一. 绪论. 1
二.原系统的描述与分析. 1
2.1原系统的单位阶跃曲线. 2
2.2原系统的Bode图. 2
2.3原系统的Nyquist曲线. 2
2.4 原系统的根轨迹. 2
三.校正装置设计. 2
3.1校正装置参数的确定. 2
3.2校正装置Bode图. 3
四. 校正后系统的分析. 3
4.1校正后系统的单位阶跃响应曲线. 3
4.2校正后系统的Bode图. 3
4.3校正后系统的Nyquist曲线. 3
4.4校正后系统的根轨迹. 3
五.总结. 3
六. 参考文献. 4
七. 附图. 4
八.程序. 12
一. 绪论
在现代信息社会,自动控制技术已经应用于各个领域,成为人们生活和工作中不可或缺的部分,自动控制的理论也成为现代人必备的基本知识。自动控制原理是应用基础科学,讲述自动控制中的基本理论以及分析和设计控制系统的基本方法,是研究自动控制共同规律的科学技术。
设计系统前期,当被控对象给定后,按照被控对象的工作条件以及被控信号应具有的最大速度和加速度要求等,可以初步选定执行元件的形式、特征及参数等,可以根据测量精度、物理条件及非线性化等因素选择合适的测量变送元件和信号放大器。最后是精确组合各构成控制器的元件和被控对象,使之满足表征控制精度,阻尼程度和响应速度的指标要求。
校正方法主要有串联正、反馈校正、复合校正和顺馈校正四种。当系统截止频率和稳定裕度均低于指标要求时,可采用串联超前校正。串联校正可以加快系统的反应速度。但同时也削弱了系统抗干扰的能力。因此,当系统输入信号中夹杂着较强的干扰时,对系统带宽的选择就不能仅是从提高快速响应方面来考虑,还必须兼顾到系统抑制干扰的能力。
二.原系统的描述与分析
单位反馈系统的开环传递函数为:
G(s)=
要求系统的速度误差系数为 ,相角裕度
,相角裕度 ,是设计串联超前校正装置。
,是设计串联超前校正装置。
根据题目要求, ,求的K=25。
,求的K=25。
由此得出开环传函为:
闭环传函为:
2.1原系统的单位阶跃曲线
应用Matlab绘制出闭环系统阶跃曲线见附图图1
在图中点击鼠标右键可得峰值时间为0.641s,超调量为78.9%,调节时间为10.2s,上升时间为0.219s,当时间T趋于无穷时,系统输出量趋于稳定最后达到稳定状态。
2.2原系统的Bode图
应用Maltab绘制出开环系统的Bode图,见附图图2
由图可看出,开环系统由三个基本环节构成,分别为比例环节:25;积分环节:1/s;惯性环节:1/(s+1),1/(0.01s+1)。并从图中读出截止频率 ,穿越频率
,穿越频率 ,相角域度
,相角域度 ,幅值域度h=12.1.由公式计算
,幅值域度h=12.1.由公式计算
 ,
, 和
和 ,
,

然而二阶系统的幅值裕度为无穷,相角裕度不满足要求 ,考虑串联超前校正装置。
,考虑串联超前校正装置。
2.3原系统的Nyquist曲线
应用MATLAB绘制出校正前本系统的奈奎斯特曲线见附图图3。从图中可以看出半闭合曲线绕(-1,j0)点的圈数R以及闭环极点数,根据奈奎斯特稳定判据,R=2/P=0,由此系统稳定。
2.4 原系统的根轨迹
应用MATLAB绘制出校正前本系统的根轨迹见附图图4。分离点在(—0.5,0).
三.校正装置设计
串联校正装置分为有源和无源两种,无源串联校正系统通常有RC无缘网络构成,结构简单,成本低廉,但常常需要附加放大器,以补偿其幅值衰减,并进行阻抗匹配,无源校正网络分为无源超前网络和无源滞后网络,其中无源超前网络如下图:
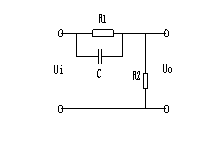

若果输入信号源的内阻为0,且输出端的负载阻抗无穷大,超前网络的传函可以写为 。
。
3.1校正装置参数的确定
根据橡胶裕度的要求,确定校正装置的相位超前角。
 ,其中
,其中 为给定相角相角裕度45度,
为给定相角相角裕度45度, 为校正前相角裕度8.59度,这里
为校正前相角裕度8.59度,这里 取10度。求得
取10度。求得 46.41度
46.41度
根据 ,求得
,求得
由 ,求得
,求得
 ,由
,由 ,求得T=,0.051
,求得T=,0.051
所以
此时校正之后的开环传函为
3.2校正装置Bode图
应用MATLAB绘制出校正装置的Bode图见附图图5
四. 校正后系统的分析
有校正前系统的传函
超前网络的传函
校正后的传函
4.1校正后系统的单位阶跃响应曲线
应用MATLAB绘制出校正后本系统的阶跃响应曲线见附图图6。由图,峰值时间为0.366s,超调量为24.4%,上升时间为0.142s,调整时间为0.781s,显然与原系统相比反应速度较快,超调量较小。可见校正后系统的稳态性能和动态性能得到了改善。
4.2校正后系统的Bode图
应用MATLAB绘制出校正后本系统的伯德图见附图图7。已校正系统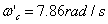 ,算的已校正系统的
,算的已校正系统的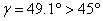 ,幅值裕度仍为正无穷,满足设计要求。
,幅值裕度仍为正无穷,满足设计要求。
4.3校正后系统的Nyquist曲线
应用MATLAB绘制出校正后本系统的奈奎斯特曲线见附图图8。从图中可以看出半闭合曲线绕(-1,j0)点的圈数R以及闭环极点数,根据奈奎斯特稳定判据,R=P/2=0,由此校正后系统稳定。
4.4校正后系统的根轨迹
应用MATLAB绘制出校正后本系统的根轨迹如附图图9。加入校正后,根轨迹有一个闭环零点,和原系统相比较,峰值时间提前,相当于减小闭环系统的阻尼,系统更稳定。
五.总结
系统经过串联超前校正后,相角裕度增加,提高了系统的控制精度,同时改变了系统的动态性能。增加了闭环频带宽度,从而暂态响应加速。同时低频段对正弦输入的稳态误差性能没有下降。从根轨迹角度看,校正就是设计校正装置给原油部分引入必要的零极点,来改变根轨迹曲线,最终获得理想的性能指标。
六. 参考文献
【1】胡寿松主编.2001.自动控制原理【M】.北京:科学出版社
【2】龚威主编.2009.11.自动控制原理【M】.天津:天津大学出版社
七 附图
图1.Matlab绘制出闭环系统阶跃曲线
图2.Maltab绘制出开环系统的Bode图
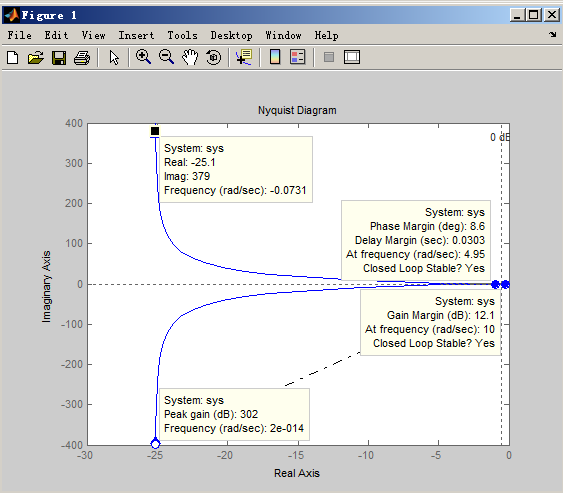
图3.MATLAB绘制出校正前的奈奎斯特曲线
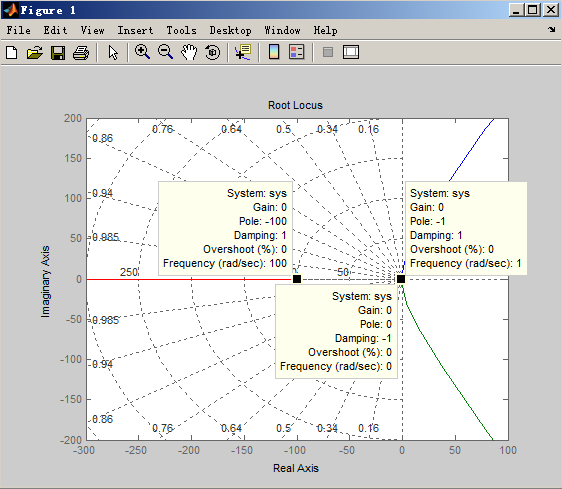
图4. MATLAB绘制出校正前的根轨迹
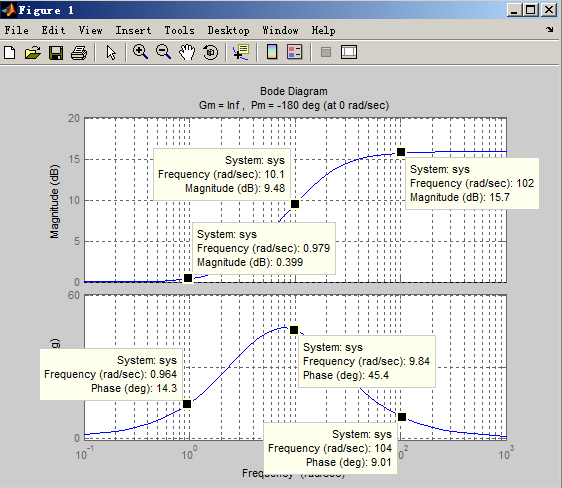
图5.MATLAB绘制出校正装置的Bode图
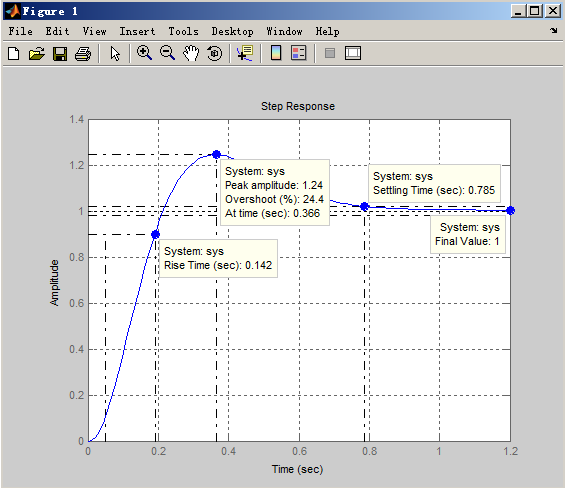
图6.MATLAB绘制出校正后的阶跃响应曲线
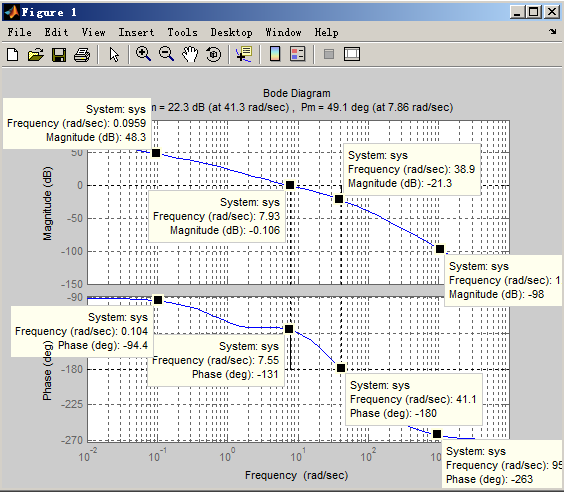
图7.MATLAB绘制出校正后的伯德图
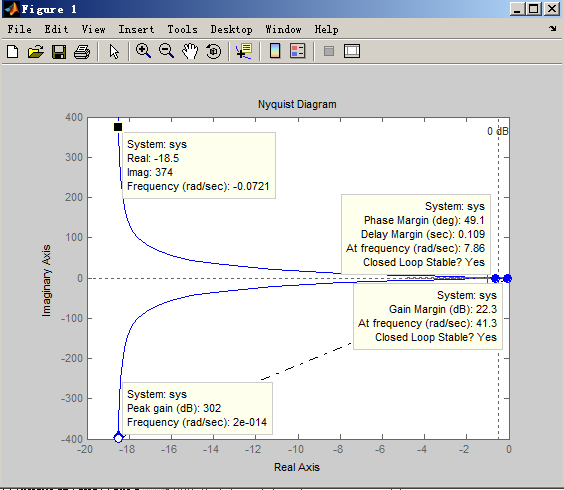
图8.MATLAB绘制出校正后奈奎斯特曲线
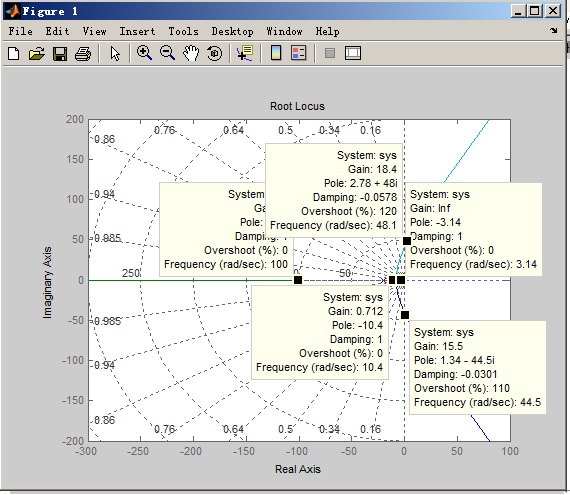
图9.MATLAB绘制出校正后根轨迹
八.程序
程序一:
sys=tf([25],[0.01 1.01 1 25]);
figure(1);
step(sys);
grip:
程序二:
sys=tf(25,[0.01 1.01 1 0]);
margin(sys);
grip;
程序三:
sys=tf(25,[0.01 1.01 1 0]);
nyquist(sys);
grip;
程序四:
sys=tf(25,[0.01 1.01 1 0]);
rlocus(sys);
grip;
程序五:
sys=tf([0.318 1],[0.051 1]);
margin(sys);
grip:
程序六:
sys=tf([7.95 25],[0.00051 0.06151 1.061 8.95 25]);
step(sys);
grip:
程序七:
sys=tf([7.95 25],[0.00051 0.06151 1.061 1 0]);
margin(sys);
grid;
程序八:
sys=tf([7.95 25],[0.00051 0.06151 1.061 1 0]);
nyquist(sys);
grid;
程序九:
sys=tf([7.95 25],[0.00051 0.06151 1.061 1 0]);
rlocus (sys);
grid;
第二篇:自动化系自控课设规范
电气工程及其自动化系 自动控制原理课程设计
说明书规范(学生用)
1、说明书基本格式
说明书规定所有文字内容为打印稿,各曲线和轨迹用MATLAB软件绘制。
2、说明书结构及要求
(1)封面
包括:题目、系别、班级、完成日期、成绩及指导教师(签字)、学生姓名等项。
(2)目录
要求层次清晰,给出标题及页次。
打印时各章题序及标题用小4号黑体, 其余用小4号宋体。行间距为固定值18磅,段前段后0行。
(3)正文
正文应按照目录所确定的顺序依次撰写,内容主要包括:绪论(主要阐述超前或滞后校正的优缺点和适用范围);原系统的分析(绘制设计任务书中所要求的各个曲线和轨迹并对其进行简要的分析);校正环节的确定(计算校正环节的参数,写出计算步骤);校正后系统的分析(绘制校正后系统的各个曲线和轨迹,并与校正前的系统进行比较,分析其性能的变化)。要求计算准确,论述清楚、简练、通顺,插图清晰整洁。文中图、标及公式应规范地绘制和书写。
(4)参考文献
中外文参考文献按下述顺序和格式书写:
[1]申晋,朱维申等.三峡永久船闸高边坡岩体裂隙分布的分形研究.岩土力学学报,1998,20(5):35—39
[2]毛昶熙,周名德等.闸坝工程水力学与设计管理.北京:水利电力出版社,1995:8—9
英文参考文献及期刊杂志
[3]Tanzi,Vito.Theory and policy:A comment on Dixie and on current tax theory.International Monetary and Fund Staff Paper (IMF), Vol.39, No.4, 1992: 957-966
著作按下述格式书写:
[4]Rudiger Dorbusch.Policy making in the Open Economy.Oxford University Press Inc., 1993: 149
3、装订要求
(1)沿左侧装订;
(2)装订顺序:封面、任务书、目录、正文、参考文献。