ʵ��� ��ͨ�Ƴ������
� 20100740123
һ ʵ����Ŀ
��ͨ�ƿ���ϵͳ���
�� ʵ��Ŀ��
1��ѧ����8051��Ƭ�������ļ��������ϵͳ��
2��ѧ���û�����Ժ�C���Կ���ϵͳ������
3��ѧ��8051��Ƭ����������wave��Keil uVision3������ʹ�ã�
4��ѧ��Proteus������ʹ�÷���������Proteus��Ƭ��ϵͳ���з��棻
5��ѧ��Protel������ʹ�÷���������Protel���Ƶ���ԭ��ͼ��ӡ�ư�ͼ��
6����Ϥ��λ�������ʾ��ʹ�÷�����
7���˽⽻ͨ�ƿ���ϵͳ�Ļ�����ɡ�
�� ʵ��Ҫ��
��ͨ�ƴ���ʮ��·���ϡ����к�p�Ʃp��������ɫ�ĵ���ɡ������ʱ��·�ϵij���ֹͣ���У��Ƶ���һ�ֹ����õ��źŵƣ�������ʱ����ʾ��·�ϵĺ���ɫ�źŵƼ�������ת���������ö����ϱ��ĸ�������˵�������������������г���������ת����ʱ���ϱ�����ͽ�ֹ�г�������ʱ����������̵�������𣬶��ϱ�������̵�����������֮���ϱ����������г���������ת����ʱ��������ͽ�ֹ�г�������ʱ�ϱ�������̵�������𣬶�����������̵�����������ͨ������ʾ��ͼ��ͼ1��ʾ��ͬʱ����������������ʱ�����ֶ����Ƹ���������źŵơ����������ǽ���һ��·�õ�Ƭ����ʵ�־���Ŀ��ơ�
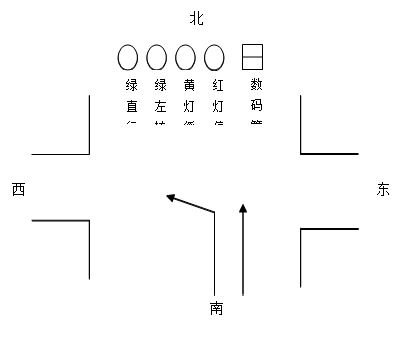 ͼ1 ʮ��·�ڽ�ͨ������ʾ��ͼ
ͼ1 ʮ��·�ڽ�ͨ������ʾ��ͼ
�����������ԭ��
Ϊ���ں���ķ����б���˵�������ϱ���������ֱ������Ϊ״̬1���ϱ�����������ת����Ϊ״̬2���ϱ������г������������г���ת��������Ϊ״̬3����������������ֱ������Ϊ״̬4����������������ת����Ϊ״̬5�����������г����ϱ��������г���ת��������Ϊ״̬6��
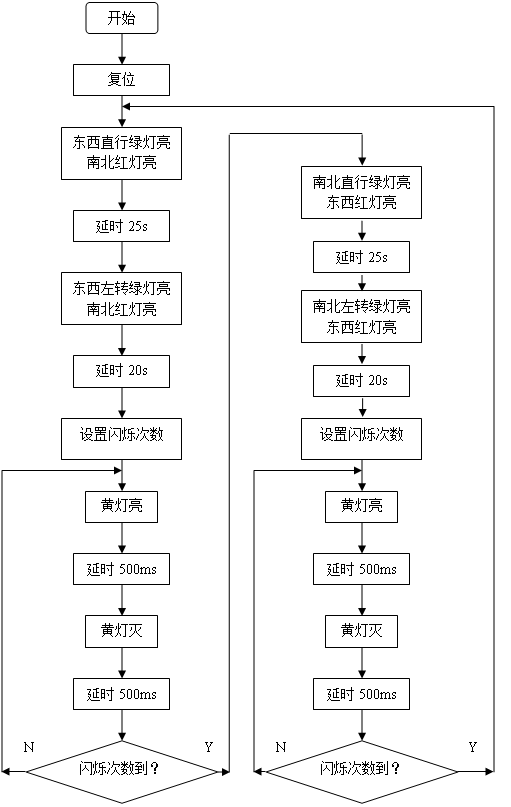
�ٶ�ֱ���̵Ƶ�����ʱ��Ϊ25s����ת�̵Ƶ�����ʱ��Ϊ20s���ƵƵ�����ʱ��Ϊ5s����Է���Ƶĵ���ʱ��Ϊ50�롣�Ƶ�ÿ��500ms��һ�Σ�֮����500ms������һ�ν�����˸һ�Σ���һ����˸5�Σ�����5s������״̬֮��ı任������£�

������ʾ�������£�
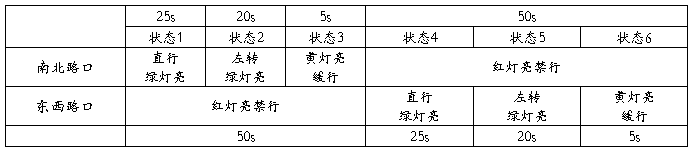
ͼ2��ͨ�źŵƵ���ʱ��ͼ
��Ƶ�·��ÿ��·�ڵĿ����źŵ�Ӧ���ĸ������̵��������Ƶơ���Ƹ�һ����ͬʱ��Ҫ�߶������һ������ˣ�����·�������Ӧ�õ��̵ư˸����Ƶ��ĸ�������ĸ����߶����������������������ͬ���ϱ�������ͬ��Ϊ��ʡ�ռ��ʡ��һ�ԣ���
�� ��·��Ʒ���
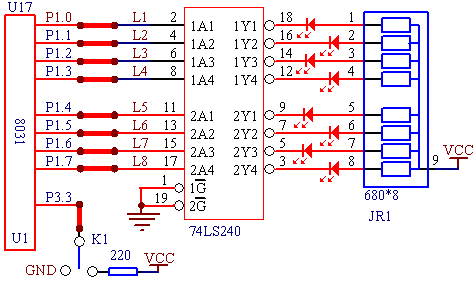
����ǰ������������ԭ����������·�����Ӧ�п���ģ�飨��Ƭ����·������ʾģ�飨ʮ�����źŵƺ������߶�����ܣ�����·����ƣ��������������Ϊ16���źŵƵIJ��ϡ���Դ������5V��ֱ����Դ����������������̵���ͬʱ���ģ�Ϊ�˼�·�������������ƽ�ͬһ�����š�ͬ������������ĻƵơ����Ҳ���Էֱ��ͬһ�����š��ϱ�����ͬ�ϡ��������ǿ�����һ��8λ�ڿ���16յ�źŵơ�
���źŵƾ��ǹ������ӷ���LED�������ӵأ�����ͨ����������ӵ�Ƭ��P1�ڡ�������Ƭ�����ŵ����һ���ߵ�ƽʱ����Ӧ���źŵƾͱ��������߶�����ܾ���8λ����RESPACK-8���ӡ�
��Ƭ����Ӧ������λ��·�;����·��������У������ϵ縴λ��ʽ�����ڱ�ϵͳӦ�õĻ�������Ϊlms�����Ծ���ѡ��Ϊ12MHz�����ݵ��Ե���ѡ��30pF��

ͼ3����λ��·
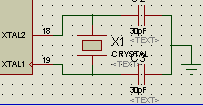
ͼ4�������·
�� Ӳ��ԭ��ͼ
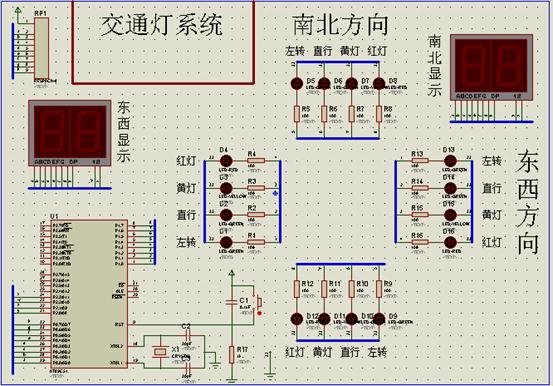
����������
������ij�������ͼ��ͼ��ʾ
���ĵ����
���ϵͳʵ����ʱһ���µ�ʱ�䣬����ʵ����������ǹ����˴ӱ�̡�����ʹ�õ����Ե�רҵ֪ʶ����˼ά�Ͷ����������õ��˺ܴ����ߡ�
Ҫ�������Ҫ������dz������ƺͷ��棬��Ȼ��������ƺͲ��֡����ʱ˼·�Ƚ����������ǵ���ϸ�ڴ���Ҳ���˲������⣬���Һ��ѱ������������ڶ�ʱ��ʹ�÷������һЩ�������������Ŭ��������д������ȷ�Ĵ��롣
ͨ�����ϵͳʵ�飬����ǰѧ����֪ʶ�����˹��̣����������⣬�����Ӧ�õ�������������������ǵķ��֡���������������������ͬʱ����˶�רҵ����ʶ����Ȥ���������ǹ�������˵�����Ժ��ҵ���а�����
��¼ ������룺
#define uchar unsigned char
#define uint unsigned int
#include <reg52.h>
/*****�������λ**********************/
sbit EW_LED2=P2^3; //��������ܸ�λ
sbit EW_LED1=P2^2; //���������ʮλ
sbit SN_LED2=P2^1; //�ϱ�����ܸ�λ
sbit SN_LED1=P2^0; //�ϱ������ʮλ_
sbit SN_Yellow=P1^6;//�ϱ��Ƶ�
sbit EW_Yellow=P1^2;//�����Ƶ�
sbit EW_Red=P1^3;//�������
sbit SN_Red=P1^7;//�ϱ����
sbit Busy_Btton=P3^4;
bit Flag_SN_Yellow; //�ϱ��ƵƱ�־λ
bit Flag_EW_Yellow;//�����ƵƱ�־λ
char Time_EW;//��������ʱ��Ԫ
char Time_SN;//�ϱ�����ʱ��Ԫ
uchar EW=50,SN=25,EWL=20,SNL=20; //�����ʼ����ֵ
uchar EW1=50,SN1=25,EWL1=20,SNL1=20;//���ڴ����ֵ�ı���1-9��ѡ��
uchar
code table[10]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90 };
uchar code S[8]={0X28,0X48,0X18,0X48,0X82,0X84,0X81,0X84};//��ͨ�źŵƿ��ƴ���
/**********************��ʱ�ӳ���************************/
void Delay(uchar a)
{
uchar i;
i=a;
while(i--){;}
}
/*****************��ʾ�Ӻ���**************************/
void Display(void)
{
char h,l;
h=Time_EW/10;
l=Time_EW%10;
P0=table[l];
EW_LED2=1;
Delay(200);
EW_LED2=0;
P0=table[h];
EW_LED1=1;
Delay(200);
EW_LED1=0;
h=Time_SN/10;
l=Time_SN%10;
P0=table[l];
SN_LED2=1;
Delay(200);
SN_LED2=0;
P0=table[h];
SN_LED1=1;
Delay(200);
SN_LED1=0;
}
/**********************T0�жϷ������*******************/
void timer0(void)interrupt 1 using 1
{
static uchar count;
TH0=(65536-50000)/256;
TL0=(65536-50000)%256;
count++;
if(count==10)
{
if(Flag_SN_Yellow==1) //�ϱ��ƵƱ�־λ
{SN_Yellow=~SN_Yellow;}
if(Flag_EW_Yellow==1) //�����ƵƱ�־λ
{EW_Yellow=~EW_Yellow;}
}
if(count==20)
{
Time_EW--;
Time_SN--;
if(Flag_SN_Yellow==1)//�ϱ��ƵƱ�־λ
{ Time_SN=Time_EW;
{
SN_Yellow=~SN_Yellow;}
}
if(Flag_EW_Yellow==1)//�����ƵƱ�־λ
{ Time_EW=Time_SN;
{
EW_Yellow=~EW_Yellow;
}
}
count=0;
}
}
void main(void)
{
IT0=1; //INT0�����䴥��
TMOD=0x01;//��ʱ�������ڷ�ʽ1
TH0=(65536-50000)/256;//��ʱ������ֵ
TL0=(65536-50000)%256;
EA=1; //���������
ET0=1;//����ʱ�ж�
EX0=1;//���ⲿINTO�ж�
TR0=1;//������ʱ
while(1)
{ /*******״̬1**********/
Flag_EW_Yellow=0; //EW�ػƵ���ʾ�ź�
Time_EW=EW;
Time_SN=SN;
while(Time_SN>0)
{P1=S[0]; //SNͨ�У�EW���
Display();}
/*******״̬2**********/
Flag_SN_Yellow=0; //SN�ػƵ���ʾ�ź�
Time_SN=SNL;
while(Time_SN>0)
{P1=S[2];//SN����̵�����EW���
Display();}
/*******״̬3**********/
P1=0x00;
while(Time_EW>0)
{Flag_SN_Yellow=1; //SN���Ƶ��ź�λ
EW_Red=1; //SN�Ƶ���,�ȴ�ֹͣ�źţ�EW���
//SN_LED1=EW_LED1;
//SN_LED2=EW_LED2;
Display();
}
/***********��ֵ**********/
EW=EW1;
SN=SN1;
EWL=EWL1;
SNL=SNL1;
/*******״̬4**********/
Flag_SN_Yellow=0; //SN�ػƵ���ʾ�ź�
Time_EW=SN;
Time_SN=EW;
while(Time_EW>0)
{P1=S[4]; //EWͨ�У�SN���
Display();}
/*******״̬5**********/
Flag_EW_Yellow=0; //EW�ػƵ���ʾ�ź�
Time_EW=EWL;
while(Time_EW>0)
{P1=S[6];//EW����̵�����SN���
Display();}
/*******״̬6**********/
P1=0X00;
while(Time_SN>0)
{Flag_EW_Yellow=1; //EN���Ƶ��ź�λ
SN_Red=1;//EW�Ƶ������ȴ�ֹͣ�źţ�SN���
Display();}
/***********��ֵ**********/
EW=EW1;
SN=SN1;
EWL=EWL1;
SNL=SNL1;
}
}
�ڶ�ƪ����Ƭ��ʵ�鱨��2
��Ƭ��ԭ����Ӧ��
ʵ�鱨��
�༶������0911
ѧ�ţ�0720106114
������������
20##��12��
ʵ��һ P1������/���ʵ��
һ��ʵ��Ŀ��
1������P1�ڼ�ʹ�ã�����ļ�̡�
2��ѧϰ��ʱ����ı�д��ʹ�á�
����ʵ������
P1��������ڣ���д����ʹP1�ڽӵ�8�����������L1��L8��16���Ƽ�һ��ʽ������������ܡ�
����ʵ��˵����
1��P1����˫��ڣ�����Ϊ�����ʱ��һ���˫���ʹ�÷�����ͬ����˫��ڽṹ��֪����P1����Ϊ�����ʱ�������ȶ����øߵ�ƽ��ʹ�ڲ�MOS�ܽ�ֹ�����ڲ�����������20K����40K�����ʲ�����ⲿ�������Ӱ�졣�����ȶ����øߣ���ԭ���ǵ͵�ƽ����MOS�ܵ�ͨ������������Dz���ȷ�ġ���
2����ʱ�ӳ������ʱ�������⡣��������ʱ����
DELAY :MOV R6, #00H
DELAY1:MOV R7, #80H
DJNZ R7, $
DJNZ R6, DELAY1
��ָ�����֪MOV��DJNZָ������������������ڣ���һ����������ʱ�䳤��Ϊ12/ 6.0MHZ,���Ըö�ָ��ִ��ʱ��Ϊ��((80+1)×256+1)×2×(12÷6000000)=132.1ms
�ġ�ʵ�鲽�誥
��P3��3������K1�� P1��0��P1��7������L1��L8����
�ڴ���ʼ��ַ0540H��ʼ�������г���(����0540��EXEC��)����
�ۿ���K1ÿ����һ�Σ�L1��L8��������ܰ�16���Ʒ�ʽ��һ��������LM��
�塢ʵ��ԭ��ͼ
����ʵ�����
ORG 0540h
HA1S: MOV A,#00H
HA1S1: JB P3.3,HA1S1
MOV R2,#20H
LCALL DELAY
JB P3.3,HA1S1
HA1S2: JNB P3.3,HA1S2
MOV R2,#20H
LCALL DELAY
JNB P3.3,HA1S2
INC A
PUSH ACC
CPL A
MOV P1,A
POP ACC
AJMP HA1S1
DELAY: PUSH 02H
DELAY1: PUSH 02H
DELAY2: PUSH 02H
DELAY3: DJNZ R2,DELAY3
POP 02H
DJNZ R2,DELAY2
POP 02H
DJNZ R2,DELAY1
POP 02H
DJNZ R2,DELAY
RET
END
�ߡ�ʵ�����
ͨ����ʵ�飬��������P1�ڼ�ʹ�ã�����ļ���Լ�ѧ������ʱ����ı�д��ʹ�á�ʵ���У���P1�����������ʱ�������ȶ����á�1���������ȶ����á�1������������ݲ�һ����ȷ��
ʵ����ⲿ�ж�ʵ��
һ��ʵ��Ŀ��
���չ�ҵ˳����Ƴ���ļ�̣��жϵ�ʹ�á�
����ʵ������
8032��P1��0��P1��6����ע�ܻ����ߵ�������ģ�������ֻ��������ܵĵ������ߵ�ƽ��Ч���趨ÿ������ʱ��ת��Ϊ��ʱ��P3.4Ϊ�����������أ��͵�ƽ������P3.3Ϊ���������ģ��أ�P3.3Ϊ0ʱ���ϸ澯��P1.7Ϊ��������������趨6������ֻ��һλ��������ߵ�������λ���������
����ʵ��˵����
ʵ�������ⲿ�ж�0�����жϷ������Ĺؼ��ǣ���
1�����������ж�ʱ��״̬�������˳��ж�֮ǰ�ָ������״̬����
2���������жϳ������趨�Ƿ������ж����룬������EX0λ��
һ���жϳ������ʱӦ����PSW��ACC�Լ��жϳ���ʹ�õ�����ר�õļĴ�������ʵ����δ�漰����
�ġ�ʵ�鲽�誥
��P3.4��K1��P3.2��K2��P1.0��P1.6�ֱ�����L1��L7��P1.7��SIN(�������������)��
����K1���ز������棬K2�������档
������������ʽ����ʼ��ַ0580H��ʼ���г���(����0580��EXEC��)����ʱӦ�ڵȴ�����״̬��
����K1��������(�Ե͵�ƽ)����������Ӧ�������С���
��K2��������(�͵�ƽ)��Ӧ����������(��Ϊ���ù���)������K2��������(�ߵ�ƽ)�����ų����ϣ�����Ӧ�Ӹղű������ǵ��������ִ�С�
�塢ʵ��ԭ��ͼ

����ʵ�����
ORG 0013H
LJMP HA2S3
ORG 0580H
HA2S: MOV P1,#07FH
ORL P3,#00H
HA2S1: JNB P3.4,HA2S1
ORL IE,#84H
ORL IP,#04H
MOV PSW,#00H
MOV SP,#53H
HA2S2: MOV P1,#07EH
ACALL HA2S7
MOV P1,#07DH
ACALL HA2S7
MOV P1,#07BH
ACALL HA2S7
MOV P1,#077H
ACALL HA2S7
MOV P1,#06FH
ACALL HA2S7
MOV P1,#05FH
ACALL HA2S7
MOV P1,#03FH
ACALL HA2S7
SJMP HA2S2
HA2S3: MOV B,R2
HA2S4: MOV P1,#07FH
MOV 20H,#0A0H
HA2S5: SETB P1.7
ACALL HA2S6
CLR P1.7
ACALL HA2S6
DJNZ 20H,HA2S5
CLR P1.7
ACALL HA2S6
JNB P3.2,HA2S4
MOV R2,B
RETI
HA2S6: MOV R2,#06H
ACALL DELAY
RET
HA2S7: MOV R2,#30H
ACALL DELAY
RET
DELAY: PUSH 02H
DELAY1: PUSH 02H
DELAY2: PUSH 02H
DELAY3: DJNZ R2,DELAY3
POP 02H
DJNZ R2,DELAY2
POP 02H
DJNZ R2,DELAY1
POP 02H
DJNZ R2,DELAY
RET
END
�ߡ�ʵ�����
ͨ����ʵ�飬�������˹�ҵ˳����Ƴ���ļ�̣��жϵ�ʹ�á�ѧ�����ⲿ�жϼ����Ļ���ʹ�÷������Լ�ѧ���жϴ�������ı�̷���������Ҫ�����˳�����룬�ı䴥����ʽ��Ҳ������������һ��ʼ�����г��ִ����ں�ͬѧ���ֲ�����鱾����ҳ��������ڡ�
ʵ��������ʱ��ʵ��
һ��ʵ��Ŀ��
���յ�Ƭ����ʱ��/�������Ĺ�����ʽ�ͱ��ԭ����
����ʵ������
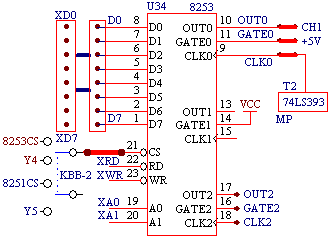
8253A��0ͨ�������ڷ�ʽ3������������
����ʵ�鲽�誥
���ò����8253��CLK0��ͷ�Ƶ�����T2�����������
��8253��GATE0���+5V�����������
��8253��Ƭѡ�ź�8253CS�����������Y4��������
��KBB�������OFFλ�á���
�������߽�SIO����D0��D7����BUS2��XD0��XD7����
���ڡ�P.....��״̬�£�����ʼ��ַ08C0H��ʼ�������г�����ʾ������8253��0ͨ�������OUTO��Ӧ�з���������
�ġ�ʵ��ԭ��ͼ
�塢ʵ�����
ORG 08C0H
L8253: MOV DPTR,#0C003H
MOV A,#36H
MOVX @DPTR,A
MOV DPTR,#0C000H
MOV A,#00H
MOVX @DPTR,A
MOV A,#10H
MOVX @DPTR,A
SJMP $
END
����ʵ�����
ͨ����ʵ�飬�����յ�Ƭ����ʱ��/�������Ĺ�����ʽ�ͱ��ԭ������������Ƚϼ�ͨ��8253A��0ͨ�������ڷ�ʽ3����������ֻ���ڷ���ʱ������һЩС���⣬������Ҫ���Ϸ��֣��ܽᣬ���ã�����һЩ���ɿ��Դ�����ʵ�������ӵ�·���ٶȡ�
ʵ���ģ�����ͨ��ʵ��
һ��ʵ��Ŀ��
1���մ��пڹ�����ʽ�ij�����ƣ����յ�Ƭ��ͨ�ų�����Ʒ�����
2�˽�ʵ�ִ���ͨ�ŵ�Ӳ���������ݸ�ʽ��Э�飬���ݽ�����Э�顣��
����ʵ������
1������8031��Ƭ�����пڣ�ʵ��˫��ͨ�š���
2����ʵ��ʵ�����¹��ܣ���1��ʵ��������ϼ�������֡���ĸ��ʾ��2�Ż���������ϡ���
����ʵ��˵����
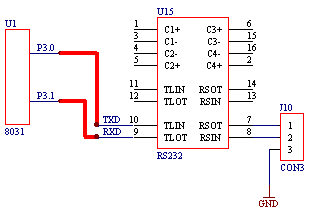
1����ʵ��ϵͳ�п����û����Է���ʹ�ô��п�ʵ��˫�������λ��ͨ�ţ�ϵͳ������û�ר�ô��нӿڣ�ֻҪ�����û�ר��ͨ�ŵ����߾Ϳ���ʵ�ֺ���λ��ͨ�ţ���Ӱ����ϵͳ����λ��������������J10�����û�ר�ô��нӿڣ���J10���û�ר��ͨ����������λ���Ĵ����ϡ�ע�ⲻҪ����λ��ϵͳ�ô��пڳ�ͻ����
2��ʵ��ʱ�轫1�Ż�8031���н����ź���P3.0(RXD)����2�Ż�8031���пڷ����ź���P3.1(TXD)����
�ġ�ʵ�鲽�誥
1.����ͼ������·����
2.����DVCCʵ��ϵͳ����"P."״̬�¡���
3.��1�Ż�������λ��ʼ��ַ0D00��EXEC���������г���
4.��2�Ż�������λ��ʼ��ַ0E30��EXEC���������г���
5.����1�Ż��ϵļ����������ּ�������ʾ��2�Ż���������ϡ�
�塢ʵ��ԭ��ͼ
����ʵ�����
;ϵͳ������ 6.0 MHz
ORG 0E30H
START:
MOV SP,#60H
mov A,#02H
MOV R0,#79H
MOV @R0,A
INC R0
MOV A,#10H
MOV @R0,A
INC R0
MOV A,#01H
MOV @R0,A
INC R0
MOV A,#03H
MOV @R0,A
INC R0
MOV A,#00H
MOV @R0,A
INC R0
MOV A,#08H
MOV @R0,A
MOV A,#7EH
MOV DPTR,#1FFFH
MOVX @DPTR,A
MOV SCON,#50H ;���� ��ʽ 1
MOV TMOD,#20H ;T1 ��ʽ 1
MOV TL1,#0CCH ;������ 9600 �ij���
MOV TH1,#0CCH
SETB TR1 ;���ж�
CLR ET1
CLR ES
WAIT:
JBC RI,DIS_REC ;�Ƿ���յ�����
LCALL DISP ;
SJMP WAIT ;
DIS_REC:
MOV A,SBUF ;�����ڽ��յ�������
LCALL DATAKEY ;��ʾ���������(0-F)
DB 79H,7EH
AJMP WAIT
DATAKEY:MOV R4,A
MOV DPTR,#1FFFH
MOVX A,@DPTR
MOV R1,A
MOV A,R4
MOV @R1,A
CLR A
POP 83H
POP 82H
MOVC A,@A+DPTR
INC DPTR
CJNE A,01H,DATAKEY2
DEC R1
CLR A
MOVC A,@A+DPTR
DATAKEY1:PUSH 82H
PUSH 83H
MOV DPTR,#1FFFH
MOVX @DPTR,A
POP 83H
POP 82H
INC DPTR
PUSH 82H
PUSH 83H
RET
DATAKEY2:DEC R1
MOV A,R1
SJMP DATAKEY1
DISP: SETB 0D4H
MOV R1,#7EH
MOV R2,#20H
MOV R3,#00H
DISP1:
MOV DPTR,#DATACO
MOV A,@R1
MOVC A,@A+DPTR
MOV DPTR,#0FF22H
MOVX @DPTR,A
MOV DPTR,#0FF21H
MOV A,R2
MOVX @DPTR,A
LCALL DELAY
DEC R1
CLR C
MOV A,R2
RRC A
MOV R2,A
JNZ DISP1
CLR 0D4H
RET
DELAY: MOV R7,#03H
DELAY0: MOV R6,#0FFH
DELAY1: DJNZ R6,DELAY1
DJNZ R7,DELAY0
RET
DATACO: DB 0C0H,0F9H,0A4H,0B0H,99H,92H,82H,0F8H,80H,90H
DB 88H,83H,0C6H,0A1H,86H,8EH,0BFH,0CH,89H,0DEH
END
�ߡ�ʵ�����
ͨ������ʵ�飬�������˴��пڹ�����ʽ�ij�����ƣ����յ�Ƭ��ͨ�ų�����Ʒ��������˽���ʵ�ִ���ͨ�ŵ�Ӳ���������ݸ�ʽ��Э�飬���ݽ�����Э�顣�����˽ʵ������ͨ�ŵ�ԭ���ͷ�ʽ���Լ�������Ĵ���ͨ��������λ��У��λ�Ĺ�ϵ��