自 动 控 制 原 理
实 验 报 告 册
班级:
学号:
姓名:
非线性环节对系统动态过程的影响
一、 实验目的
1. 了解非线性环节特性;
2. 了解非线性环节对系统动态过程的响应;
3. 学会应用描述函数法研究非线性系统的稳定性。
二、 实验原理
1. 非线性系统和线性系统存在本质差别:
(1)线性系统可采用传递函数、频率特性、脉冲过渡函数等概念,同时由于线性系统的运动形式和输入幅值、初始状态无关,通常是在典型输入函数和零初始条件下进行研究。
(2)非线性系统由于叠加原理不成立,线性系统的上述方法不适用,所以常采用相平面方法和描述函数方法进行研究。
2. 实验从两方面观察非线性:相轨迹和动态响应
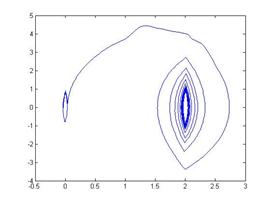
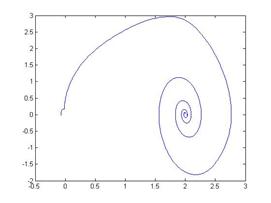
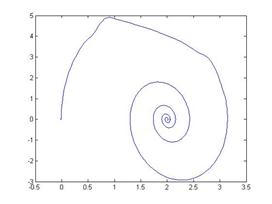
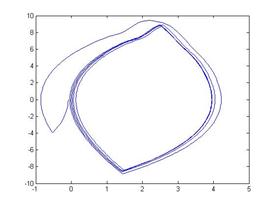
(1)相轨迹:相平面上的点随时间变化描绘出来的曲线叫相轨迹。相平面的相坐标为C和dC,实验软件当中给出的就是在此坐标下自动描绘的相轨迹。初始条件不同,系统的运动趋势不同,所描绘的相轨迹也会有所不同。
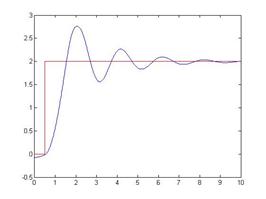
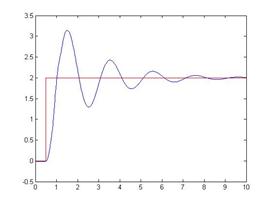
(2)动态响应:对比有无非线性环节时系统动态响应过程。
三、 实验电路

2. 非线性环节由计算机模拟产生,它们分别是:
(1) 磨擦特性,如图7.3。 M=1
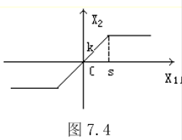
(2) 饱和特性,如图7.4。 K=1,S=0.5
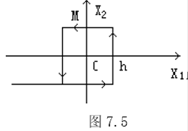
(3) 继电特性,如图7.5。 M=1, h=0.5
四、实验数据及图像
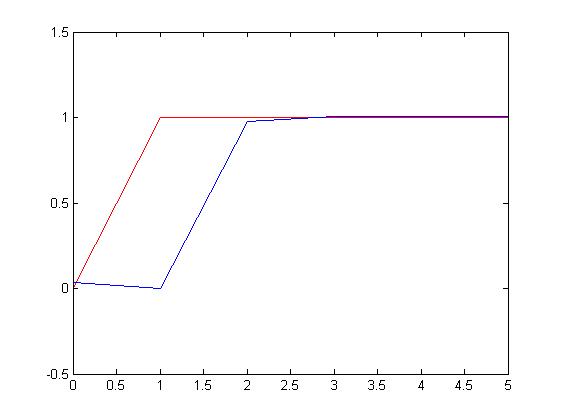
绘制动态响应过程及相轨迹
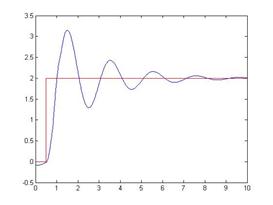
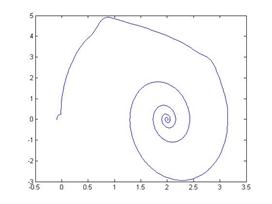
(1)系统无非线性环节
(2)磨擦特性,M=1

(3) 饱和特性,K=1,S=0.5
S=2时,
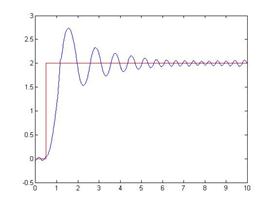
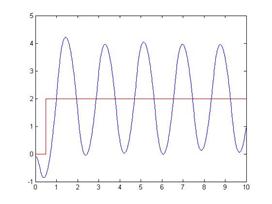
(4) 继电特性,M=1, h=0.5
绘制负倒描述函数曲线和G(jω) 曲线,求出产生自振时的开环增益。
(1)摩擦特性
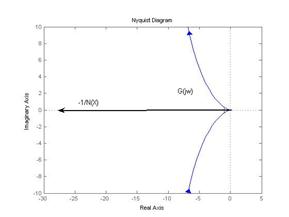
摩擦特性负倒描述函数与G(jω)曲线没有交点,该系统不含周期运动,该非线性系统稳定。(2)饱和特性
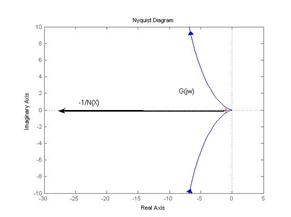
饱和特性负倒描述函数与G(jω)曲线没有交点,该系统不含周期运动,该非线性系统稳定。
(3)继电特性
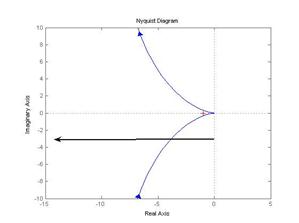
继电特性的负倒描述函数与G(jω)有交点,故存在周期运动。分析知交点处为稳定的周期运动,即产生自振。算得交点处点的ω=1.67,此时的系统增益为K=3.07。
五、结果分析
饱和特性:
饱和特性的等效增益曲线表明,饱和现象将使系统的开环增益在饱和区时下降。控制系统设计时,为使功放元件得到充分利用,应注使功放级首先进入饱和;为获得较好的动态性能,应通过合适选择线性区增益和饱和电压,使系统既能获得较小的超调量,又能保证较大的开环增益,减小稳态误差。饱和区对系统闭环极点的分析过程与继电特性类同。
摩擦特性:
摩擦对系统性能的影响最主要的是造成系统低速运动的不平滑性,即当系统的输入轴作低速平稳运转时,输出轴的旋转呈现跳跃式的变化。这种低速爬行现象是由静摩擦到动摩擦的跳变产生的。
继电特性:
理想继电特性串入系统,在小偏差时开环增益大,系统的运动一般呈发散性质;而在大偏差时开环增益很小,系统具有收敛性质。故理想继电控制系统最终多半处于自持振荡工作状态。继电特性能够使被控制的执行装置在最大输入信号下工作,可以充分发挥其调节能力,故有可能利用继电特性实现快速跟踪。
第二篇:北航 自控实验5
实验名称:采样系统研究
姓名:
学号:
班级:
实验五:采样系统研究
实验结果
1、 系统模拟运算电路图,并分析采样周期改变对稳定性的影响:
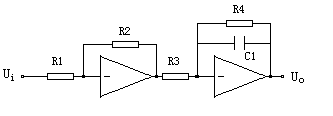
Figure 6 采样系统模拟运算电路图
开环传递函数:  ,电路中参数如下:
,电路中参数如下:
R4=100k,R3=100k, ,
, ,
, ;
;
由系统结构可得开环传递函数:
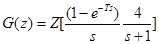
化简可得:

由此计算闭环传递函数:

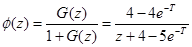

闭环特征根:

由z域稳定条件 ,可得T的范围:
,可得T的范围:

对于实验中涉及到的三个采样频率:  均满足稳定条件,故可知,在实验中三个采样频率下系统都能维持稳定。
均满足稳定条件,故可知,在实验中三个采样频率下系统都能维持稳定。
考虑到系统存在一定稳态误差,可以得到:
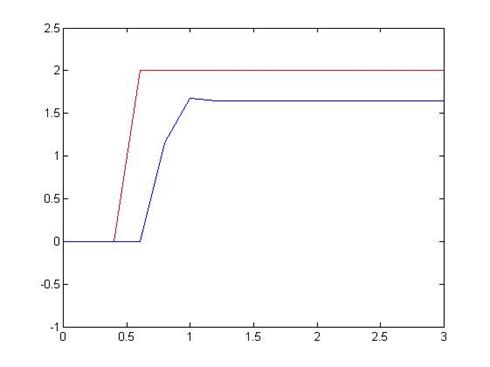
当T=0.01s时,z=0.95:阶跃响应单调收敛,很快接近稳态值;
当T=0.2s时,z=0.094:阶跃响应单调收敛,达到稳态值速度较慢;
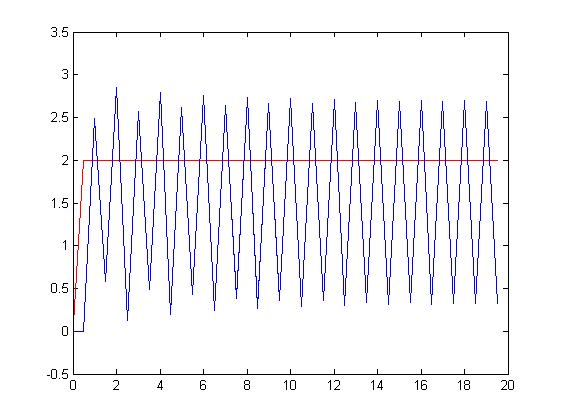
当T=0.5s时,z=-0.967:阶跃响应振荡收敛,达到稳态值速度较慢;
2、 改变采样频率,观察过渡过程:
(1) 采样时间T=0.01s:
(2) 采样时间T=0.2s:
(3) 采样时间T=0.5s:
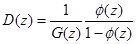
3、 设计最小拍无差系统
将上个实验电路中R2换成一个10uF的电容即可。
根据最少拍系统结构图,对传递函数进行Z变换,同时考虑零阶保持器的传递函数,可得:
 (1)
(1)
Z变换:
 (2)
(2)
对单位阶跃信号 作用下,最少拍无差系统的闭环传递函数为:
作用下,最少拍无差系统的闭环传递函数为:
 (3)
(3)
根据 的计算方程:
的计算方程:
 (4)
(4)
将以上(2)(3)式代入(4)式,最少拍无差系统的闭环传递函数为:
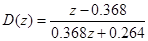
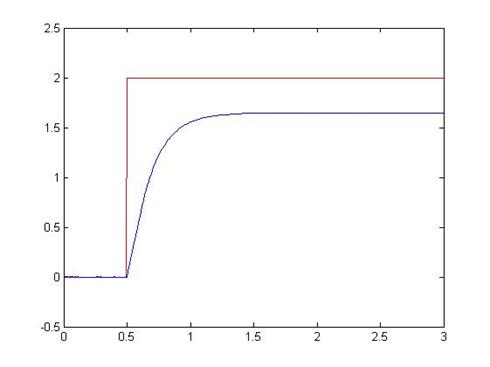
观察并记录理论与实际系统输出波形:
采样周期:T=1s ; 传递函数: