控制系统的根轨迹分析与频域分析
自动控制原理
学院:控计学院
班级:测控1101
姓名:朱木森
学号:1111160127
实验二 控制系统的根轨迹分析与频域分析
一、实验目的
1、掌握如何运用计算机的MATLAB软件进行根轨迹分析
1、 掌握如何用计算机MATLAB软件工具进行系统或环节的频率特性的测试。
二、实验类型
综合性
三、实验设备
计算机
四、实验原理
频率特性函数是静态下正弦输出信号与正弦输入信号的复数符号之比。从频率特性图象上可以很方便的得到关于系统稳定性和动态特性的一些信息。因此,它是研究控制系统的一个重
五 、实验要求
1、预习根轨迹的绘制的方法,编制相应实现的MATLAB程序。
2、在理论上画出实验中惯性环节、振荡环节相应的幅相频率特性,对数幅频和对数相频特性,绘制奈奎斯特图和伯德图;并预先编制实现的MATLAB程序。
3、写出实验报告,对于内容(一)写出实现的MATLAB程序;给出给定系统 的根轨迹图,并分析系统的稳定性;进行实验总结;对于内容(二)给出出惯性环节、振荡环节的实现程序及各实验曲线;将实验结果同理论估计的结果相比较,若不同分析其原因;根据实验曲线能得到哪些结论(稳定性、增益方面的)。
的根轨迹图,并分析系统的稳定性;进行实验总结;对于内容(二)给出出惯性环节、振荡环节的实现程序及各实验曲线;将实验结果同理论估计的结果相比较,若不同分析其原因;根据实验曲线能得到哪些结论(稳定性、增益方面的)。
六、注意事项
命令调用的格式不能随意改写
要工具。
七、实验内容和要求
(一)内容
1、 已知开环传递函数为 绘出闭环系统的根轨迹,并找出根轨迹与虚轴交点处的增益k值。
绘出闭环系统的根轨迹,并找出根轨迹与虚轴交点处的增益k值。
实验程序
H=tf(1,[1,16,36,80,0])
rlocus(H)
 [k,poles]=rlocfind(H)
[k,poles]=rlocfind(H)
实验结果
得到k= 153.9679
坐标分别为 = (-13.7212 + 0.0000i)、 ( -2.6443 + 0.0000i)、( 0.1828 + 2.3802i)、(0.1828 - 2.3802i)。
2、 已知开环传递函数为 绘出闭环系统的根轨迹。并分析系统的稳定性。
绘出闭环系统的根轨迹。并分析系统的稳定性。
实现程序:
clear all
H=zpk(-3,[-1,-1,-2,-4],1)
rlocus(H)
 [k,poles]=rlocfind(H)
[k,poles]=rlocfind(H)
得到结果:
K= 28.3623,故知k取值范围为(0,28.3623)时系统稳定
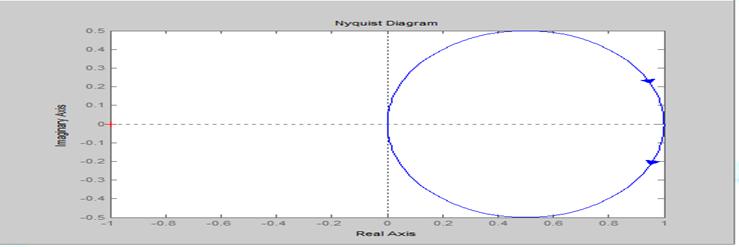
3、 编程实现惯性环节 的频率特性,编程实现幅相频率特性,对数幅频和对数相频特性,绘制奈奎斯特图和伯德图。
的频率特性,编程实现幅相频率特性,对数幅频和对数相频特性,绘制奈奎斯特图和伯德图。
奈奎斯特图
1) 实现程序:
clear all
H=tf(1,[0.005,1])
nyquist(H)
2) 得到结果
Bode图
1) 实现程序
clear all
H=tf(1,[0.005,1])
bode(H)
grid on
2) 得到结果
4. 编程实现振荡环节的频率特性。
 ,用MATLAB软件编程仿真出振荡环节的幅相频率特性,对数幅频和对数相频特性,绘制奈奎斯特图和波德图,增益相位裕度的伯德图。并在同一极坐标图和伯德图中绘制不同
,用MATLAB软件编程仿真出振荡环节的幅相频率特性,对数幅频和对数相频特性,绘制奈奎斯特图和波德图,增益相位裕度的伯德图。并在同一极坐标图和伯德图中绘制不同 下的响应曲线。(要获得谐振峰值、谐振频率,带宽等关键点的值。)
下的响应曲线。(要获得谐振峰值、谐振频率,带宽等关键点的值。)
1)nyquist图实现程序
clear all
T=0.002;e=[0.2 0.4 0.8];
for i=1:3
H=tf(1,[T*T,2*e(i)*T,1])
nyquist(H)
hold on
end
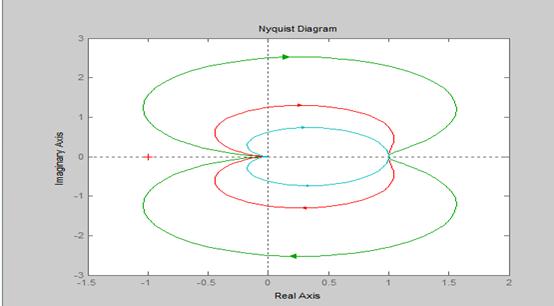 2)程序结果
2)程序结果
2)bode图实现程序
close all
clc
T=0.002;e=[0.2 0.4 0.8];
for i=1:3
H=tf(1,[T*T,2*e(i)*T,1])
bode(H)
hold on
grid on
end
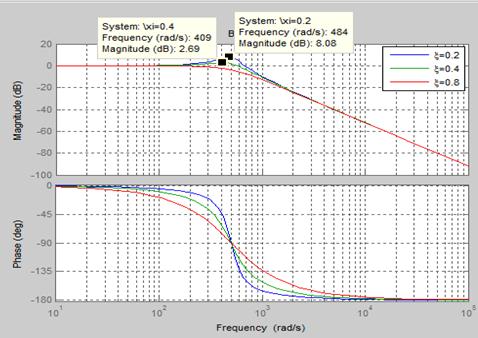
bode图结果由图可知,谐振频率为e=0.2时,谐振频率为484,谐振峰值为8.08dB,带宽为756,;e=0.4时,谐振频率为409,谐振峰值为2.69dB,带宽为431
思考题
如何利用Bode图来分析系统的增益裕度、相位裕度、及其稳定性?
答:?相角裕度
幅值裕度
 为系统的截止频率,
为系统的截止频率, 为系统的穿越频率,均可由bode图得到,而且当幅值裕度和相角裕度均为正值时,系统稳定。
为系统的穿越频率,均可由bode图得到,而且当幅值裕度和相角裕度均为正值时,系统稳定。
第二篇:东南大学自控实验报告 Matlab-Simulink_仿真实验
东南大学仪器科学与工程学院学院
实 验 报 告
课程名称: 自动控制原理
实验名称: Matlab/Simulink 仿真实验
院(系): 仪器科学与工程学院 专 业:测控技术与仪器
姓 名: 刘XX 学 号: 22011XX
实验室: 机电实验平台 实验组别:
同组人员: XX 实验时间:2013 年 11 月20 日
评定成绩: 审阅教师:
目录
一、实验目的……………………………………….3
二、预习要求……………………………………….3
三、实验内容……………………………………….3
四、实验总结……………………………………….14
一、实验目的:
1. 学习系统数学模型的多种表达方法,并会用函数相互转换。
2. 学习模型串并联及反馈连接后的系统传递函数。
3. 掌握系统BODE图,根轨迹图及奈奎斯特曲线的绘制方法。并利用其对系统进行分析。
4. 掌握系统时域仿真的方法,并利用其对系统进行分析。
二、预习要求:
借阅相关Matlab/Simulink参考书,熟悉能解决题目问题的相关Matlab函数。
三、实验内容:
1.已知H(s)= ,求H(s)的零极点表达式和状态空间表达式。
,求H(s)的零极点表达式和状态空间表达式。
答:
(1)零极点表达式:
>> num=[0.05 1];
den=conv([0.2 1],[0.1 1]);
sys1=tf(num,den)
sys2=zpk(sys1)
sys1 =
0.05 s + 1
--------------------
0.02 s^2 + 0.3 s + 1
Continuous-time transfer function.
sys2 =
2.5 (s+20)
------------ % 零极点表达式
(s+10) (s+5)
Continuous-time zero/pole/gain model.
状态空间表达式:
>> num=[0.05 1];
den=conv([0.2 1],[0.1 1]);
sys1=tf(num,den);
sys3=ss(sys1)
sys3 =
a =
x1 x2
x1 -15 -6.25
x2 8 0
b =
u1
x1 4
x2 0
c =
x1 x2
y1 0.625 1.562
d =
u1
y1 0
Continuous-time state-space model.
2.已知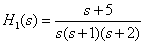 ,
, 。
。
(1) 求两模型串联后的系统传递函数。
答:
>> m1=[1,5];
n1=conv([1],conv([1,1],[1,2]));
m2=1;
n2=[1,1];
[m,n]=series(m1,n1,m2,n2)
G=tf(m,n)
m =
0 0 1 5
n =
1 4 5 2
G =
s + 5
--------------------- % 两模型串联后的系统传递函数 H(s)=H1(s)*H2(s)
s^3 + 4 s^2 + 5 s + 2
Continuous-time transfer function.
(2) 求两模型并联后的系统传递函数。
答:
>> m1=[1,5];
n1=conv([1],conv([1,1],[1,2]));
m2=1;
n2=[1,1];
[m,n]=parallel(m1,n1,m2,n2)
G=tf(m,n)
m =
0 2 9 7
n =
1 4 5 2
G =
2 s^2 + 9 s + 7
--------------------- % 两模型并联后的系统传递函数H(s)=H1(s)+H2(s)
s^3 + 4 s^2 + 5 s + 2
Continuous-time transfer function.
(3) 求两模型在负反馈连接下的系统传递函数。
答:
>> m1=[1,5];
n1=conv([1],conv([1,1],[1,2]));
m2=1;
n2=[1,1];
[m,n]=feedback(m1,n1,m2,n2,-1)
G=tf(m,n)
m =
0 1 6 5
n =
1 4 6 7
G =
s^2 + 6 s + 5
--------------------- % 两模型在负反馈连接下的系统传递函数
s^3 + 4 s^2 + 6 s + 7
Continuous-time transfer function.
3. 作出上题中(1)的BODE图,并求出幅值裕度与相位裕度。
答:
>> num=[1,5];
den=[1,4,5,2];
w=logspace(-1,2);
sys=tf(num,den)
bode(num,den);
[g,p,wg,wp]=margin(sys)
sys =
s + 5
---------------------
s^3 + 4 s^2 + 5 s + 2
Continuous-time transfer function.
g =
% 幅值裕度
18.0016
p =
% 相位裕度
67.3499
wg =
% 相角频率
4.7960
wp =
% 截止频率
1.1127
l 幅值裕度 g = 18.0016
l 相位裕度 p = 67.3499
l 相角频率 wg=4.7960
l 截止频率 wp=1.1127
l Bode图
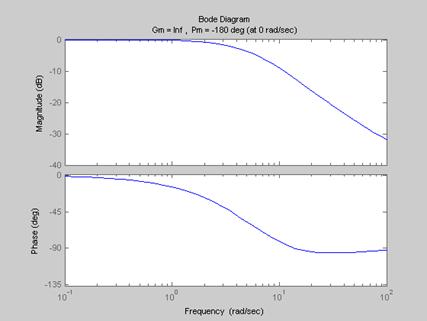
4.给定系统开环传递函数为 ,绘制系统的根轨迹图与奈奎斯特曲线,并求出系统稳定时的增益K的范围。
,绘制系统的根轨迹图与奈奎斯特曲线,并求出系统稳定时的增益K的范围。
答:
(1)代码
>> num=[1];
den=conv([1,2],[1,2,5]);
G=tf(num,den)
figure(1)
pzmap(G);
figure(2)
rlocus(G);
figure(3)
nyquist(G)
G =
1
----------------------
s^3 + 4 s^2 + 9 s + 10
Continuous-time transfer function.
(2)零极点分布图和根轨迹图
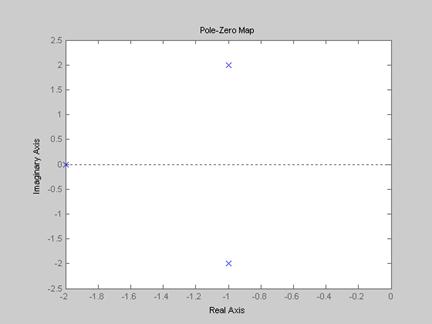
图1 零极点分布图
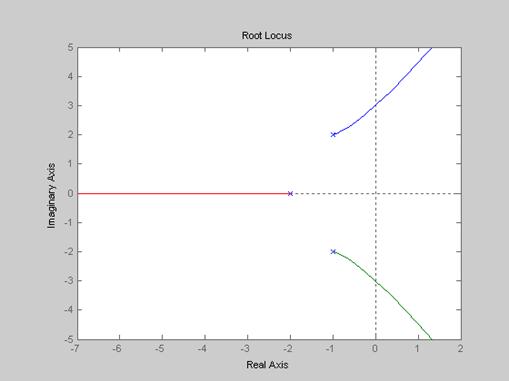
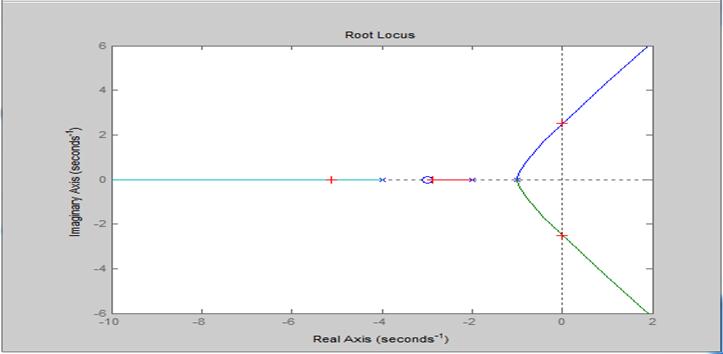
图2 根轨迹图
(3)奈奎斯特曲线
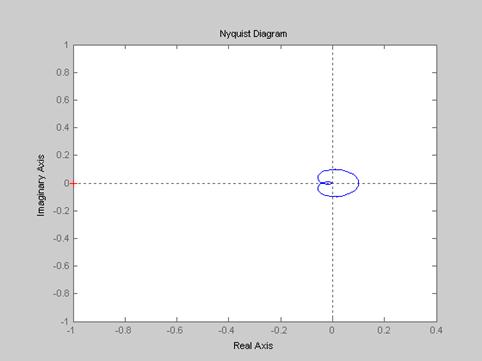
图3 Nyquist图

图4 Nyquist图
(4)系统稳定时的增益K的范围
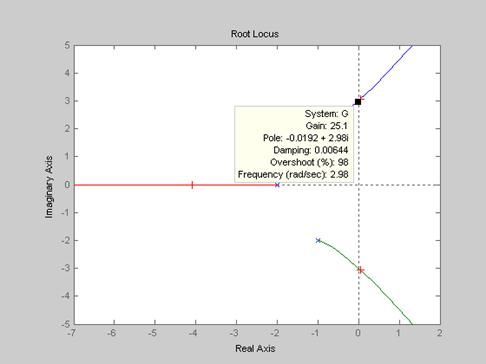
根轨迹曲线(标记处为 K 的临界值) 从图中得出其坐标为 0+3.01i ,此时 K 的临界值为 25.7。即当增益K<25.7时,系统稳定。
>> [r,k]=rlocus(num,den)
r =
1.0e+02 *
-0.0100 + 0.0200i -0.0100 - 0.0200i -0.0200
-0.0091 + 0.0205i -0.0091 - 0.0205i -0.0217
-0.0085 + 0.0209i -0.0085 - 0.0209i -0.0231
-0.0074 + 0.0218i -0.0074 - 0.0218i -0.0253
-0.0057 + 0.0233i -0.0057 - 0.0233i -0.0286
-0.0035 + 0.0256i -0.0035 - 0.0256i -0.0330
-0.0006 + 0.0292i -0.0006 - 0.0292i -0.0388
0.0030 + 0.0341i 0.0030 - 0.0341i -0.0459
0.0074 + 0.0407i 0.0074 - 0.0407i -0.0547
0.0128 + 0.0491i 0.0128 - 0.0491i -0.0655
0.0194 + 0.0598i 0.0194 - 0.0598i -0.0788
0.7746 + 1.3650i 0.7746 - 1.3650i -1.5893
Inf Inf Inf
k =
1.0e+06 *
Columns 1 through 10
0 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 0.0001 0.0002
Columns 11 through 13
0.0003 3.9147 Inf
5、对内容4中的系统,当K=10和40时,分别作出闭环系统的阶跃响应曲线,要求用Simulink实现。
答:
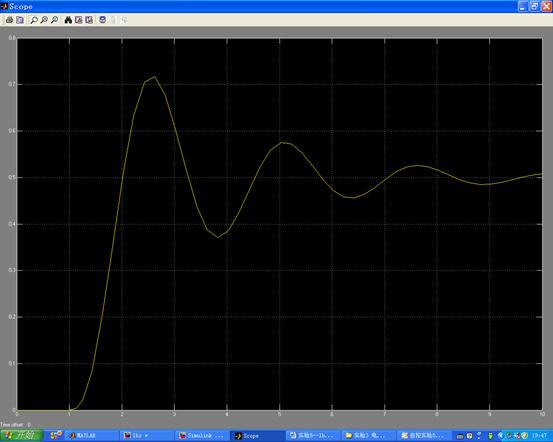
(1) K=10
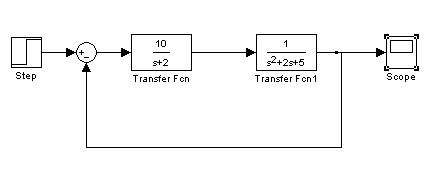
l 闭环系统的阶跃响应曲线
(2) K=40
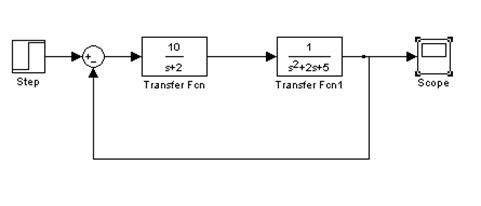
l 闭环系统的阶跃响应曲线
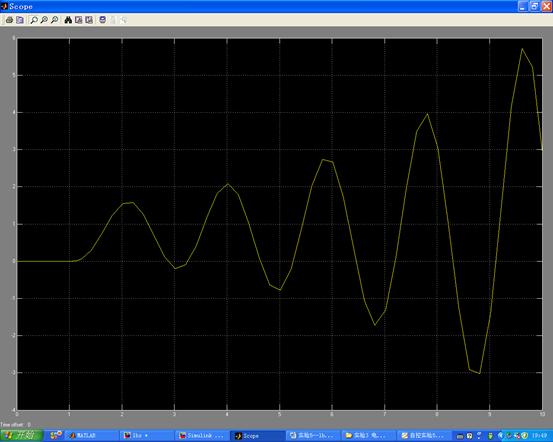
(3) 实验结论
由图中可以看出:
K=10时,曲线收敛,系统趋于稳定;
K=40时,曲线发散,系统不稳定。
四、实验总结
在本次实验中,通过对 MATLAB 实验的边做边学,,我还对课程中有些不理解的内容进一步加深了印象。我想起我当时学习根轨迹画图时,总是感觉很纠结,感觉画图不准确或者不理解,而这次通 过 MATLAB 简单地敲几个代码进去而画出了根轨迹的图,加深对课本中知识的理解,受益很多。最后,特别感谢此次实验课老师的悉心辅导和自控原理老师的课堂理论教导!