创新设计实验报告
自动雨伞折叠器
班级:装控1101
姓名:**
学号:**
完成日期:20XX年5月4日
一、 实验目的
1. 综合学生的所学知识,培养观察事物的能力,分析和解决问题的能力,动手能力,进而提高创新能力.
2. 培养学生将已学知识运用于实际的观念和能力,如将数学,物理,化学,计算机,工程制图,机械原理,机械设计,人机工学,人文科学,市场学等综合运用于实际的能力.
3. 拓展学生的知识面,培养学生的自学能力,使他们具备需要新知识是便能拥有它的能力.
二、 背景技术
1. 问题的发现
日常生活中雨伞以及太阳伞带给我们便利的同时也产生了不少麻烦,比如说下雨天的时候雨伞会积聚雨水带进我们生活的地方及公共场所,导致路面积水不仅人容易滑倒,而且把地面弄脏,不卫生还给卫生打扫带来困难.用后的雨伞如果不折叠整齐,会导致伞面褶皱不仅影响美观而且会加剧雨伞老化,减少雨伞使用时间。
问题的发现始于有一次去超市,见到超市提供自制长筒型塑料袋来装占满水的雨伞,当时一不小心就戳破了,可是伞上都是水用手折伞会把手弄的都是水。于是就想能不能有一个既可以把水除去,又可以快速把雨伞折叠起来的工具,应用在大型超市及写字楼地铁站等公共场所,一定可以给生活带来方便,还会大大减少雨后卫生打扫的困难。
2. 本课题设计的应用与发展前景
1) 市场需求
通过对学校附近4家大型超市及各写字楼工作人员的调查,有90%的很赞成有这么一个工具,其中有两个超市已经有免费提供塑料袋的措施,管理人员表示其实这样可以减少地面的积水维护超市购物环境,因此此发明有市场前景。
2) 成本
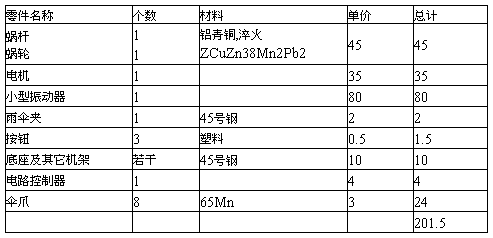
图1零件总成本统计
3) 盈利空间
如果批量生产,价格会控制在150元左右,在加上其它成本,总成本可能在170元左右,这样一台机器的售价可放在250到350之间,有较大的盈利空间。
三、 本课题设计的创新点
…… …… 余下全文

 江苏科技大学
江苏科技大学