题 目: 轮式与履带式教学机器人的模块化设计
学院: 机械与电子控制工程学院 专 业: 机械工程及自动化
学生姓名: 学 号:

指导教师签名: 审核日期: 年 月 日
第二篇:爬楼梯机器人开题报告
分类号________ 密级________ UDC________ 编号________
江西理工大学
开 题 报 告
论文题名全方位移动爬楼梯机器人小车的研究
申请学位级别___工学硕士___ _
专 业 名 称 机械电子工程__
学 号 _ _____
研究 生 姓名 ______ _
导师姓名 、职称 _ ____
20xx年 12月
目录
一、课题意义……………………………………………………………………2
(一)具有越障功能移动机器人的简介………………………………………...2
(二) 具有越障功能机器人研究的文献综述…………………………………..4
二 、课题方案……………………………………………………………………8
(一)课题研究的主要内容 ……………………………………………………8
(二)研究目标及创新 ……………………………………………………10
三 、可行性分析…………………………………………………………………10
四 、课题进度安排 ………………………………………………………………12
五 、参考文献……………………………………………………………………..12
1
一、课题意义
(一) 具有越障功能移动机器人的简介
机器人作为一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。对不同任务和特殊环境的适应性,也是机器人与一般自动化装备的重要区别。非结构环境中的多功能全自主的移动机器人技术多年来一直是机器人研究中的热点问题之一.但是非结构环境给移动机器人的运动造成了自主决策和路径规划的困难. 越障机器人的研究.对扩展机器人的作业空间,在人不能到达或不便到达的环境中进行作业,具有重要的意义。越障机器人还可用于工业中的一些险难作业,不仅可提高产品的质量与产量,而且对保障人身安全,改善劳动环境.减轻劳动强度,提高劳动生产率,节约原材料消耗以及降低生产成本,有着十分重要的意义。其中,移动机器人从事各项事务响应任务时,楼梯是人造环境中的最常见的障碍,也是最难跨越的障碍之一。针对各种不同的运动环境,一直以来移动机器人所采用的运动方式大体包括轮式、履带式、足式等。
国外对爬楼梯装置的研究开始得相对较早,最早的专利是1892年美国的Bray发明的爬楼梯轮椅。此后,各国纷纷开始投入此项研究,其中美国、英国、德国和日本占主导地位,技术相对比较成熟,且有一些产品已经投入市场使用。我国对此类装置的研究虽然起步较晚,但近年来也涌现了很多这方面的专利,然而投入实际使用的还很少。
总结目前国内外现有的爬楼梯装置和专利,按爬楼梯功能实现的原理主要分为履带式、轮组式、步行式爬楼梯装置。下面分别对国外、国内各种类型装置的发展作简要介绍,并分析其各自优缺点。
(l)履带式
履带式爬楼梯装置的原理类似于履带装甲运兵车或坦克,其原理简单,技术也比较成熟。英国Baronmead公司开发的一种电动轮椅车,底部是履带式的传动结构,可爬楼梯的最大坡度为35°,上下楼梯速度为每分钟15--20个台阶。法国Topchair公司生产的电动爬楼梯轮椅,它的底部有四个车轮供正常情况下平地运行使用,当遇到楼梯等特殊地形时,用户通过适当操作将两侧的橡胶履带缓缓放下至地面,然后把这四个车轮收起,依靠履带无需旁人辅助便能自动完成爬楼等功能。
2
履带式结构传动效率比较高,行走时重心波动很小,运动非常平稳,且使用地形范围较广,在一些不规则的楼梯上也能使用。它除了具备爬楼梯功能外,也能作为普通的电动轮椅使用。但是这类装置仍存在很多不足之处:重量大、运动不够灵活、爬楼时在楼梯边缘造成巨大的压力,对楼梯有一定的损坏;且平地使用所受阻力较大,而且转弯不方便,这些问题限制了其在日常生活中的推广使用。
(2)轮组式
轮组式爬楼梯装置按轮组中使用小轮的个数可分为两轮组式、三轮组式以及四轮组式。单轮组式结构稳定性较差,在爬楼过程中需要有人协助才能保证重心的稳定;而双轮组式虽能实现自主爬楼,但由于其体积庞大且偏重,影响了它的使用范围。
美国著名发明家Dean Kamen发明的了一种能自动调节重心的两轮组式轮椅iBOT。它有6个轮子,前面有一对实心脚轮,后面有两对行星结构的充气轮胎,通过两后轮交替翻转可以上下楼梯。iBOT几乎能适用于所有楼梯,此外它也能在沙滩、斜坡和崎岖的路面上行驶,而且后轮可以直立行走,为使用者提供了更多方便之处,帮助他们能达到正常人的高度。它最大的优点就是在轮椅重心安装了陀螺仪,控制器根据陀螺仪的信号调整重心的位置,使轮椅能在不同状态下保持平衡。经过数十年的研究开发,它己经由iBOT3000发展到了iBOT400O,功能也越来越强大,是目前该领域中性能最高的产品,它的售价在3万美元左右,相当于一辆中档桥车的价格,难以被普通使用者接受。
我国在上世纪八十年代对轮组式爬楼梯装置已有研究,19xx年专利号为86210653的国家专利中介绍了一种平地、楼梯运行多用轮椅,前滚轮和后滚轮都用多个星形轮组成,除自转外还绕滚轮轴公转而实现上下楼。内蒙古民族大学物理与机电学院的苏和平等人借鉴了iBOT的爬楼方式,采用星形轮系作为爬楼梯机构,设计了一种双联星形机构电动爬楼梯轮椅。改轮椅爬楼时需要人工辅助或者楼梯扶手的辅助支撑,使其能调整重心的位置,安全爬楼。
轮组式爬楼梯装置的活动范围广,运动灵活,但是上下楼梯时平稳性不高,重心起伏较大,会使乘坐者感到不适。此外,轮组式爬楼梯装置体积较大,很难在普通住宅楼梯上使用。
(3)步行式
早期的爬楼梯装置一般都采用步行式,其爬楼梯执行机构由铰链杆件机 3
构组成。上楼时先将负重抬高,再水平向前移动,如此重复这两个过程直至爬完一段楼梯。步行式爬楼梯装置模仿人类爬楼的动作,外观可视为足式机器人,采用多条机械腿交替升降、支撑座椅爬楼的原理。
步行式爬楼梯装置爬楼时运动平稳,适合不同尺寸的楼梯;但它对控制的要求很高,操作比较复杂,在平地行走时运动幅度不大,动作缓慢。
综上所述,国外在爬楼梯装置方面的研究已经有一百多年的历史,成果也较多,但是它们大多结构复杂、造价昂贵,远远超出了发展中国家人民的经济承受能力。国内的研究相对较晚,虽然也诞生了很多专利,但由于受到体积、重量、稳定性及安全性的限制,还没有产品真正投入使用。由此可见,为了解决移动机器人使用受限的问题,同时考虑到我国使用者的经济承受能力,需要研究一种价格低廉、功能多样的爬楼梯装置。
用作搬运的自主移动机器人,要求能随工作任务和环境的改变,智能地重规划行驶路径,并要求能快速适应工作环境。要达到这种水平,当前还有很多问题需要深入的研究,而其中的机器人楼梯环境智能导航问题是较为重要的一个研究课题。
(二) 具有越障功能机器人研究的文献综述
Ⅰ、应用:
楼梯是人造环境中的最常见的障碍,也是最难跨越的障碍之一,爬楼梯机器人的研究是解决当前全自主机器人在非结构环境下正常工作的重要环节之
一。爬楼梯机器人可应用于危险环境探查、侦察、救灾、导盲、助残、搬运、清扫、维修、安装等作业,其实际意义重大。
Ⅱ、对目前研究的状况分类:
(1)开环控制与伺服控制分类
在目前已开发的研究项目中,开环控制的机器人主要是运用于为残疾人和老人设计的器械中,需要人的辅助来为其导航,其突出特点的是稳定性,确保人的安全性。
伺服控制的设计也可分为嵌入式控制和高智能CPU控制。嵌入式控制运用一些光电传感器,来控制机器人的速度、方向;高智能CPU能够采集更广泛的信息(比如需要高运算内存空间的视觉采集系统),实现轨迹及运动目标跟踪、视觉信息的分析与处理、地面轨迹图像的计算机理解与处理。
4
也有半自动的,通过人的控制为其导航。但便携式、履带等机器人控制距离有限,当履带机器人在危险区域作业时,其控制操作人员的安全不能保证,此外遥控机器人的操作人员需要专门训练,因而进一步提高机器人自主能力是该研究方向的趋势。
(2)机构设计上分类
1、履带机器人
履带式爬楼梯装置的原理类似于履带装甲运兵车或坦克,其原理简单,传动效率比较高,行走时重心波动很小,运动非常平稳,且使用地形范围较广,在一些不规则的楼梯上也能使用,技术比较成熟。
履带式移动机器人以其强大的地形适应性而倍受青睐,但是也有不足之处。其重量大、运动不够灵活、爬楼时在楼梯边缘造成巨大的压力,对楼梯有一定的损坏;且平地使用所受阻力较大,而且转弯不方便,这些问题限制了其在日常生活中的推广使用。
2、轮式机器人
轮式移动机器人克服了履带式的这些缺点,在满足一定地形适应性的前提下,可以充分发挥移动机器人快速性、灵活性、可控性,而且能够在保持机体方位不变的前提下沿平面上任意方向直线移动或在原地旋转任意角度,近年来得到了广泛的研究。
但是它对地形的适应性远不如履带式机器人,一般来说,轮式移动机器人对地形的适应性大小与轮子的数量成正比,但是随着轮子数量的增加,又带来了机器人体积庞大、重量重等缺点。怎样使轮子的数量越少而同时又有能够满足使用要求的地形适应性,这对机器人设计具有重要意义。
单轮组式结构稳定性较差,在爬楼过程中需要有人协助才能保证重心的稳定;轮组式爬楼梯装置的活动范围广,运动灵活,但是上下楼梯时平稳性不高,重心起伏较大。此外,轮组式爬楼梯装置体积较大,很难在普通住宅楼梯上使用。
3、腿式机器人
早期的爬楼梯轮椅一般都采用步行式,其爬楼梯执行机构由铰链杆件机构组成。上楼时先将轮椅抬高,再水平向前移动,如此重复这两个过程直至爬完一段楼梯。步行式爬楼梯装置模仿人类爬楼的动作,外观可视为足式机器人,采用多条机械腿交替升降、支撑座椅爬楼的原理。
5
步行式爬楼梯装置爬楼时运动平稳,适合不同尺寸的楼梯;但它对控制的要求很高,操作比较复杂,在平地行走时运动幅度不大,动作缓慢。此外,座椅距地面的高度较大,易给使用者造成心理恐惧,距离实际应用还有很大的距离
4、复合类机器人
基于履带式、轮式、腿式移动机器人的优缺点,在研究中,采用了腿-履复合和轮-腿-履带复合等结构。设计主要是依靠腿式机构来完成越障,以及履带平稳性和轮组的灵活性来达到功能的完整。机器人摆臂在一定范围可上下摆动,辅助越障、攀爬,具有较强的越障性能、路面通过性和上下台阶能力。
但是各种机构的复合也给控制方面提出了更高的要求,而且爬楼过程中的稳定性、如何适应不同尺寸的楼梯、如何实现手动操作省力与省时的问题以及反向自锁等问题仍然存在。
5、轮、履、腿式移动机构性能比较
车轮式、履带式、腿式移动系统性能比较见下表1所示。
Ⅲ、分析问题
1、爬楼梯装置在爬楼梯过程中的稳定性是影响其实用安全性的重要指标; 2、使用安全性;
3、对于多功能爬楼梯装置,如何实现平地模式与爬楼模式之间的平滑切换也是重要的问题。
为解决以上这些问题,传感器技术、计算机控制技术必将越来越多地应用到爬楼梯装置中,从而提高装置的自动化程度以及使用安全性、舒适性。同时,伴随机器人控制技术的发展,移动机器人的大量技术如计算机视觉、机器人导航和定位、模式识别等也将被运用到爬楼梯装置中,使其朝着智能化的方向发展。多功能爬楼梯装置将融合机械、控制、传感器、人工智能等技术于一体,
6
逐渐跨入服务机器人的行列。
一般在各研究中会采用以下几个研究方法:
①在机构的设计中采用功能分析的方法,确定机构各尺寸关系间的约束关系。
②运动学分析:建立合理的运动学模型,从而对不同运动阶段进行分析。 ③运动学仿真与分析:在机器人越障的运动学模型基础上,改变机构相关尺寸进行仿真分析,从而得到最优解。
④对机体质心及其稳定性进行分析,选取合适参数做仿真,得到最优解。 ⑤介绍了机器人结构实现方法,从传动设计、零件组成及选用,从设计方面对机器人的结构进行了详细说明。
⑥机构动力消耗问题的研究。
⑦设计的机构在模态环境和非模态环境下使用情况的对比,验证其适应性。
在控制方面的研究:
①电机的选择及控制原理;
②信号检测装置设计与选择(超声波传感器测距,激光测距扫描仪,基于视觉的检测);
③信息的融合(贝叶斯方法、DS证据理论、模糊集理论、神经网络、聚类分析、模板方法、估计理论等);
④电路的设计;
⑤控制系统介绍(系统具有开放性);
Ⅳ、总结
通过以上分析,笔者认为爬楼梯机器人首先要解决好“爬”的问题,即将机构设计好,其次是设计好控制系统,弥补机械部分的不足。机构要解决:①机器人平地行驶与爬楼梯之间的转换;②爬楼梯的动作;③机构在保持稳定性的基础上保持灵活性;④设计最优结构,降低整个机器人的能耗。控制部分:①采集信号,要尽可能准确且具有一定鲁棒性;②使机器人功能尽可能完善,并朝着智能化,自主化方向发展。结合我国国情,开发应尽可能结构简单,造价低廉,通用性强。
7
二 、课题方案
(一)、课题研究的主要内容
1、主要研究内容
⑴ 爬楼机器人的原理研究和机械结构的设计。要求机器人能在平地行驶,
攀爬通常规格的楼梯,转弯,以及具备一定的避障能力。
⑵ 对其运动过程分析,提取出爬楼机器人关键动作,运用运动学和动力学
理论分别进行了运动学(运用Matlab进行仿真)和动力学分析,最后对爬楼机器人进行静态稳定性分析。
⑶ 使用三维实体造型软件Pro/E建立了爬楼机器人的三维实体模型, 然后将Pro/E导出的模型导入ADAMS软件中,定义刚体,添加约束、力、运动等,完成爬楼机器人的虚拟样机的机械系统模型。
⑷ 针对六轮腿移动机器人越障行为进行了仿真,对机器人机构设计进行优化。
⑸ 控制系统的设计。使机器人能够自动转弯、与楼梯栏杆(或墙壁)保持一定距离、避开跨越不了的障碍。
2、关键技术及难点
⑴爬楼机器人的设计与优化
⑵运动学分析与仿真
⑶虚拟样机的机械系统模型的建立
⑷控制系统的设计
3、爬楼机器人结构的基本原理
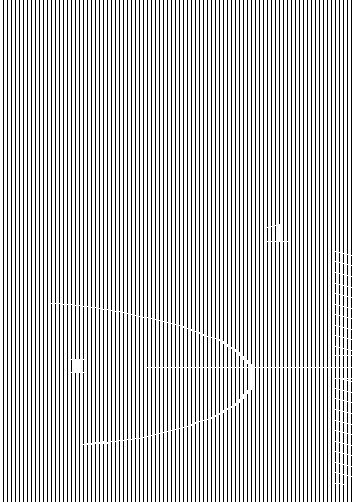
轮子的机械原理如图1所示:Ⅰ、Ⅱ、Ⅲ为轴,1为基本构件,2为太阳轮,3、4为行星轮, 5为行星架(即转臂),6为小车轮,动力电机传到Ⅰ轴,Ⅰ轴带动太阳轮2转动,太阳轮带动行齿轮3转动,再传给4,机器人前进。当车轮组机构运行在平直的路面上时,受两个车轮同时着地的约束限制,转臂5不能转动只能随车沿路面平动,此时驱动轮系演变成定轴轮系,实现机构在平直面上的快速行驶;当前进的车轮碰上高障碍(如楼梯)而停止不动时,驱动轮系就演变成行星轮系,转臂5带着另外4个车轮绕前轮的轴线回转,实现翻越障碍(即爬楼梯)的目的。其自由度F=3n-2PL-PH=3×4-2×4-2=2 其中n为除机架外的构件,PL为n个活动构件之间的低副, PH为n个构件之间的高副。 8
图1 机器人原理图
4、爬楼机器人的机构设计
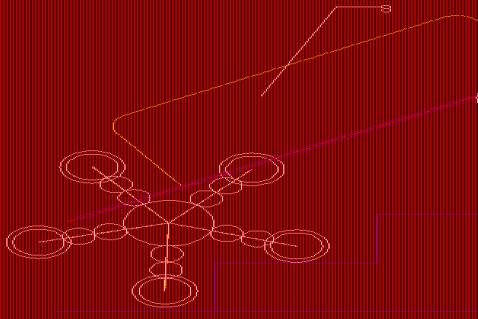
根据原理图和爬楼梯的要求设计了爬楼机器人机构简图,如图2。
整个机构设有四个电机,每个电机负责给一个行星轮机构提供动力。电机传递动力给太阳轮所在传动轴的,再通过齿轮之间的相互啮合来传递动力,最终将动力传递给小车轮,实现平直路面上的行驶。当遇到小障碍物时,行走机构立即演变成行星轮机构,直接跨越。当遇到在攀登范围内的大障碍(楼梯)时,机构一直以行星轮机构作用,达到攀登的目的。当遇到攀登范围之外的障碍,要求机器人转向时,通过控制左右两个电机的转速快慢来实现。
9
图2 机器人机构简图
1、楼梯 2、小车轮 3、4传动齿轮 5、行星轮 6、太阳轮
7、行星架(转臂) 8、车架
(二)、研究目标及创新
爬楼机器人要求具有在平面行驶和爬楼梯的功能,当然也具备转向避障和良好的行走线性轨迹。本机构具有如下特点:1)能够实现在平直路面上的轮式快速移动,且跨越一定高度的障碍;2)无需传感装置来检测允可范围(除不可攀越的障碍物)的障碍;3)平面运动和越障运动之间的转换取决于路面对小车轮的作用力情况,无需复杂的辅助机构来协同定成,机构实现简单。
三、可行性分析
行星轮系是由太阳轮(几何轴线固定的齿轮)、行星轮(随行星架绕主轴线回转的构件)、行星架(支持行星轮且能承受外力矩的构件)构成的。本课题研究的爬楼机器人基本原理如图1,从机构分析,运用差动轮轮系传动比的
10
相关公式,可以得出如下关系式:
?2??5
?4??5?Z4Z2
其中,?2为中心齿轮2的转速;?5为转臂5的转速;?4为驱动齿轮4的转速;
Z2为中心齿轮2的齿数;Z4为驱动齿轮4的齿数。 ?2?4Z4Z2?5当驱动轮系为定轴轮系时,=0,所以/=/,车轮6与中心齿
?4轮2具有相同的旋向。当驱动轮系为行星轮系时,
转臂的旋向必须和中心齿轮的旋向相同,所以?2/?5?0,即Z2
取得较大值时,可以提高车轮组的越障能力。 ?=0,所以?2/?5=1-Z4/Z2,在电机旋向不变的情况下,要使整个车轮组继续往前运动,Z4。当Z2?Z4
对机器人的运动学分析是采用整车为研究对象,找出爬楼的最大坡度,来优化行星轮、太阳轮及行星架的尺寸比,并且运用Matlab对其仿真。 Matlab(Matrix Laboratory)是一种高度集成化的科学计算环境,是集数值计算和图形处理等功能与一体的工程计算及数值分析软件。Matlab现有30多个工具箱,Simulik工具箱就是其中应用广泛,影响较大的一个。它是一个用来进行动态系统建模、仿真和分析的集成软件包。不仅可以进行线性系统仿真,也可进行非线性系统仿真,既可以实现连续时间系统仿真,也可以实现离散时间系统甚至连续-离散时间系统的仿真,还支持多制式采样率的系统仿真。利用Matlab可以分析出结构的运动轨迹、速度、加速度。
ADAMS是虚拟样机分析的应用软件,用户可以运用该软件非常方便地对虚拟机械系统进行静力学、运动学和动力学分析。用户使用ADAMS软件,可以自动生成包括机、电、液一体化在内的、任意复杂系统的多体动力学数字化虚拟样机模型,能为用户提供从产品概念设计、方案论证、详细设计、到产品方案修改、优化、试验规划甚至故障诊断各阶段、全方位、高精度的仿真计算分析结果,从而达到缩短产品开发周期、降低开发成本、提高产品质量及竞争力的目的。通过Pro/E导出的模型导入ADAMS软件中,定义刚体,添加约束、力、运动等,完成爬楼机器人的虚拟样机的机械系统模型。
电机使用单片机进行控制,通过编码器构成反馈系统;在机器人两侧装上激光测距扫描仪,保证机器人与楼梯的在安全距离范围,通过单片机不断采集信号,用PID控制电机速度,修正其轨迹;在机器人前端大于越障范围处安装 11
激光测距仪,使机器人原速返回另择路径。
四 、课题进度安排
1 、20xx年03月~20xx年10月:确定课题题目及研究的内容,收集资料,
查阅文献,做前期基础工作
2 、20xx年10月~20xx年12月:撰写开题报告,开题答辩
3 、20xx年12月~20xx年06月:课题研究实施阶段,完成主要内容 4 、20xx年06月~20xx年10月:撰写论文
5 、20xx年11月;完善论文,论文答辩 。
五 、参考文献
[1] 蔡自兴编著.机器人学.北京:清华大学出版社,2000
[2] Robin R. Murphy Introduction to AI Robotics 电子工业出版社,2004
[3] 蔡自兴 21世纪机器人技术的发展趋势 南京化工大学学报 2000.7
[4] 国家863计划智能机器人专家组.机器人博览.中国科学技术出版社,2001
[5] 梁斌,王巍,王存恩.未来我国发展月球车的初步构想.中国航天,2003
[6] 蔡鹤皋.机器人将是21世纪技术发展的热点.中国机械工程第11卷.2002.2
[7] 罗志增,蒋静坪.机器人感觉与多视觉融合.北京:机械工业出版社,2002.6
[8] 张海洪 龚振邦. 具有越障功能的全方位移动机构研究. 高技术通讯,2001
[9] 蔡改贫 吴光华 欧阳田. 越障机器人运动学分析与仿真.江西有色金属,2008.3.
[10]李贻斌,刘明,周风余.移动机器人多超声传感器信息融合方法.系统工程与电子技术,1999;21(9):55--57
[11] 张骏 杨杰 杜华生 吴月华 吴建兵. 关于SMA微小型越障机器人越障过程中本体位姿控制的研究. 中国科学技术大学学报,1998.6.
[12] 王德新 王付锐 董二宝 宋轶群 杜华生 杨杰. 自主越障机器人在非结构化环境下的越障控制研究.制造业自动化.2005.7.
[13] 汪增福 关胜晓 曹洋. 一种主动适形越障机器人的设计与特性分析.计算 机仿真.2007.4.
[14] 陈慧宝 李婷 徐解民. 关节式履带机器人的爬梯性能研究. 电子机械工程.2006.11.
[15] 肖俊君 尚建忠 罗自荣. 一种多姿态便携式履带机器人传动和结构设计. 机械设计,2007.3
12
[16] 庞涛 尹志强 朱华炳 柳欣. 爬楼梯小车控制系统的研制. 合肥工业大学学报,2006.9
[17] 唐鸿儒 宋爱国 章小兵. 基于传感器信息融合的移动机器人自主爬楼梯技术研究. 传感技术学报,2005.12.
[18] 苏和平 王人成. 一种双联星形轮机构电动爬楼梯轮椅的设计.中国临床康复.2005.7.
[19] 苏和平 王人成. 爬楼梯轮椅的研究进展.中国康复医学杂志.2005.5.
[20] 乔风斌 杨汝清. 六轮移动机器人爬楼梯能力分析. 机器人.2004.7.
[21] 武明 项海筹 张济川. 新型爬楼梯轮椅稳定性的灵敏度分析. 甘肃工业大学学报.1998.3.
[22] 范明聪 吴月华 杨杰. 高机动性越障机器人运动学分析与轨迹控制研究.光学精密工程.2004.6.
[23] 康玉辉. 基于虚拟样机技术的六轮腿移动机器人研究. 南京理工大学硕士学位论文.2007.
[24] 白琨. 履带式移动机器人越障能力的研究. 内蒙古工业大学硕士学位论
文,2007.
[25] 陆丰勤. 多功能爬楼梯装置的研究及控制系统的设计. 南京理工大学硕士
学位论文,2008
[26] 李天庆. 基于多传感器融合的机器人自主爬楼梯研究,合肥工业大学硕士学位论文,2008
[27] 瞿亮.基于NATLAB的控制系统计算机仿真.北京.北京交通大学出版社.2006
[28] 刘金馄.先进PID控制及其MATLAB仿真.北京.电子工业出版社2003
[29] 王正林,王胜开,陈国顺.MATLAB/Simulink与控制系统仿真.北京.电子工业出版社.2005
[30] 苏金明,王永利.MATLAB 7.0实用指南.北京.电子工业出版社.2004
[31] 方建军,刘仕良.机械动态仿真与工程分析.北京.化学工业出版社.2004
[32] 霍伟.机器人动力学与控制.北京.高等教育出版社.2005
[33] 李增刚.ADAMS入门详解与实例.北京.国防工业出版社.2006
[34] 陈立平.机械系统动力学分析及ADAMS应用教程.北京.清华大学出版社. 2005 .
13
[35] Zahed Siddique, David W Rosen. A virtual Prototyping approach to Product disassembly reasoning. Computer Aided Design,1997(12):29
[36] Valasek M.Software Tools for Mechatronic Vehicles . Design Through Modeling and Simulation.Vehicle System Dynamics
Supplement.l999(33):214一230
[37] J.Larsson,P.Krus.Modelling, simulation and validation of complex
fluid and Mechanical systems .International ADAMS User
Conference .1998
[38] MOHSEN M. DALVAND AND MAJID M. MOGHADAM, Stair Climber Smart Mobile Robot (MSRox), Tarbiat Modares University of Iran, Iran.2006.
[39] ROEMI FERNANDEZJOAO HESPANHA, Nonlinear Control for the Dual Smart Drive Using Backstepping and a Time-Optimal Reference,
IAI/CSIC-Industrial Automation Institute.2005.
[40] Takashi Kubota1, Yasuharu Kunii, Yoji Kuroda and Working Group, Japanese lunar robotics exploration by co-operation with lander and rover, Chuo University,Meiji University.2005.
[41] Ashish Deshpande · Jonathan Luntz, Behaviors for physical cooperation between robots for mobility improvement, University of Michigan,2007.
[42] Toshihiko Mabuchi ,Takeshi Nagasawa , Keizou Awa . Development of a stair-climbing mobile robot with legs and wheels, Kansai University,1998.
[43] Hyun Do Choi · Chun KyuWoo · Soohyun Kim · Yoon KeunKwak · Sukjune Yoon, Independent traction control for uneven terrain using stick-slip phenomenon: application to a stair climbing robot, Korea
AdvancedInstitute of Science and Technology,2007.
[44] R. Morales · A. Gonzalez · V. Feliu · P. Pintado---Environment adaptation of a new staircase-climbing wheelchair,University of Castilla-La Mancha,2007.
14