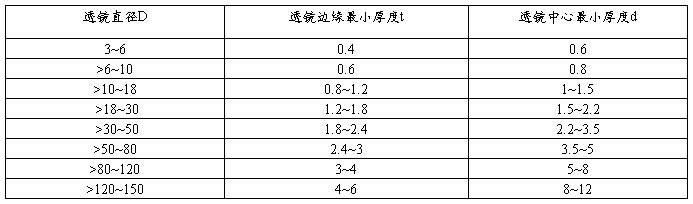
表2
本设计中,我们的D为18mm,依据表2可得,取正透镜的边缘最小厚度=1.5mm,所以中心厚度 = 1.7017mm,负透镜的中心厚度
= 1.7017mm,负透镜的中心厚度 =1.1mm。
=1.1mm。
则得物镜的初始厚度参数如下:=1.7017mm, =1.1mm。
3-12、给出物镜的初始结构参数
由上面的过程可知,若取正透镜的边缘最小厚度=1.2,所以中心厚度=1.7017,负透镜的中心厚度=1.1,则得物镜的初始结构参数如下:
 =74.228626, =1.7017,
=74.228626, =1.7017,  =1.51470,
=1.51470,  =1.52067,
=1.52067,  =1.51218
=1.51218
 = -52.598063 , =1.1, =1.67270, =1.68749, =1.66662
= -52.598063 , =1.1, =1.67270, =1.68749, =1.66662
 =-154.597857,
=-154.597857,
双胶合物镜的结构:
3-13、用光路追迹法计算球差和带光的色差,作球差曲线
我们在上面求出了物镜的三个曲率半径,我们用光路追迹的方法来求其球差和带光的色差。
下面我们使用matlab来进行光路追击。给matlab输入的数据为:
K9的F光折射率n1F=1.51630;ZF2的F光折射率n2F=1.67270;
K9的C光折射率n1C=1.51630;ZF2的C光折射率n2C=1.67270;
MATLAB 光路追迹的程序:
n0=1;hm=h;
hD=[0:0.01:h];
hCF=[0:0.01:h];
r1=r(1);
r2=r(2);
r3=r(3);
%----------D光近轴光线追击
iwD1=hD./r1;
ixD1=iwD1.*n0./n1;
uxD1=iwD1-ixD1;
lxD1=r1+r1.*ixD1./uxD1;
lwD2=lxD1-d1;
uwD2=uxD1;
iwD2=(lwD2-r2).*uwD2./r2;
ixD2=n1.*iwD2./n2;
uxD2=uwD2+iwD2-ixD2;
lxD2=r2+r2.*ixD2./uxD2;
lwD3=lxD2-d2;
uwD3=uxD2;
iwD3=(lwD3-r3).*uwD3./r3;
ixD3=n2.*iwD3./n0;
uxD3=uwD3+iwD3-ixD3;
lxD3=r3+r3.*ixD3./uxD3;
%-----D光轴外光线追击(实际)
IWD1=asin(hD./r1);
IXD1=asin(n0.*sin(IWD1)./n1)
UXD1=0+IWD1-IXD1;
LXD1=r1+(r1.*sin(IXD1)./sin(UXD1));
LWD2=LXD1-d1;
UWD2=UXD1;
IWD2=asin((LWD2-r2).*sin(UWD2)./r2);
IXD2=asin(n1.*sin(IWD2)./n2);
UXD2=UWD2+IWD2-IXD2;
LXD2=r2+(r2.*sin(IXD2))./sin(UXD2);
LWD3=LXD2-d2;
UWD3=UXD2;
IWD3=asin((LWD3-r3).*sin(UWD3)./r3);
IXD3=asin(n2.*sin(IWD3)./n0);
UXD3=UWD3+IWD3-IXD3;
LXD3=r3+(r3.*sin(IXD3))./sin(UXD3);
%---------------D光球差
qcD=LXD3-lxD3;
%-------------F光近轴光线追击
iwF1=hCF./r1;
ixF1=iwF1.*n0./n1F;
uxF1=iwF1-ixF1;
lxF1=r1+r1.*ixF1./uxF1;
lwF2=lxF1-d1;
uwF2=uxF1;
iwF2=(lwF2-r2).*uwF2./r2;
ixF2=n1F.*iwF2./n2F;
uxF2=uwF2+iwF2-ixF2;
lxF2=r2+r2.*ixF2./uxF2;
lwF3=lxF2-d2;
uwF3=uxF2;
iwF3=(lwF3-r3).*uwF3./r3;
ixF3=n2F.*iwF3./n0;
uxF3=uwF3+iwF3-ixF3;
lxF3=r3+r3.*ixF3./uxF3;
%----F光轴外光线追击(实际)
IWF1=asin(hCF./r1);
IXF1=asin(n0.*sin(IWF1)./n1F);
UXF1=0+IWF1-IXF1;
LXF1=r1+(r1.*sin(IXF1)./sin(UXF1));
LWF2=LXF1-d1;
UWF2=UXF1;
IWF2=asin((LWF2-r2).*sin(UWF2)./r2);
IXF2=asin(n1F.*sin(IWF2)./n2F);
UXF2=UWF2+IWF2-IXF2;
LXF2=r2+(r2.*sin(IXF2))./sin(UXF2);
LWF3=LXF2-d2;
UWF3=UXF2;
IWF3=asin((LWF3-r3).*sin(UWF3)./r3);
IXF3=asin(n2F*sin(IWF3)./n0);
UXF3=UWF3+IWF3-IXF3;
LXF3=r3+(r3.*sin(IXF3))./sin(UXF3);
%---------------C光近轴光线追击iwC1=hCF./r1;
ixC1=iwC1.*n0./n1C;
uxC1=iwC1-ixC1;
lxC1=r1+r1.*ixC1./uxC1;
lwC2=lxC1-d1;
uwC2=uxC1;
iwC2=(lwC2-r2).*uwC2./r2;
ixC2=n1C.*iwC2./n2C;
uxC2=uwC2+iwC2-ixC2;
lxC2=r2+r2.*ixC2./uxC2;
lwC3=lxC2-d2;
uwC3=uxC2;
iwC3=(lwC3-r3).*uwC3./r3;
ixC3=n2C.*iwC3./n0;
uxC3=uwC3+iwC3-ixC3;
lxC3=r3+r3.*ixC3./uxC3;
%----------C光轴外光线追击(实际)
IWC1=asin(hCF/r1);
IXC1=asin(n0.*sin(IWC1)./n1C);
UXC1=0+IWC1-IXC1;
LXC1=r1+(r1.*sin(IXC1)./sin(UXC1));
LWC2=LXC1-d1;
UWC2=UXC1;
IWC2=asin((LWC2-r2).*sin(UWC2)./r2);
IXC2=asin(n1C.*sin(IWC2)./n2C);
UXC2=UWC2+IWC2-IXC2;
LXC2=r2+(r2.*sin(IXC2))./sin(UXC2);
LWC3=LXC2-d2;
UWC3=UXC2;
IWC3=asin((LWC3-r3).*sin(UWC3)./r3);
IXC3=asin(n2C.*sin(IWC3)./n0);
UXC3=UWC3+IWC3-IXC3;
LXC3=r3+(r3.*sin(IXC3))./sin(UXC3);
%---------------求色差曲线
SC=LXF3-LXC3;
%-求D光hd=9是和hcf=0.707*h的色差
[j,k]=size(0:0.01:h);
[n,m]=size(0:0.01:0.707*h);
qyQC=qcD(k)
qySC=SC(m)
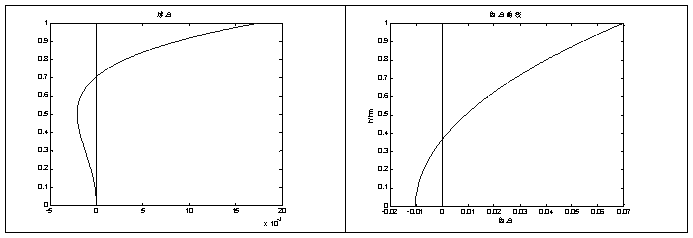
%--球差、色差曲线(校正前后)
plot(qcD,hD/hm,'b',dQC,hD/hm,'g');title('校正前球差')
hold on
plot(0,[0:0.01:hm]/hm,'k')
figure
plot(SC,hCF/hm,'b',dSC,hCF/hm,'g');
title('色差曲线');
xlabel('色差');
ylabel('h/hm');
hold on
plot(0,[0:0.01:hm]/hm,'k')
matlab输出为:球差为: 0.0200mm
带光的色差:0.0294mm
及
校正前的D光球差曲线和C光与F光的色差曲线:
3-14、校正色差(通过改变最后一面在半径)
由于色差校正量很小,所加校正色差用的薄透镜的光焦度甚小,可以忽略它对球差的影响,故对F光和C光用高斯公式:
 ;
;  ; (11)
; (11)
二者相减得:
 (12)
(12)
式中为原有的最后一面半径,为修改后的半径, 为原有带光色差,
为原有带光色差, 为要求达到的色差,消色差时令其为零。因所加的薄透镜光焦度甚小,可以认为
为要求达到的色差,消色差时令其为零。因所加的薄透镜光焦度甚小,可以认为 ,即可取原光路计算值。由此,上式为:
,即可取原光路计算值。由此,上式为:
 (13)
(13)
按此式,设计中消色差时应有的第三面半径
Matlab的计算程序如下:
%像差校正(修改最后一面的半径)
r3d=1/r3+(0-qySC)/((n2F-n2C)*(LXF3(m)*LXC3(m)));
r3j=1/r3d
%--校正后追迹
lwDj3=lxD2-d2;
uwDj3=uxD2;
iwDj3=(lwDj3-r3j).*uwDj3./r3j;
ixDj3=n2.*iwDj3./n0;
uxDj3=uwDj3+iwDj3-ixDj3;
lxDj3=r3j+r3j.*ixDj3./uxDj3;
%--轴外
LWDj3=LXD2-d2;
UWDj3=UXD2;
IWDj3=asin((LWDj3-r3j).*sin(UWDj3)./r3j);
IXDj3=asin(n2.*sin(IWDj3)./n0);
UXDj3=UWDj3+IWDj3-IXDj3;
LXDj3=r3j+(r3j.*sin(IXDj3))./sin(UXDj3);
%----F光轴外追迹
LWFj3=LXF2-d2;
UWFj3=UXF2;
IWFj3=asin((LWFj3-r3j).*sin(UWFj3)./r3j);
IXFj3=asin(n2F.*sin(IWFj3)./n0);
UXFj3=UWFj3+IWFj3-IXFj3;
LXFj3=r3j+(r3j.*sin(IXFj3))./sin(UXFj3);
%---------C光光轴追迹
LWCj3=LXC2-d2;
UWCj3=UXC2;
IWCj3=asin((LWCj3-r3j).*sin(UWCj3)./r3j);
IXCj3=asin(n2C.*sin(IWCj3)./n0);
UXCj3=UWCj3+IWCj3-IXCj3;
LXCj3=r3j+(r3j.*sin(IXCj3))./sin(UXCj3);
%-------------校正后追迹
dSC=LXFj3-LXCj3;
dQC=LXDj3-lxDj3;
df=hD./sin(UXDj3)-hD./uxDj3;
OSC=(df-dQC)./(hD./sin(UXD3));
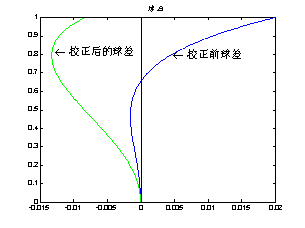
%---球差、色差曲线(校正前后)
plot(qcD,hD/hm,'b',dQC,hD/hm,'g');title('球差')
text([-0.01316;0.004846],[0.82;0.8044],{' \leftarrow 校正后的球差';'\leftarrow 校正前球差'},'FontSize',15);
hold on
plot(0,[0:0.01:hm]/hm,'k')
figure
plot(SC,hCF/hm,'b',dSC,hCF/hm,'g');
title('色差曲线');xlabel('色差');ylabel('h/hm');
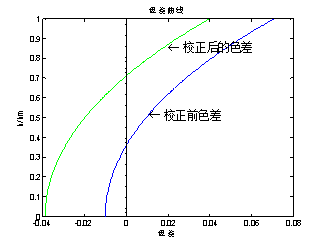
text([0.01874;0.01096],[0.86;0.5178],{' \leftarrow 校正后的色差';'\leftarrow 校正前色差'},'FontSize',15);
hold on
plot(0,[0:0.01:hm]/hm,'k')
输出为:校正后的第三面的半径:R3=-152.2614mm
3-15、计算改变最后一面半径后的物镜球差和色差
使用3-15的程序后可得:
校正第三面后的色差为:-3.6704e-004mm
校正第三面后的球差为:-0.0083mm
校正第三面后的正弦差为:1.6899e-004mm
校正第三面后的df为:-7.9786e-004mm
由结果可知:对第三面单独作光路计算后,求得系统像差如下:
 mm
mm
 mm
mm
 mm
mm
 mm
mm
可见,用改变双胶合物镜第三面半径的办法来校正色差,效果良好的。而且,由于第三面对色差和球差的贡献都是负的,其半径较小时,使负色差和负球差的绝对值均有所增大,在校正好色差的同时,球差也正好得到校正。
此物镜带光的球差和正弦差分别为:


校正第三面后的球差和色差曲线图:
3-16、计算物镜边光和带光在正弦差
使用3-15的程序后可得物镜边光和带光的正弦差为:
物镜边光正弦差: 
带光正弦差: 
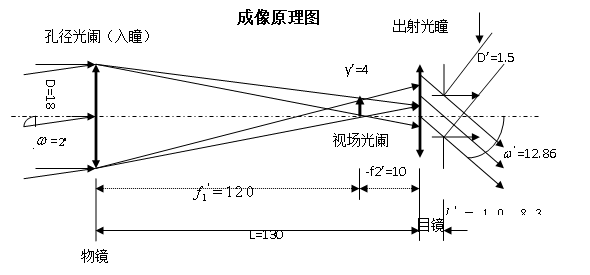
3-17、绘制光学系统图及物镜结构图(单位:mm)
四、ZEMAX设计
4-1、ZEMAX设计过程
1、打开ZEMAX设计软件,观察设计界面。
2、新建一个文件并进行保存,文件名保存为“112宁德江.ZMX”;
3、对初始参数进行设置,在System下选择“General”→“Aperture”(或者是使用快捷键Ctrl+G),在“Aperture type”的下拉菜单选择“Entrance Pupil Diameter”,在“Aperture Value”下输入“18”,然后点击“OK”退出;
4、在System下选择“Field Data”(或使用快捷键Ctrl+F),观察弹出的设计界面,首先选择“Angle”,然后再“Use”下将1、2、3单击选中,在1中的“Y-Field”下输入0,在2中的“Y-Field”下输入1.2,在3中的“Y-Field”下输入2,之后点击“OK”退出;
5、在System下选择“Wavelength Data”,在默认状态下,点击左下角的“Select”,然后点击“OK”退出;
6、在LDE中选中像面(IMA),在此面前加入两个面,点击键盘上的“Insert”键两次,就加入了两个面;
7、在STO面的半径下输入“74.228626”并设置为可调,厚度下输入“1.7028”,玻璃类型下输入“BK7”;
8、在2面的半径下输入“-52.598063” 并设置为可调,厚度下输入“1.10”,玻璃类型下输入“SF5”;
9、在3面的半径下输入“-154.597857” 并设置为可调,在厚度框下点击鼠标右键,在“Solve Type”下拉菜单下选择“Marginal Ray Height”;
10、对双胶合透镜组进行优化,用优化函数进行优化,点击键盘上的“F6”,然后点击“Tools” →“Default Merit Function”,直接点击“OK” 退出,在评价函数编辑中的“2 BLNK”前插入一行,在类型中输入“EFFL”,在Target下输入120,weight下输入1,之后将其更新一下就可以了;
11、使用分析工具对设计的透镜组进行分析和观察,并将结果“报告4”以bmp格式输出。
12、使用ZEMAX时应该注意,汉化版的可能导不出图片,英文版的比较好用。
4-2、ZEMAX设计的相应表格和参数
(另附一页)
附件
完整程序
clc,clear all,close all;
V1=input('输入k9的阿贝常数V1=')
V2=input('输入zf2的阿贝常数V2=')
fw=input('输入物镜的焦距f=')
n1=input('输入k9透镜的折射率n1=')
n2=input('输入zf2透镜的折射率n2=')
D=input('请输入物镜的通光孔径D=')
h=D/2;syms p2;
w1=V1/(fw*(V1-V2));w2=-V2/(fw*(V1-V2));
rx1=w1;rw2=w1;
A1_p2=((n1+2)/n1)*w1*p2.^2+(((2*n1+1)/(n1-1))*w1.^2-((4*n1+4)/n1)*w1*rx1)*p2-((3*n1+1)/(n1-1))*w1.^2*rx1+((3*n1+2)/n1)*w1*rx1.^2+(n1.^2/(n1-1).^2)*w1.^3
A2_p2=((n2+2)/n2)*w2*p2.^2-(((2*n2+1)/(n2-1))*w2.^2+((4*n2+4)/n2)*w2*rw2)*p2+((3*n2+1)/(n2-1))*w2.^2*rw2+((3*n2+2)/n2)*w2*rw2.^2+(n2.^2/(n2-1).^2)*w2.^3
H=-h^2*fw^2/2;dL=(A1_p2+A2_p2)*H;
A=[((n1+2)/n1)*w1,((2*n1+1)/(n1-1))*w1.^2-((4*n1+4)/n1)*w1*rx1,-((3*n1+1)/(n1-1))*w1.^2*rx1+((3*n1+2)/n1)*w1*rx1.^2+(n1.^2/(n1-1).^2)*w1.^3]
B=[((n2+2)/n2)*w2,-(((2*n2+1)/(n2-1))*w2.^2+((4*n2+4)/n2)*w2*rw2),((3*n2+1)/(n2-1))*w2.^2*rw2+((3*n2+2)/n2)*w2*rw2.^2+(n2.^2/(n2-1).^2)*w2.^3];C1=A+B;
deta=C1(2)^2-4*C1(1)*C1(3)
if(deta>0|abs(deta)<10^-4)
fprintf('可有消球差解')
end
if (abs(deta)<10e-6)
y=-C1(2)/(2*C1(1));p2=y
else
x=roots(C1)
for n=1:2
p2=x(n);
OSC(n)=-h^2*(((n1+1)*w1*p2/n1-(2*n1+1)*w1*rx1/n1+n1*w1^2/(n1-1))+((n2+1)*w2*p2/n2-(2*n2+1)*w2*rw2/n2-n2*w2^2/(n2-1)))/2;
end
if(abs(OSC(1))>abs(OSC(2)))
p2=x(2)
else
p2=x(1)
end
end
OSC=-h^2*(((n1+1)*w1*p2/n1-(2*n1+1)*w1*rx1/n1+n1*w1^2/(n1-1))+((n2+1)*w2*p2/n2-(2*n2+1)*w2*rw2/n2-n2*w2^2/(n2-1)))/2
p1=p2+w1/(n1-1);p3=p2-w2/(n2-1);
R=[p1,p2,p3];fprintf('曲率半径:\n')
for i=1:3
r(i)=1/R(i);fprintf('r(%d)=%f\n',i,r(i))
end
tm=input('输入物镜边缘最小厚度tm=')
d1=D^2/(8*fw*(n2-1))+tm
%-------------像差校正
d2=input('输入第二物镜中心最小厚度d2=')
n1F=input('输入K9的F光折射率n1F=')
n1C=input('输入K9的C光折射率n1C=')
n2F=input('输入zf2F光折射率n2F=')
n2C=input('输入zf2C光折射率n2F=')
n0=1;hm=h;hD=[0:0.01:h];hCF=[0:0.01:h];
r1=r(1);r2=r(2);r3=r(3);
%--------D光近轴光线追击
iwD1=hD./r1;ixD1=iwD1.*n0./n1;
uxD1=iwD1-ixD1;lxD1=r1+r1.*ixD1./uxD1;
lwD2=lxD1-d1;uwD2=uxD1;
iwD2=(lwD2-r2).*uwD2./r2;ixD2=n1.*iwD2./n2;
uxD2=uwD2+iwD2-ixD2;lxD2=r2+r2.*ixD2./uxD2;
lwD3=lxD2-d2;uwD3=uxD2;
iwD3=(lwD3-r3).*uwD3./r3;ixD3=n2.*iwD3./n0;
uxD3=uwD3+iwD3-ixD3;lxD3=r3+r3.*ixD3./uxD3;
IWD1=asin(hD./r1);
IXD1=asin(n0.*sin(IWD1)./n1);
UXD1=0+IWD1-IXD1;
LXD1=r1+(r1.*sin(IXD1)./sin(UXD1));
LWD2=LXD1-d1;UWD2=UXD1;
IWD2=asin((LWD2-r2).*sin(UWD2)./r2) IXD2=asin(n1.*sin(IWD2)./n2);
UXD2=UWD2+IWD2-IXD2;
LXD2=r2+(r2.*sin(IXD2))./sin(UXD2);
LWD3=LXD2-d2;UWD3=UXD2;
IWD3=asin((LWD3-r3).*sin(UWD3)./r3)
IXD3=asin(n2.*sin(IWD3)./n0);
UXD3=UWD3+IWD3-IXD3;
LXD3=r3+(r3.*sin(IXD3))./sin(UXD3);
qcD=LXD3-lxD3;
%-------------F光近轴光线追击
iwF1=hCF./r1;
ixF1=iwF1.*n0./n1F;
uxF1=iwF1-ixF1;
lxF1=r1+r1.*ixF1./uxF1;
lwF2=lxF1-d1;uwF2=uxF1;
iwF2=(lwF2-r2).*uwF2./r2;
ixF2=n1F.*iwF2./n2F;uxF2=uwF2+iwF2-ixF2;
lxF2=r2+r2.*ixF2./uxF2;
lwF3=lxF2-d2;uwF3=uxF2;
iwF3=(lwF3-r3).*uwF3./r3;
ixF3=n2F.*iwF3./n0;uxF3=uwF3+iwF3-ixF3;
lxF3=r3+r3.*ixF3./uxF3;
IWF1=asin(hCF./r1);
IXF1=asin(n0.*sin(IWF1)./n1F);
UXF1=0+IWF1-IXF1;
LXF1=r1+(r1.*sin(IXF1)./sin(UXF1));
LWF2=LXF1-d1;UWF2=UXF1;
IWF2=asin((LWF2-r2).*sin(UWF2)./r2)
IXF2=asin(n1F.*sin(IWF2)./n2F);
UXF2=UWF2+IWF2-IXF2;
LXF2=r2+(r2.*sin(IXF2))./sin(UXF2);
LWF3=LXF2-d2;UWF3=UXF2;
IWF3=asin((LWF3-r3).*sin(UWF3)./r3) IXF3=asin(n2F*sin(IWF3)./n0);
UXF3=UWF3+IWF3-IXF3;
LXF3=r3+(r3.*sin(IXF3))./sin(UXF3);
%-----------C光近轴光线追击
iwC1=hCF./r1;ixC1=iwC1.*n0./n1C;
uxC1=iwC1-ixC1;
lxC1=r1+r1.*ixC1./uxC1;
lwC2=lxC1-d1;uwC2=uxC1;
iwC2=(lwC2-r2).*uwC2./r2;
ixC2=n1C.*iwC2./n2C;
uxC2=uwC2+iwC2-ixC2;lxC2=r2+r2.*ixC2./uxC2;
lwC3=lxC2-d2;uwC3=uxC2;
iwC3=(lwC3-r3).*uwC3./r3;
ixC3=n2C.*iwC3./n0;uxC3=uwC3+iwC3-ixC3;
lxC3=r3+r3.*ixC3./uxC3;
IWC1=asin(hCF/r1);
IXC1=asin(n0.*sin(IWC1)./n1C);
UXC1=0+IWC1-IXC1;
LXC1=r1+(r1.*sin(IXC1)./sin(UXC1));
LWC2=LXC1-d1;UWC2=UXC1;
IWC2=asin((LWC2-r2).*sin(UWC2)./r2)
IXC2=asin(n1C.*sin(IWC2)./n2C);
UXC2=UWC2+IWC2-IXC2;
LXC2=r2+(r2.*sin(IXC2))./sin(UXC2);
LWC3=LXC2-d2;UWC3=UXC2;
IWC3=asin((LWC3-r3).*sin(UWC3)./r3)
IXC3=asin(n2C.*sin(IWC3)./n0);
UXC3=UWC3+IWC3-IXC3;
LXC3=r3+(r3.*sin(IXC3))./sin(UXC3);
SC=LXF3-LXC3;[j,k]=size(0:0.01:h);
[n,m]=size(0:0.01:0.707*h);
qyQC=qcD(k),qySC=SC(m)
%------像差校正(修改最后一面的半径)
r3d=1/r3+(0-qySC)/((n2F-n2C)*(LXF3(m)*LXC3(m)));r3j=1/r3d
%---------------校正后追迹
lwDj3=lxD2-d2;uwDj3=uxD2;
iwDj3=(lwDj3-r3j).*uwDj3./r3j;
ixDj3=n2.*iwDj3./n0;uxDj3=uwDj3+iwDj3-ixDj3
lxDj3=r3j+r3j.*ixDj3./uxDj3;
LWDj3=LXD2-d2;UWDj3=UXD2;
IWDj3=asin((LWDj3-r3j).*sin(UWDj3)./r3j);
IXDj3=asin(n2.*sin(IWDj3)./n0);
UXDj3=UWDj3+IWDj3-IXDj3;
LXDj3=r3j+(r3j.*sin(IXDj3))./sin(UXDj3);
%---------------F光轴外追迹
LWFj3=LXF2-d2;UWFj3=UXF2;
IWFj3=asin((LWFj3-r3j).*sin(UWFj3)./r3j);
IXFj3=asin(n2F.*sin(IWFj3)./n0);
UXFj3=UWFj3+IWFj3-IXFj3;
LXFj3=r3j+(r3j.*sin(IXFj3))./sin(UXFj3);
LWCj3=LXC2-d2;UWCj3=UXC2;
IWCj3=asin((LWCj3-r3j).*sin(UWCj3)./r3j);
IXCj3=asin(n2C.*sin(IWCj3)./n0);
UXCj3=UWCj3+IWCj3-IXCj3;
LXCj3=r3j+(r3j.*sin(IXCj3))./sin(UXCj3);
dSC=LXFj3-LXCj3;dQC=LXDj3-lxDj3;
df=hD./sin(UXDj3)-hD./uxDj3;
OSC=(df-dQC)./(hD./sin(UXD3));
%---------------球差、色差曲线(校正前后)
plot(qcD,hD/hm,'b',dQC,hD/hm,'g'); text([-0.01316;0.004846],[0.82;0.8044],{' \leftarrow 校正后的球差';'\leftarrow 校正前球差'},'FontSize',15);
hold on
plot(0,[0:0.01:hm]/hm,'k')
figure
plot(SC,hCF/hm,'b',dSC,hCF/hm,'g');
title('色差曲线');xlabel('色差');ylabel('h/hm');
text([0.01874;0.01096],[0.86;0.5178],{' \leftarrow 校正后的色差';'\leftarrow 校正前色差'},'FontSize',15);
hold on
plot(0,[0:0.01:hm]/hm,'k')
%-------------校正后球差和色差
jqySC=dSC(m)
jqyQC=dQC(k);jqydf=df(m);jqyOSC=OSC(k);
%---------------校正后带光的球差和正弦dLz=dQC(m);OSCz=OSC(m);