 课程设计任务书
课程设计任务书
学生姓名: 专业班级:
指导教师: 工作单位:
题 目: 二阶系统综合分析与设计
初始条件:某单位反馈系统结构图如图1所示:
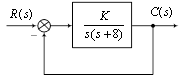
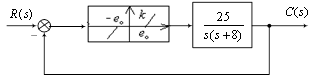
图1 图2
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)
1、 绘制根轨迹
2、 K=25(下同),试求 ,开环增益,上升时间,峰值时间,调节时间,超调量
,开环增益,上升时间,峰值时间,调节时间,超调量
3、 分别求取位置误差系数、速度误差系数、加速度误差系数及输入信号为单位阶跃信号、斜坡信号及单位加速度信号时的稳态误差
4、 用Matlab绘制单位阶跃相应曲线
5、 绘制Bode图和Nyquist曲线,求取幅值裕度和相角裕度
6、 如在比较点与开环传递函数之间加1个死区非线性环节,如图2所示,其中 ,试选取合适变量绘制系统的相轨迹,并判断系统的稳定性
,试选取合适变量绘制系统的相轨迹,并判断系统的稳定性
7、 认真撰写课程设计报告。
时间安排:

指导教师签名: 年 月 日
系主任(或责任教师)签名: 年 月 日
目录
引言...........................................3
1 设计意义及要求......................................4
1.1 设计意义......................................4
1.2 设计要求......................................4
2 设计过程............................................5
2.1 绘制根轨迹....................................5
2.1.1理论计算.................................5
2.1.2用MATLAB绘制............................5
2.2 系统的动态性能指标............................6
2.3 各种系统误差..................................7
2.4用MATLAB绘制单位阶跃曲线......................8
2.5绘制Bode图和Nyquist曲线.....................9
2.5.1理论计算....................................9
2.5.2用MATLAB绘制曲线..............................9
2.5.3绘制Bode图.....................................11
2.6加入死区非线性环节............................11
结束语 ...............................................15
参考文献 .............................................15
本科生课程设计成绩评定表.............................16
引言
随着科学技术的不断发展,人类社会也在不断进步。自动化技术已经取得了很大的进步。自动控制技术已广泛应用于制造业、农业、交通、航空及航天等众多产业部门,极大地提高了社会劳动生产率,改善了人们的劳动条件,丰富和提高了人们的生活水平。在今天的社会中,自动化装置无所不在,为人类文明作出重要贡献。20世纪90年代,实现了万米深海探测;通信和金融行业已接近全面自动化。自动化技术应用无所不在,自动化装置应用广泛,因此,我们有必要对一些典型、常用的系统了解、分析、掌握。
一个典型的控制系统,往往都是很复杂的。自动控制系统是指能够对被控对象的工作状态进行自动控制的系统。自动控制系统用于不同的领域和目的,对系统的控制性能要求不一样,如对恒值控制,要求系统尽快使被控量以一定精度恒定在给定值;对于随动控制,要求系统是输出能够准确、快速地跟随给定值的变化。但是,从系统的运动过程来讲,却有相同的基本要求,可以归结为稳定性、快速性和准确性,即稳、准、快的要求。可以通过反馈装置、校正装置等来控制。
1.设计意义及要求
1.1设计意义
自动控制理论是研究自动控制共同规律的科学技术。它的发展初期,是以反馈理论为基础的自动调节原理,主要用于工业控制。20世纪60年代,自动控制理论已经跨入了一个新阶段——现代控制理论。它主要研究具有高性能、高精度的多变量变参数系统的最优化问题,主要采用的方法是以状态为基础的状态空间法。目前,自动控制理论还在继续发展,正向以控制论、信息论、仿生学为基础的智能控制理论深入。此次课程设计,不禁让我更好的掌握自动控制原理,并且更好的掌握了MATLAB的用法,学会了应用软件来对实际问题进行仿真。
1.2设计要求
题 目: 二阶系统综合分析与设计
初始条件:某单位反馈系统结构图如图1所示:
图1 图2
要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)
1、 绘制根轨迹
2、 K=25(下同),试求,开环增益,上升时间,峰值时间,调节时间,超调量
3、 分别求取位置误差系数、速度误差系数、加速度误差系数及输入信号为单位阶跃信号、斜坡信号及单位加速度信号时的稳态误差
4、 用Matlab绘制单位阶跃相应曲线
5、 绘制Bode图和Nyquist曲线,求取幅值裕度和相角裕度
6、 如在比较点与开环传递函数之间加1个死区非线性环节,如图2所示,其中,试选取合适变量绘制系统的相轨迹,并判断系统的稳定性
7、认真撰写课程设计报告
2.设计过程
2.1绘制根轨迹
某单位反馈系统结构图如图1所示:
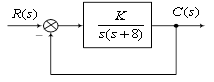

图1 图2
2.1.1 理论计算
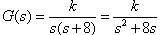 开环传递函数为:
开环传递函数为:
解析:系统有两个开怀极点:(0,+j0)、(-8,+j0),没有零点。
(1)根轨迹的渐近线计算:

k=0,1

和
(2)分离点坐标的计算:

解方程得 d=-4
取分离点为d=-4。
(3)与虚轴的交点:
闭环传递函数为:

令劳斯表中 行的行首项为0,则k=0,根据
行的行首项为0,则k=0,根据 行系数,可得到如下辅助方程:
行系数,可得到如下辅助方程:
 带入k=0,则得
带入k=0,则得 。
。
根据根轨迹的绘制原则,可以绘制出根轨迹。
2.1.2用MATLAB绘制
程序:num=[1];
den=[1 8 0];
g=tf(num,den)
rlocus(num,den)
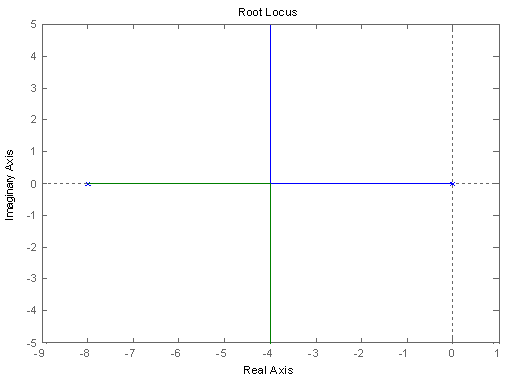 图1 根轨迹示意图
图1 根轨迹示意图
根据理论计算和MATLAB绘制的根轨迹示意图,可知由理论计算所得到的根轨迹的图形与用MATLAB所绘制的一样,说明所绘制的根轨迹是正确的。
2.2 系统的动态性能分析
K=25(下同),试求,开环增益,上升时间,峰值时间,调节时间,超调量
由图得,闭环系统的传递函数为:


 的求取:
的求取:


 的求取:
的求取:
1)开环增益:k=25
2)上升时间: (
(

 )
)
3)峰值时间:
4)调节时间:
5)超调量:

2.3各种系统误差量的计算
分别求取位置误差系数、速度误差系数、加速度误差系数及输入信号为单位阶跃信号、斜坡信号及单位加速度信号时的稳态误差:
开环系统的传递函数为:
由开环传递函数易知,该系统为I型系统。
1)位置误差系数:
2)速度误差系数:
3)加速度误差系数:
4)输入信号为单位节约信号时的稳态误差:
5)输入信号为斜坡信号时的稳态误差:
6)输入信号为单位加速度信号时的稳态误差:
2.4用MATLAB绘制单位阶跃响应曲线
程序:num=[25];
den=[1 8 25];
 G=tf(num,den);
G=tf(num,den);
step(G);
图2 单位阶跃曲线示意图
2.5绘制Bode图和Nyquist曲线
2.5.1 理论计算
开环传递函数为:
1)相角裕度:先求截止频率
因为在穿越点处, ;所以
;所以 ,从而可求得
,从而可求得  ,即
,即 ;
;
截止频率处的相角为:
相角裕度 :
:
2)幅值裕度:先求相角穿越角

即为: ,
,
所以幅值裕度 。
。
2.5.2用MATLAB绘制曲线
1. 用MATLAB绘制Bode图
程序:num=[25];
den=[1 8 0];
bode(num,den);
margin(num,den);
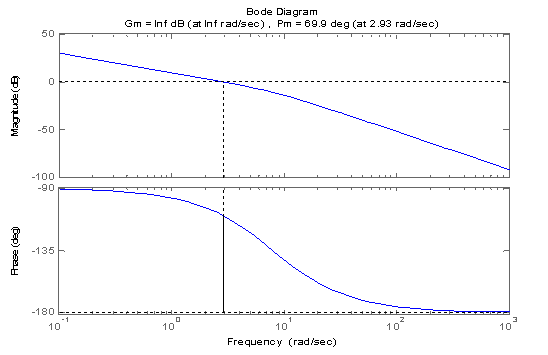 图3 Bode图
图3 Bode图
由Bode图可知系统的相角裕度为 ,幅值裕度为
,幅值裕度为 ,而理论计算系统的相角裕度为
,而理论计算系统的相角裕度为 ,幅值裕度为,虽然两种计算的结果存在着一定的差异,但是二者差异在误差允许的范围内。
,幅值裕度为,虽然两种计算的结果存在着一定的差异,但是二者差异在误差允许的范围内。
2. 用MATLAB绘制Nyquist曲线
程序:num=[25];den=[1 8 0];
 Nyquist(num,den);
Nyquist(num,den);
图4 Nyquist曲线
2.5.3绘制Bode图
开环传递函数为:
1)可以看出传递函数是一个1型系统,有一个积分环节和一个惯性环节
2)通过计算可以得的Wc=2.9339 rad/s
3)绘制低频段,先过横轴上的点k=Wc=57.3处做一条斜率为的直线则w1=8之前
的为低频段
4)再在Wc=8(转折频率)将曲线斜率降-20db,变为-40db;
5)相频特性是积分环节,惯性环节相频特性的叠加。先画出各自的相频图再在特殊点处叠加即可
进而可以得到Bode图。
2.6加入死区非线性环节
如在比较点与开环传递函数之间加1个死区非线性环节,如图2所示,其中,试选取合适变量绘制系统的相轨迹,并判断系统的稳定性:
1.应用描述函数法来求解。
死区非线性环节的描述函数为:

将已知数据带入上式得:

在复平面内分别绘制线性环节的 曲线和负倒描述曲线-1/N(A)曲线,由于
曲线和负倒描述曲线-1/N(A)曲线,由于 为线性环节
为线性环节 
非线性系统的稳定性判据为:若曲线不包围 曲线,则非线性系统稳定;若曲线包围曲线,则系统不稳定。
曲线,则非线性系统稳定;若曲线包围曲线,则系统不稳定。
绘制曲线和曲线:
MATLAB程序:
G=tf([25],[1 8 0]);
nyquist(G);
hold on;
A=-100:0.01:-1.01;
y=-1./(3.14./2-asin(1./A).*3.14./180-1./A.*sqrt(1-(1./A).^2));
y=plot(A,y);
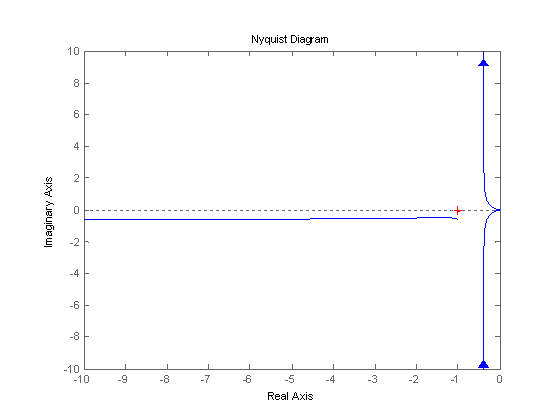
图5 系统曲线和-1/N(A)曲线
由图知曲线不包围-1/N(A)曲线。根据非线性稳定性判据,该非线性系统是稳定的。
2.应用相平面法求解。
绘制系统的相轨迹。
MATLAB程序:
Command中的程序:
t=0:0.01:30;
c0=[-1 0]';
[t,c]=ode45('fun',t,c0);
figure(1)
plot(c(:,1),c(:,2));grid;
xlabel('t(s)');ylabel('c(t)')
定义fun.m文件中的程序:
function dc=fun(t,c)
dc1=c(2);
if (c(1)<-1)
dc2=-8*c(2)-25*c(1)-25;
elseif(abs(c(1)<1))
dc2=-8*c(2)-25*c(1);
else dc(2)=-8*c(2)-25*c(1)+25;
end
dc=[dc1 dc2]';
 图6 系统相轨迹
图6 系统相轨迹
结 束 语
本次课程设计是运用MATLAB来求解自动控制系统,通过学习,我们很容易发现运用MATLAB这款软件的优越性,它运用很广泛,如数学和计算算术发展模型;模拟仿真和原型;数据分析,开发和可视化;科学和工程图形;应用发展包括图形用户界面设计等方面。
MATLAB软件功能之强大,应用之广泛,已成为21世纪最为重要的科学计算语言,可见学习掌握这一工具的重要性。在今后的学习中,我们会慢慢体会到它的强大功能。所以,我们还得加强对这款软件的学习,为以后学习专业知识打下基础。
这几天的学习,让我体会到不管学习什么,我们都要勇于探索,不能遇到困难就退缩,要勤于思考,遇到不懂的问题,先要自己多开动脑筋,不要一遇到困难就请教别人,要注意培养自己的能力,在自己思考仍无法解决后,再去请教。我们在探索的过程中,培养了我们独立思考问题的能力。同时,还可以提高我们的自学能力以及动手实践能力。我们大学生要注重多培养自己的能力,为以后走上工作岗位打下基础,在以后的工作中,很多东西都是通过我们自学得来的,我们可以自己查阅资料,不断探索,自己动手实践,作为我们自动化专业的学生,没有动手能力是不行的,平时我们学的都是一些课本上的理论知识,自己动手的机会很少,而这次的训练正好给了我们一次锻炼的机会。让自己能够亲身实践,运用MATLAB编程对自动控制系统进行仿真,那种收获的快乐是无以言表的。同时,这次课程设计也让我认识到自己理论知识的不扎实,在以后的学习中,更要端正学习态度,努力学习,只有这样才能更好的、真正地掌握所学的知识。
参 考 文 献
[1] 胡寿松.自动控制原理(第四版),科学出版社
[2]陈哲.现代控制理论基础。北京:冶金工业出版社
[3]薛定宇。反馈控制系统设计与分析——MATLAB语言应用,清华大学出版社
[4]李红星.自动控制原理,电子工业出版社
本科生课程设计成绩评定表
指导教师签字:
年 月 日