实验八 声速的测定
声波是一种在弹性媒质中传播的机械波。声速是描述声波在媒质中传播特性的一个基本物理量,它的测量方法可分为两类;第一类方法是根据关系式V=L/t,测出传播距离L和所需时间t后,即可算出声速V;第二类方法是利用关系式V=fλ,从测量其频率f和波长λ来算出声速V。本实验所采用的共振干涉法和相位比较法属于后者,时差法则属于前者。
由于超声波具有波长短、易于定向发射及抗干扰等优点,所以在超声波段进行声速测量是比较方便的。通常利用压电陶瓷换能器来进行超声波的发射和接收。
【实验目的】
1.学会用驻波共振法和位相比较法测定超声波在空气中的传播速度。
2.进一步学习使用示波器和信号发生器。
3.加强对驻波及振动合成等理论的理解。
【实验原理】
1.超声波与压电陶瓷换能器
频率20Hz-20kHz的机械振动在弹性介质中传播形成声波,高于20kHz称为超声波,超声波的传播速度就是声波的传播速度,而超声波具有波长短,易于定向发射等优点。声速实验所采用的声波频率一般都在20~60kHz之间,在此频率范围内,采用压电陶瓷换能器作为声波的发射器、接收器效果最佳。
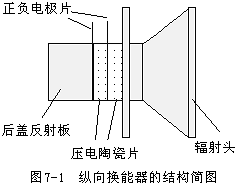
压电陶瓷换能器根据它的工作方式,分为纵向(振动)换能器、径向(振动)换能器及弯曲振动换能器。声速教学实验中所用的大多数采用纵向换能器。图7-1为纵向换能器的结构简图。
2.驻波共振法测定声速
假设在无限声场中,仅有一个点声源S1(发射换能器)和一个接收平面(接收换能器S2)。当点声源发出声波后,在此声场中只有一个反射面(即接收换能器平面),并且只产生一次反射。
在上述假设条件下,发射波 。在S2处产生反射,反射波
。在S2处产生反射,反射波 ,信号相位与ξ1相反,幅度A2<A1。ξ1与ξ2在反射平面相交叠加,合成波束ξ3
,信号相位与ξ1相反,幅度A2<A1。ξ1与ξ2在反射平面相交叠加,合成波束ξ3



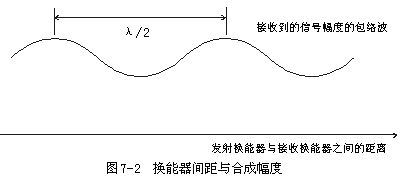
由此可见,合成后的波束ξ3在幅度上,具有随cos(2πx/λ)呈周期变化的特性,在相位上,具有随 呈周期变化的特性。另外,由于反射波幅度小于发射波,合成波的幅度即使在波节处也不为0,而是按
呈周期变化的特性。另外,由于反射波幅度小于发射波,合成波的幅度即使在波节处也不为0,而是按 变化。图4所示波形显示了叠加后的声波幅度,随距离按
变化。图4所示波形显示了叠加后的声波幅度,随距离按 变化的特征。
变化的特征。
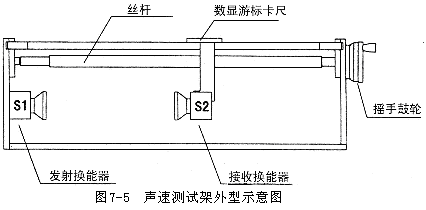
实验装置按图7-5所示,图中S1和S2为压电陶瓷换能器。S1作为声波发射器,它由信号源供给频率为数十千赫的交流电信号,由逆压电效应发出一平面超声波;而S2则作为声波的接收器,压电效应将接收到的声压转换成电信号。将它输入示波器,我们就可看到一组由声压信号产生的正弦波形。由于S2在接收声波的同时还能反射一部分超声波,接收的声波、发射的声波振幅虽有差异,但二者周期相同且在同一线上沿相反方向传播,二者在S1和S2区域内产生了波的干涉,形成驻波。我们在示波器上观察到的实际上是这两个相干波合成后在声波接收器S2处的振动情况。移动S2位置(即改变S1和S2之间的距离),从示波器显示上会发现,当S2在某此位置时振幅有最大值。根据波的干涉理论可以知道:任何二相邻的振幅最大值的位置之间(或二相邻的振幅最小值的位置之间)的距离均为λ/ 2。为了测量声波的波长,可以在一边观察示波器上声压振幅值的同时,缓慢的改变S1和S2之间的距离。示波器上就可以看到声振动幅值不断地由最大变到最小再变到最大,二相邻的振幅最大之间的距离为λ/2;S2移动过的距离亦为λ/2。超声换能器S2至S1之间的距离的改变可通过转动鼓轮来实现,而超声波的频率又可由声速测试仪信号源频率显示窗口直接读出。
在连续多次测量相隔半波长的S2的位置变化及声波频率f以后,我们可运用测量数据计算出声速,用逐差法处理测量的数据。
综合上述,由驻波共振理论及测量系统的边界条件可知,当接收器S2与发射器S1间距发生改变时,测量系统将建立一系列的驻波共振态,且对于每两个相邻的共振态,接收器S2与发射器S1间距的改变量为 。
。
本实验所采用的驻波共振法测量声速,应用了压电转换技术,将不易观测的声信号,转换为由示波器观测的电信号。在该方法中,通过逐次逼近判断极大值的位置来确定波长。
3. 相位比较法测定声速
由前述可知入射波ξ1与反射波ξ2叠加,形成波束:

相对于发射波束:来说,在经过△x距离后,接收到的余弦波与原来位置处的相位差(相移)为θ= 2π △x /λ。由此可见,在经过△x距离后,接收到的余弦波与原来位置处的相位差(相移)为θ= 2π △x /λ,如图7-3所示。因此能通过示波器,用李萨茹图法观察测出声波的波长。
综合上述,在波传播的方向上,任意两点间都存在有相位差,接收器S2与发射器S1间也存在有相位差,当接收器S2与发射器S1间距发生改变时,它们的相位差也随着改变,且有固定的关系,如当接收器S2与发射器S1间距改变一个波长 时,它们的相位差改变
时,它们的相位差改变 。
。
本实验所采用的相位比较法测量声速,应用了压电转换技术,将不易观测的声信号,转换为由示波器观测的电信号。在该方法中,通过观测李萨茹图形,判断接收器S2与发射器S1的相位差满足的位置来确定波长。
【实验仪器介绍】
声速测定仪为观察、研究声波在不同介质中传播现象,测量这些介质中声波传播速度的专用仪器。
1.声速测定仪
2.仪器配套性
表7-1 超声速测量实验仪器配套性表

【实验内容】
1.驻波共振法测量声速。
2.相位比较法测量声速。
【实验步骤及其要求】
1.实验仪器连接及其调整

(1).按上述图连接仪器设备(驻波法连接)
(2).仪器调节:信号发生器:选正弦波(频率先调为 左右)
左右)
示 波 器:驻波共振法:实现非X-Y状态的操作
相位比较法:实 现X-Y状态的操作
声速测量仪:使S1和S2靠近,并留有一定间隙。
(3).确定振动系统的共振频率(压电陶瓷谐振频率 )。将信号源输出频率调至附近,缓慢移动S2,可在示波器上显示正弦波形的变化情况,当移到出现第一次振幅较大处时,固定S2位置,再仔细调节信号源频率,使示波器所显正弦波形振幅达到最大,此时信号源所显频率值即为振动系统的共振频率f值。
)。将信号源输出频率调至附近,缓慢移动S2,可在示波器上显示正弦波形的变化情况,当移到出现第一次振幅较大处时,固定S2位置,再仔细调节信号源频率,使示波器所显正弦波形振幅达到最大,此时信号源所显频率值即为振动系统的共振频率f值。
2.驻波共振法测量声速
实验仪器连接(示波器实现非X-Y状态)。
(1).在共振频率条件下,缓慢移动S2,当示波器显示屏上正弦波形振幅出现最大时,记录S2对应的位置坐标 。
。
(2).依次继续缓慢移动S2,记录各次波形振幅出现最大时的S2对应的位置坐标 ,要求记录12组数据。
,要求记录12组数据。
(3).记录共振频率f值和室温t值。
驻波法测量声速实验数据记录表 (f= KHZ 介质温度t= ℃)

3.相位比较法测量声速
(1).实验装置连接进行微调(示波器实现X-Y状态)。
(2).在上述共振频率条件下,使S2靠近S1,二者间并留有一定间隙,此时示波器显示屏上显示适当的李萨茹图形。
(3).缓慢移动S2,当示波器显示屏上出现一条 的斜线形李萨茹图形时,记录此时S2对应的位置坐标,依次继续缓慢移动S2,每次得到相同的的斜线形李萨茹图形时,记录S2对应的位置坐标,要求记录12组数据。
的斜线形李萨茹图形时,记录此时S2对应的位置坐标,依次继续缓慢移动S2,每次得到相同的的斜线形李萨茹图形时,记录S2对应的位置坐标,要求记录12组数据。
(4).记录室温t值。
相位法测量声速实验数据记录表 ( f= KHZ 介质温度t= ℃)

完成实验后应关闭各仪器的电源。
【数据处理】
1.用逐差法处理实验数据并计算空气介质中共振干涉法和相位法测得的声波波长平均值 。
。
2.按理论值公式 ,算出理论值VS。
,算出理论值VS。
式中V0=331.45m/s为T0=273.15K时的声速,T=(t+273.15)K。
或按经验公式V=(331.45+0.59t)m/s,计算V。t为介质温度(℃)。
3.计算出通过二种方法测量的V以及△V值,其中△V=V-VS。
将实验结果与理论值比较,计算百分误差。分析误差产生的原因。最终给出在室温为t℃时,用驻波共振干涉法和相位比较法测得超声波在空气中的传播速度的结果。
【思考题】
1.声速测量中驻波共振干涉法、相位比较法有何异同?
2.声音在不同介质中传播有何区别?声速为什么会不同?
【参考书目】
[1] 成正维.大学物理实验.北京:高等教育出版社,2002.
[2] 张兆奎等.大学物理实验.北京:高等教育出版社,1993.
附录-1 简析三种测定声速的方法
1.驻波共振法
由测试架上发射换能器发射出的声波经介质传播到接收换能器时,在接收换能器表面(是一个平面)产生反射。此时反射波与入射波在换能器表面叠加,叠加后的波形具有驻波特性。从声波理论可知,当二个声波幅度相同,方向相反进行传播时,在它们的相交处进行声波干涉现象,出现驻波。而声强在波幅处最小,在波节处最大。所以调节接收换能器的位置,通过示波器看到的波形幅度也随位置的变化而出现起伏,因为是靠目测幅度的变化来知道它的波长,所以难以得到很精确的结果。
2.相位比较法
声速在传播途中的各个点的相位是不同的,当发射点与接收点的距离变化时,二者的相位差也变化了。通过示波器用李萨茹图法进行波长的测量。与驻波法相同的是都是目测波形的变化来求它的波长,同样测量结果存在着一定的不确定性。
3.时差法
在实际工程中,时差法测量声速得到广泛的应用。时差法测试声速的基本原理是基于速度V=距离S/时间T,通过在已知的距离内测声波传播的时间;从而计算出声波的传播速度,在一定的距离之间 由控制电路定时发出一个声脉冲波,经过一段距离的传播后到达接收换能器。接收到的信号经放大,滤波后由高精度计时电路求出声波从发出到接收这个在介质传播中经过的时间,从而计算出在某一介质中的传播速度。只因为不用目测的方法,而由仪器本身来计测,所以其测量精度相对于前面两种方法要高。同样在液体中传播时,由于只检测首先到达的声波的时间,而与其它回波无关,这样回波的影响比较小,因此测量的结果较为准确,所以工程中往往采用时差法来测量。
综上所述,通过分析三种测量方法,我们得出了用驻波法和相位法这两种方法测量声速,存在一定的视觉测量误差,建议学生带着比对、加深印象目的使用这三种方法进行测量声速,并对三种方法的优点、缺点进行比较。
第二篇:声速的测量
声速的测量
实验目的:1、 了解超声波的发射和接收方法;
2、加深对振动合成、波动干涉等理论知识的理解;
3、掌握用驻波法和相位法测声速。
实验原理:(见预习报告)
实验仪器:低频信号发生器、示波器、超声声速测定仪、频率计等。
实验内容:1、调整仪器使系统处于最佳工作状态
(1)旋松发射换能器S 固定环上的固紧螺丝,使S的端面与卡尺游标滑动方向垂直后再旋紧,将S
固定环上的固紧螺丝,使S的端面与卡尺游标滑动方向垂直后再旋紧,将S 移近S,旋松S的固紧螺丝,调S,使其端面平行S的端面在旋紧,两端面严格平行。
移近S,旋松S的固紧螺丝,调S,使其端面平行S的端面在旋紧,两端面严格平行。
(2)调整低频信号发生器输出谐振频率
连好仪器后,调整低频信号发生器输出的正弦幅度,同时调整接收端的示波器,使示波器屏幕上有适当的讯号幅度,然后移动游标卡尺寻找讯号幅度最强的位置,找到后,调节信号风生水起的输出频率,使示波器上地 讯号幅度最大,再用微调旋钮微调输出频率,是示波器上有更大的讯号幅度,此时信号发生器输出的频率值即为本系统地 谐振频率。为了精确,可以重复几次。
2、驻波法(共振干涉法)测波长和波速
(1)根据原理图连接好仪器,示波器上接通道1,测量前移动游标,将S从一端缓慢移向另一端,并来回几次,观察示波器上的讯号幅度的变化,了解波的干涉现象。
(2)测量,S与S之间的距离从近到远,选择一个示波器上的讯号幅度最大处(驻波的波腹)为起点(游标的读数为5cm左右即可),记下S的位置,缓慢移动S,依次记下每次讯号幅度最多时S的位置(驻波的波腹)x,x,…,x ,共12个值,见原始数据。
,共12个值,见原始数据。
(3)实验中要记下实验室的温度t(取实验开始时的室温与实验结束时的室温的平均值),见原始数据,我记了结束时的温度,由于温度基本没有变化,所以对结果的影响不会很大,可以忽略。
3、相位比较法测波长
(1)在上面实验仪器的基础上,再在信号发生器输出接线柱上再增加一根导线,接到示波器的X输入,将示波器X扫描旋钮旋至“外接”,将通道1关闭,通道2打开。
(2)调节示波器使屏上出现李萨如图,缓慢的增加S与S之间的距离(即改变两输入波的相位差)。
(3)同样记录之间的距离,选择一个示波器上的李萨如图为直线处为起点,记下S的位置,缓慢移动S,依次记下每次出现与刚开始同样李萨如图时S的位置x,x,…,x ,共10个值,见原始数据。
,共10个值,见原始数据。
实验数据处理(原始数据见数据记录纸):
1、(1)数据的处理使用逐差法;
(2)由公式:v =v
=v
 ,计算得t=24.8
,计算得t=24.8 时的参考声速为:,v=346.17
时的参考声速为:,v=346.17
2、驻波法(共振干涉法)测波长和波速数据处理
(1)波长 :
:
逐差法处理:
 =
= =
= mm= 5.15mm,
mm= 5.15mm, =10.30mm;
=10.30mm;
 =
= =
= mm= 5.13mm,
mm= 5.13mm, =10.26mm;
=10.26mm;
 =
= =
= mm= 5.15mm,
mm= 5.15mm, =10.30mm;
=10.30mm;
 =
= =
= mm= 5.14mm,
mm= 5.14mm, =10.28mm;
=10.28mm;
 =
= =
= mm= 5.15mm,
mm= 5.15mm, =10.30mm;
=10.30mm;
 =
= =
= mm= 5.12mm,
mm= 5.12mm, =10.24mm;
=10.24mm;
所以: =
= =
= mm=10.280mm=1.0280*
mm=10.280mm=1.0280* m;
m;
所以:σ= =0.004mm,故uA =σ/
=0.004mm,故uA =σ/ =0.0015mm,
=0.0015mm,
取P=0.68,则t因子值为t =1.11,
=1.11,
∴A类不确定度为:ΔA =tP?uA =1.11*0.0015mm=0.0016mm
B类不确定度为:uB=ΔB /C=Δ卡/C =0.02/ mm=0.012mm
mm=0.012mm
∴波长的合成不确定度为:U= =0.012mm=1.2*
=0.012mm=1.2* m;
m;
故驻波法(共振干涉法)测得的波长的最终结果为:=(10.280* 0.012*)m,P=0.68。
0.012*)m,P=0.68。
(2)谐振频率 只有B类不确定度,uB=ΔB /C=Δ仪/C=50/3Hz=16.7Hz,所以:U
只有B类不确定度,uB=ΔB /C=Δ仪/C=50/3Hz=16.7Hz,所以:U = uB=16.7Hz。
= uB=16.7Hz。
(3)实验中:=34.46*10 Hz,由V=知:
Hz,由V=知:
v==34460*1.0280*= 354.25;
v的不确定度计算公式为:U =v*
=v* 。
。
所以v的不确定度为:U = 0.45,U
= 0.45,U = 0.90;
= 0.90;
则驻波法(共振干涉法)测得的v的最终结果为:
v=(354.250.45) , P=0.68.
v=(354.250.90) , P=0.95.
(4)与v=346.17做比较: =
= =2.33%。
=2.33%。
(5)结果讨论、分析
由实验实际测得的声速与用理论公式计算所得的声速之间的误差高达2.33%,这次实验的误差有点大了,应该在1%以内才算可以。之所以会出现这样的误差,原因有:
一、信号发生器的频率在不断的变化,虽然实验过程中间不断地调节以便保持其值的不变,但在示波器的屏幕上可以看出,读数有波动,将近100Hz,在加上其它的误差,相乘之后,声速就可能会达到零点几米的误差,也就是大约0.5%这个幅度。但从操作的过程来看,我认为我实验的误差仅仅有部分来源于此。
二、游标卡尺等其它仪器本身的误差;
三、在观察讯号幅度最大处(驻波的波腹)即S的位置时,主观的因素很强,肉眼难以准确判断出真正的最大处,这样的误差是本实验中误差的最重要的来源!即使判断有很小的误差,由于频率为34460Hz左右,相乘的结果更有可能达到几米,我认为这也是我的实验结果的误差的主要来源。
虽然误差比较大,但在一定的范围内,可以说成功地完成了实验,达到了实验目的。
这些也是实验测得的V的不确定度的来源。
也正是如(三)的情况,所以驻波法(共振干涉法)测波长和波速
的误差估计会比用相位比较法测波长和波速大。
3、相位比较法测波长和波速数据处理
(1)波长:
逐差法处理:
 =
= =
= mm= 10.21mm;
mm= 10.21mm;
 =
= =
= mm= 10.26 mm;
mm= 10.26 mm;
 =
= =
= mm= 10.33mm;
mm= 10.33mm;
 =
= =
= mm= 10.30mm;
mm= 10.30mm;
 =
= =
= mm= 9.98mm;
mm= 9.98mm;
所以:= =
= mm=10.22mm=1.022*m;
mm=10.22mm=1.022*m;
所以:σ= =0.15mm,故uA =σ/=0.09mm,
=0.15mm,故uA =σ/=0.09mm,
取P=0.68,则t因子值为t=1.14,
∴A类不确定度为:ΔA =tP?uA =1.14*0.09mm=0.10mm
B类不确定度为:uB=ΔB /C=Δ卡/C =0.02/mm=0.012mm
∴波长的合成不确定度为:U==0.10mm=1.0* m;
m;
相位比较法测得的波长的最终结果为:
=(10.22*0.10*)m,P=0.68。
(2)谐振频率只有B类不确定度,uB=ΔB /C=Δ仪/C=50/3Hz=16.7Hz,所以:U= uB=16.7Hz。
(3)实验中:=34.46*10Hz,由V=知:
v==34460*1.022*= 352.18;
v的不确定度计算公式为:U=v* 。
所以v的不确定度为:U= 3.45,U= 6.90;
则相位比较法测得的v的最终结果为:
v=(354.253.45) , P=0.68.
v=(354.256.90) , P=0.95.
(4)与v=346.17做比较:= =1.74%。
=1.74%。
(5)讨论、分析
一、分析如前面的(一)与(二);
二、主要的误差同样来自主观的观察与判断,不一定保证能准确地观察到李萨如图恰好为直线的位置,所以误差比较大。但是,这个判断的准确性比用驻波法(共振干涉法)测波长和波速高,所以误差稍微偏小。结果证明的确如此。也基本上是成功地完成了实验。
这些也是实验测得的V的不确定度的来源。
实验结果分析:(如前所述)
思考题:1、固定换能器的距离改变频率,以求声速,是否可行?
答:从理论上来说是可以的,操作中也是可以的,因为在我们做实验过程中,我们为了找到谐振频率,就是在换能器的距离不变的情况下找讯号幅度最大处,从过程中我们可以看到频率f变化时,幅度也在变,所以这样子做的话,得记录各个相邻的最大幅度。同时误差会比较大,因为操作复杂,计算公式复杂,最主要的f的值很大,稍有误差就可以使结果的误差很大。
(1)驻波法(共振干涉法)叠加后合成波为:
y = ( 2Acos2pX/l ) cos2p ft
由V=f知Vnf=x,测出相邻的f与最大幅度处(即得n)就可以算出V了。
(2)方法同上,也与本实验的操作差不多。
实验心得:这个实验操作不复杂,比上次好多了!原理也极简单,但数据的处理就比上次复杂的多,因为要计算的东西相当多!除了公式,输入的文字的量也不少!
误差有点大,但自认为还是比较成功的了:自己按要求做了。
思考题看似简单,希望我的回答是正确。
最后还是那句话:
做实验,无论如何都是要认真,细心,耐心的,科学!Good
态度认真,报告也很完整,Very Good