西安石油大学
课 程 设 计
电子工程 学院自动化 专业
自动化0802班
题 目 根轨迹法校正
学 生 周金慧
指导老师 霍爱清
二零一零年十二月
目录
1.1课程设计任务书... 2
2.1 课程设计的题目... 3
2.2 设计思想及内容... 3
2.3编制的程序... 8
2.4设计结论... 8
2.5设计总结... 8
参考文献... 8
《自动控制理论I 》
课程设计任务书
自动控制理论课程设计
2.1 课程设计的题目
6.已知某系统的开环传递函数为: 试用bode图设计法对系统进行超前-滞后串联校正设计,使之满足:
试用bode图设计法对系统进行超前-滞后串联校正设计,使之满足:
(1)在单位斜坡信号r(t)作用下,系统的速度误差系数
(2)系统校正后剪切频率
(3)系统校正后相角稳定裕度 ;。
;。
(4)计算校正后系统的时域指标: 。
。
2.2 设计思想及内容
设计思想:
当系统的性能指标给定为时域指标(如超调量、阻尼系数、自然频率等)时用根轨迹法对系统进行校正比较方便。这是因为系统的动态性能取决于它闭环零、极点在S平面上的分布。
因此,根轨迹法校正的特点就是:如何选择控制器的零、极点,去促使系统的根轨迹朝有利于提高系统性能的方向变化,从而满足设计要求。
设计内容:
(1) 求校正装置的放大系数
根据已知条件 放大系数 rad/s
rad/s
则该系统的开环传函可写为 
(2)校验原系统的阶跃响应超调量是否满足要求.
用以下程序绘制未校正系统的Bode图与单位阶跃响应曲线。
k=10 ; n1=1; %由稳态误差求得;
d1=conv(conv([1 0],[1 1]),[0.5 1]); %分子用conv表示卷积;
s1=tf(k*n1,d1); %转换成传递函数;
figure(1);margin(s1);hold on %绘制Bode图;
figure(2);sys=feedback(s1,1);step(sys) %绘制系统阶跃响应;
sisotool(s1) %绘制根轨迹
程序运行后,可得到下图所示未校正系统的Bode图和阶跃给定响应曲线。
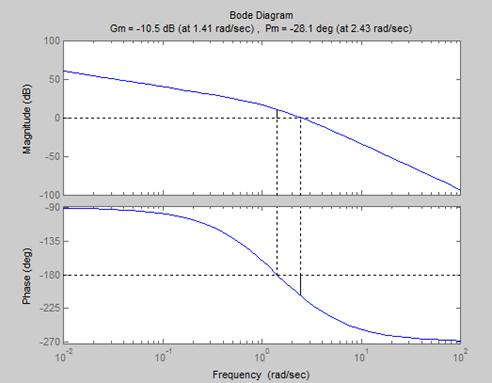
图1 未校正系统的Bode图
由图可知系统的频域性能指标:
幅值稳定裕度: dB
dB  rad/s
rad/s
相角稳定裕度: 剪切频率:
剪切频率: rad/s
rad/s
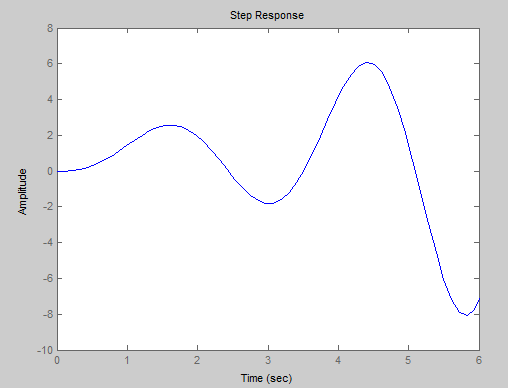
图2 未校正系统的阶跃响应曲线
由图可知系统的时域指标均未达到要求。
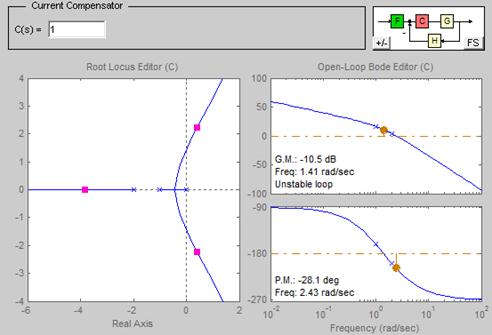
图3 系统未校正的根轨迹图
(3)由期望极点位置确定校正装置传递函数
为使系统时域性能指标达到要求,需确定期望闭环主导极点的位置;设计系统参数达到题目要求,添加零、极点到根轨迹上,调节主导极点位置达到理想位置,得校正后系统的Bode图和单位阶跃响应曲线。
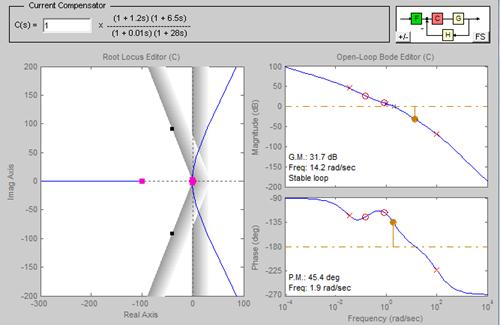
图4 校正后系统的Bode图
校正后系统的频域性能指标:
幅值稳定裕度: dB
dB  rad/s
rad/s
相角稳定裕度: 剪切频率:
剪切频率: rad/s
rad/s
相角稳定裕度:
剪切频率: =rad/s
=rad/s
已达到题目要求。

图5 校正后的阶跃响应曲线
由图可知校正后的时域性能指标: 
已达到题目要求。
添加的零极点:

图6 添加的零极点图
所以系统的校正装置传递函数为:
2.3编制的程序
k=10 ; n1=1; %由稳态误差求得;
d1=conv(conv([1 0],[1 1]),[0.5 1]); %分子用conv表示卷积;
s1=tf(k*n1,d1); %转换成传递函数;
figure(1);margin(s1);hold on %绘制Bode图;
figure(2);sys=feedback(s1,1);step(sys) %绘制系统阶跃响应;
sisotool(s1) %绘制根轨迹
2.4设计结论
时域性能品质指标均已基本达到题目要求。
2.5设计总结
在本次课程设计中,我了解并掌握了在Matlab环境下建立系统模型以及按照要求实现控制系统的根轨迹的设计。 利用Matlab绘制根轨迹,可以使绘制的图形更加准确,而且可以通过改变参数来调节根轨迹的主导极点使其达到理想状态。
参考文献
薛朝妹,霍爱清.《自动控制理论》课程设计指导书.西安:西安石油大学电子工程学院,2007
第二篇:自控课设——高阶系统时域分析
武汉理工大学《自动控制原理》课程设计说明书
目 录
1系统稳定性分析....................................................2
2单位阶跃响应......................................................4
2.1求单位阶跃响应................................................4
2.2系统性能分析..................................................5
3单位斜坡响应......................................................6
3.1求单位斜坡响应................................................6
3.2系统性能分析..................................................7
4单位加速度响应....................................................8
4.1求单位加速度响应..............................................8
4.2系统性能分析..................................................9
5系统根轨迹........................................................9
6心得体会.........................................................11
参考文献...........................................................12
- 1 -
武汉理工大学《自动控制原理》课程设计说明书
高阶系统时域分析
1 系统稳定性分析
任何系统在扰动作用下都会偏离原平衡状态,产生初始偏差。所谓稳定性,是指系统在扰动消失之后,由初始偏差状态恢复到原平衡状态的性能。线性系统的稳定性仅取决于系统自身的固有特性,而与外界条件无关。线性系统稳定的充分必要条件是:闭环系统特征方程的所有根均具有负实部;或者说,闭环传递函数的极点均位于S左半平面。
对于高阶系统,要计算出全部特征根一般来说都很不方便。利用劳斯—赫尔维茨判据则不必求出特征根,就可以方便的判断出系统稳定性。给定系统的闭环特征方程为:D(s)=s4+(4+a)s3+(8+4a)s2+(8a+K)s+Kb=0,由此可列出劳斯表如表1所示。
表1 劳斯表

按照劳斯稳定判据,闭环系统稳定的充分必要条件为:劳斯表中第一列各值均为正。否则系统就不稳定,且第一列各系数符号改变次数即为特征方程正实部根的数目。
当K=10,a=1,b=4时,可得到系统闭环传递函数为:
- 2 -
武汉理工大学《自动控制原理》课程设计说明书
Φ(s)=10(s+4) s4+5s3+12s2+18s+40
此时系统的闭环特征方程为:D(s)=s4+5s3+12s2+18s+40=0. 按劳斯判据可以列出如下劳斯表(表2):
表2
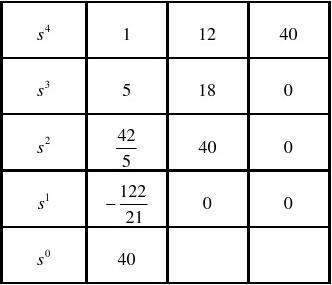
由于劳斯表第一列数值符号有两次变化,故系统不稳定,且存在2个正实部根。用MATLAB求出全部特征根如下:
>> y=roots([1 5 12 18 40])
y =
-2.6823 + 1.6526i
-2.6823 - 1.6526i
0.1823 + 1.9992i
0.1823 - 1.9992i
由此结果可以发现与劳斯判据的结果一致。闭环系统此时不稳定必须对参数加以修改。根据劳斯判据,令表1中第一列全为正。
?4+a>0?(4+a)(8+4a)?(8a+K)?>04+a?? 2[(4a)(84a)(8aK)](8aK)Kb(a4)++?++?+?>0?(4+a)(8+4a)?(8a+K)??Kb>0
即K、a和b必须满足下式:
- 3 -
武汉理工大学《自动控制原理》课程设计说明书
?4+a>0?2?4a+16a+32?K>0?3 22aKKbaKKbaKKbK32+(128+4?)+(256+8?8)+32?16?>0??Kb>0?
该系统才能稳定。因此重新为系统参数赋值:K=15 ,a=b此时系统由四阶变为三阶,开环传递函数变为
Φ(s)=15(s+2)15= 4322s+6s+16s+31s+30(s+3)(s+s+5)
经分析可知,此时K、a、b的值满足要求,系统稳定。
2单位阶跃响应
2.1求单位阶跃响应
单位阶跃响指的是系统在单位阶跃信号r(t)=1(t)作用下的响应。取其拉氏
变换即R(s)=1/s。此时,系统输出为:
115(s+2)15C(s)=R(s)?Φ(s)=?4= 322ss+6s+16s+31s+30s(s+3)(s+s+5)
对上式进行部分分式展开:
10.45450.5455s+1.9092 C(s)=??2ss+3s+s+5
对部分分式进行拉普拉斯反变换,并设初始条件全部为零,即得系统的单位
阶跃响应:
c(t)=L?1[C(s)]=1?0.4545e?3t?0.5455e?0.5tcos(2.1794t)?0.7509e?0.5tsin(2.1794t)
对于一般的高阶系统来说,用这种方法来求取单位阶跃响应都比较麻烦,有
时候甚至很难完成。但利用MATLAB软件则可以很方便的得到响应,并绘制出响应曲线。单位阶跃响应曲线绘制程序如下:
Gp=tf([15],[1 4 8 0]); %建立开环传递函数
sys=feedback(Gp,1,-1); %建立单位负反馈的闭环传递函数
- 4 -
武汉理工大学《自动控制原理》课程设计说明书
step(sys); %绘制单位阶跃响应曲线
title('单位阶跃响应'); %添加曲线标题
xlabel('t');ylabel('c(t)'); %添加坐标轴标注
grid %添加栅格
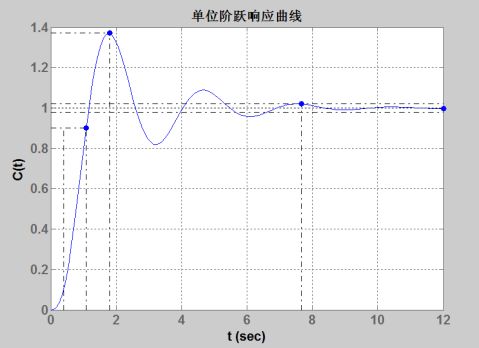
图1 单位阶跃响应曲线
2.2系统性能分析
由MATLAB绘制的曲线(如图1)上可以直接读出系统的一些动态性能参数。 延迟时间td=0.78s;峰值时间tp=1.8s;超调量δ%=37.1%;若取终值的10%到90%,则上升时间tr=0.694s,若取终值从0到100%,则上升时间tr=1.17s;若取2%的误差带,则调节时间ts=7.66s,若取5%的误差带,则调节时间ts=5.12s。 系统的稳态性能指标指的是当时间t→∞时,系统输出响应值。为了方便起见,一般可以使用静态误差系数法。由K=15,a=b时的开环传递函数可知υ=1,该系统为Ⅰ型系统,其静态位置误差系数为:
- 5 -
武汉理工大学《自动控制原理》课程设计说明书
Kp=limGp(s)=lims→0s→015=∞ 2s(s+4s+8)
所以单位阶跃输入作用下系统的稳态误差:
ess(∞)=1=0 1+Kp
3单位斜坡响应
3.1求单位斜坡响应
单位斜坡响指的是系统在单位斜坡信号r(t)=t作用下的响应。取其拉氏变换 R(s)= 1/S2。此时,系统输出为:
C(s)=R(s)?Φ(s)=
展开为部分分式: 15 s2(s+3)(s2+s+5)
C(s)=10.53330.15150.3818s?0.1636?++ 2sss+3s2+s+5
对部分分式进行拉普拉斯反变换,并设初始条件全部为零,得系统的单位斜坡响应:
c(t)=t?0.5333+0.1515e?3t+0.3818e?0.5tcos(2.1794t)?0.1627e?0.5tsin(2.1794t) 利用MATLAB软件绘制该系统在单位斜坡响应曲线。由于MATLAB没有专用的单位斜坡响应函数,故使用任意输入响应函数lsim()。当取lsim(sys,t,t,0)时,即表示单位斜坡响应。程序如下:
Gp=tf([15],[1 4 8 0]); %建立开环传递函数
sys=feedback(Gp,1,-1); %建立单位负反馈的闭环传递函数
t=0:0.5:10; %建立时间段
u=t; %单位斜坡信号
lsim(sys,u,t,0); %绘制单位斜坡响应曲线
title('单位斜坡响应'); %添加曲线标题
xlabel('t');ylabel('c(t)'); %添加坐标轴标注
- 6 -
武汉理工大学《自动控制原理》课程设计说明书
grid %添加栅格
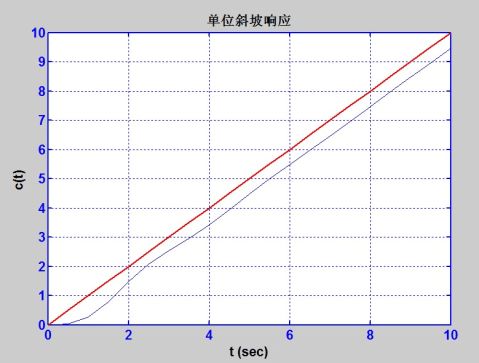
图2 单位斜坡响应曲线
3.2系统性能分析
由系统的开环传递函数可知,υ=1,该系统为Ⅰ型系统,其静态位置误差系数为:
1515= s→0s→os2+4s+88
故系统在单位斜坡输入作用下的稳态误差为: Kv=limsGp(s)=lim
ess(∞)=18=≈0.5333 Kv15
- 7 -
武汉理工大学《自动控制原理》课程设计说明书
4单位加速度响应
4.1求单位加速度响应
单位加速度响指的是系统在单位加速度信号r(t)= t2/2作用下的响应。取其拉氏变换R(s)= 1/s3。此时,系统输出为:
15C(s)=R(s)?Φ(s)=3s(s+3)(s2+s+5)
展开为部分分式形式:
0.01780.533310.05050.0327s+0.4145?+3?+C(s)= 22ssss+3s+s+5
对部分分式进行拉普拉斯反变换,并设初始条件全部为零,得系统的单位加速度响应:
2?3t?0.5t?0.5tct()=0.0178?0.5333t+0.5t?0.0505e+0.0327ecos(2.1794)t+0.1827esin(2.1794)t
利用MATLAB软件绘制该系统在单位加速度响应曲线。由于MATLAB没有专用的单位加速度响应函数,故使用任意输入响应函数lsim()。令输入信号u= t2/2,此时lsim(sys,u,t,0)即表示单位加速度响应。程序如下:
Gp=tf([15],[1 4 8 0]); %建立开环传递函数
sys=feedback(Gp,1,-1); %建立单位负反馈的闭环传递函数 t=0:0.5:10; %建立时间段
u=t.^2/2; %单位加速度信号
lsim(sys,u,t,0); %绘制单位加速度响应曲线
title('单位加速度响应'); %添加曲线标题
xlabel('t');ylabel('c(t)'); %添加坐标轴标注
grid %添加栅格
单位加速度响应曲线如下图所示:
- 8 -
武汉理工大学《自动控制原理》课程设计说明书
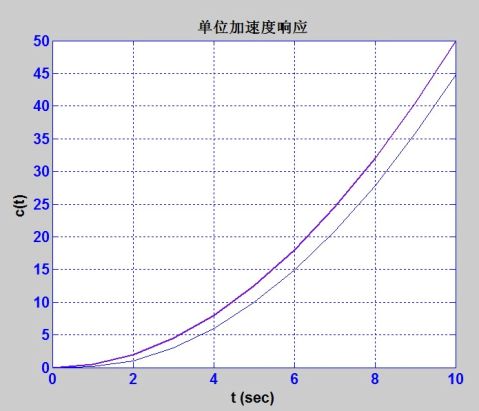
图3 单位加速度响应曲线
4.2系统性能分析
由系统的开环传递函数可知,υ=1,该系统为Ⅰ型系统,其静态位置误差系数为:
15sKa=limsGp(s)=lim2=0 s→0s→0s+4s+82
故系统在单位加速度信号输入作用下的稳态误差为:
1ess(∞)==∞ Ka
5系统根轨迹
根轨迹表示K值从0变到无穷时,闭环系统特征方程式的根在s平面上变化的轨迹。根轨迹与系统性能之间有着密切的关系。当a=1,b=4时,系统开环传
- 9 -
武汉理工大学《自动控制原理》课程设计说明书
递函数为:
Gp(s)=K(s+4) 2s(s+4s+8)(s+1)
MATLAB提供有专门绘制根轨迹的函数rlocus(),该函数是针对开环传递函数的,因此可以直接用rlocus(Gp)绘制出系统的根轨迹。程序如下:
num=[1 4]; %开环零点
den=conv([1 0],conv([1 4 8],[1 1])); %开环极点
Gp=tf(num,den); %建立开环传递函数
rlocus(GP); %绘制根轨迹
title('根轨迹'); %添加标题
xlabel(‘实轴’); ylabel(‘虚轴’); %添加坐轴标注
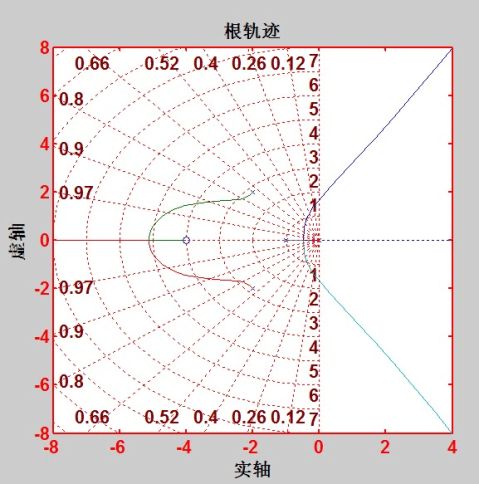
图4 根轨迹图
- 10 -
武汉理工大学《自动控制原理》课程设计说明书
由系统根轨迹图分析可以很方便的系统性能。例如,根轨迹与虚轴交点处显示根轨迹增益的临界值为6.64,由于是单位反馈系统,故根轨迹增益就等于开环增益,即当0<K<6.64时,根轨迹在s平面的左半平面,系统闭环稳定;而当K>6.64时,根轨迹在s平面的右半平面,系统不稳定。另外从根轨迹在s平面原点处有一个极点可知υ=1,即该系统为Ⅰ型系统。
6心得体会
对于高阶系统的时域分析,运用经典解析方法,采用拉普拉斯反变换求解瞬态响应时域表达式比较复杂,要计算出各项动态性能指标也很困难。但对于许多高阶系统,利用主导极点法可以简化系统的分析和性能指标的估算。而利用MATLAB软件可以方便地对高阶系统时域响应进行准确分析。
通过本次课程设计,加深了对所学自动控制原理课程知识的理解,特别是系统稳定性分析,系统各项动态性能指标,稳态误差以及系统根轨迹等相关知识的理解。设计时借助MATLAB软件进行控制系统分析,进一步熟悉了MATLAB语言及其应用,例如MATLAB中部分分式展开函数residue(),计算单位阶跃响应函数step(),计算任意输入响应函数lism(),二维绘图函数plot(),根轨迹绘制函数rlocus()等等。书写课程设计说明书时使用WORD软件,使我掌握了许多WORD编辑和排版技巧。
在此次课程设计中,我觉得查阅各类书籍是很重要的,通过查阅图书馆的书籍可以开拓我们的视野,使我们的思维不仅仅局限在一个很小的圈子里,对同一个问题有多种分析思路、解决方法。另外,我认为光靠自己一个人的力量是远远不够的,当自己遇到问题实在解决不了时,可以和同学共同探讨,寻找解决办法。正所谓“三人行,则必有我师”。
总之,这次课程设计不仅增加了我的知识积累,为将来的毕业设计打下了基础,还让我懂得自主学习的重要性,还有做什么事情都要有恒心,有信心,动脑子去想,就一定有所收获。
- 11 -
武汉理工大学《自动控制原理》课程设计说明书
参考文献
【1】薛定宇. 控制系统计算机辅助设计. 北京:清华大学出版社,2006
【2】胡寿松. 自动控制原理(第五版). 北京:科学出版社,2007
【3】李道根. 自动控制原理. 哈尔滨:哈尔滨工业大学出版社,2007
【4】吴晓燕,张双选. MATLAB在自动控制中的应用. 西安:西安电子科技大
学出版社,2006
【5】王正林,王胜开等. MATLAB/Simulink与控制系统仿真(第2版). 北京:电
子工业出版社,2008
- 12 -