毕业设计开题报告
遥操作机器人的时延控制
日期:20xx年 1月 13日
一、课题研究背景
1.1、遥操作机器人系统概述
遥操作机器人系统由操作者、主端机器人子系统、通信环节、从端机器人子系统和工作环境组成。操作者指令通过主端机器人、通信环节和从端机器人作用于环境,对环境的感知信息则经过上述环节返回到主端操作者,使主端操作者有身临其境的感觉,从而有效完成操作任务。遥操作系统能将人所在的主端的命令和行为传到并作用在远端,实现对远端环境的期望的操作和控制,从而极大地提高操作者的安全性和工作效率,节俭成本,更高效合理地利用人力资源,实现多方协调作业等[1]。
最早的遥操作系统用于地面平台对太空设备的控制上[2],由于电磁波传播速度及信号收发处理方面等的局限性,遥操作系统往往存在比较大的时延。这些时延会给系统的知觉感受和操作性能带来极大影响,于是在原有遥操作系统上,就逐步增加了力反馈信号。然而,这虽然提高了遥操作系统的操作性能,但是由于时延的存在,系统的稳定性受到了影响。因此,控制器的设计除了要保证系统的稳定性外,还要克服时延的影响。
1.2、遥操作机器人的研究意义
遥操作不同于遥控,它在人控制远方机器人的同时,又必须得到机器人在“知觉”上的反馈。实现机器人在“知觉”上反馈的办法,就是使用临场感技术。临场感技术是以人为中心,通过各种传感器将远地机器人与环境的交互信息(包括视觉、力觉、触觉、听觉、运动觉等)实时地反馈到本地操作者(人)处,生成和远地环境一致的虚拟环境,使操作者产生身临其境的感受,从而实现对机器人带感觉的控制,完成作业任务[4]。事实上,在应用了临场感技术的遥操作机器人系统中,对于操作者来说,意味着他将“沉浸”在远地环境中。这样,遥操作机器人系统就可以代替人类完成远程环境和危险环境下的任务,保护人类的安全。在空间探索中,它可以完成卫星修理,空间站维护,月球、火星等行星的勘探等任务;在海洋开发中,它可以完成海洋资源调查,深海打捞,水下电缆修理,海洋钻井平台维护,海底考古等任务;在军事领域,它可以完成战场调查、防化、扫雷、救护等任务;在民用领域,它可以完成核电站维修、远程医疗、远程教育、远程科学实验等任务。总之,遥操作机器人的应用使人摆脱了传统操作者的角色,[3]
由直接操作变成了遥操作。
二、国内外研究状况
2.1、遥操作机器人发展历程
上个世纪四十年代,Fermi领导他的团队在 Argonne 国家实验室进行核试验,由于核材料放射性强,对人体危害大,为解决核废料的处理问题。1948 年,世界第一个遥操作系统由 Goertz 在国家实验室研制成功。1954 年,Goertz 设计了第一台电子程序可编的工业机器人是一个带伺服反馈的机电遥操作系统[5],由操作者对车辆进行远程控制,操作性能得到很大改善。后来从动力学和运动学角度设计的双向控制方法的引入,使得设计适合于人手使用的操纵杆成为现实,大大减轻了操作者的负担。20 世纪 80 年代对智能机器人的研究表明,由于机构、控制、人工智能和传感技术水平的限制,在短时间内尚难研制出能在未知或复杂环境下工作的全自主式智能机器人。90 年代以来,Internet 得到了迅速发展,已经联系超过 160 个国家和地区,4万多个子网、500多万台电脑主机,直接的用户超过 4000 万,成为世界上信息资源最丰富的电脑公共网。将Internt技术被引入遥操作机器人领域,将其作为遥操作系统的通讯环节,由于 Internet 引入系统会产生变化的随机的时延会影响系统的稳定性和可操作性。因此,由 Internet引起的变化的、随机的时延问题成为学者研究基于网络的遥操作机器人必须攻克的一个难题[6]。
2.2、时延控制方法的研究现状
早在19xx年就有学者讨论了遥操作机器人系统中的通信时延问题,但是当时没有考虑力反馈,所以存在不稳定的问题。随后又有人提出“移动—等待”的策略来解决不稳定问题。但是这种方法降低了系统工作带宽,这不仅使力反馈信息模糊,而且给操作者带来极大负担,操作者容易疲劳。随着空间技术和海洋技术的发展,通信时延对具有遥操作机器人的影响越发受到重视[8]。许多国家的学者对这一问题进行了探索,目前主要形成了以下几种方法:
2.2.1、基于电路网络理论的无源控制法:
这种方法由Raju在19xx年首先提出。他将遥操作系统与电路网络进行类比,用二端口网络理论分析遥操作系统。通过分析发现,造成系统不稳定的原因在[9][7]
于通信时延造成了传输线的有源性。要解决系统的稳定性问题,关键是要使传输线具有无源性。
2.2.2、基于现代控制理论的控制算法
加拿大多伦多大学的Strassberg和Goldembeng等人则利用现代控制理论中的李雅普诺夫稳定性判据分析遥操作系统的稳定性[10]。Lawrence提出了“无缘距离”和“透明距离”的概念。Leung和Francis等人利用这些概念的综合评价法设计遥操作系统[11]。
2.2.3、基于虚拟现实技术的控制结构和控制算法
基于电路的理论,在长时延的情况下,不能在保证稳定性的同时又具有很好的操作性。而现代控制理论又不甚完善,这使基于现代控制理论的方法又很多问题不能解决。因此,许多研究者将虚拟现实技术应用于遥操作机器人系统。虚拟现实是一种可以创建和体验虚拟世界的多传感融合与多媒体集成的计算机系统。人们可以利用该计算机系统生成某种虚拟环境(如宇宙空间、水下等作业环境), 借助各种传感设备使操作者“投入”到该环境中, 实现操作者与该环境的直接自然交互[12]。这种克服时延的方法,不但解决了稳定性,而且使系统具有很好的操作性。
2.2.4、基于事件的控制算法
在遥操作系统中,如果延时过大或者是随机的或不可预测,如网络遥操作系统,传统方法很难达到效果,这时学者们引入了基于事件的控制算法[13]。这种理论的基本点在于引入一个不同于时间的新的运动参变量,该变量随控制过程的进行而更新,实时的传感信息是这种更新的依据。系统的理想输出是此参梁的函数,在系统运行过程中,通过规划器实时修正系统的目标输出值,使得系统运动规划过程成为实时过程,具有自适应的特性,并有利于得到优良的控制效果[14]。基于事件的方法由于采用了非时间基的时钟来推动整个的运动,从而巧妙地绕开了信息传输的不确定时延并保证了系统的稳定性。
三、研究内容
3.1、课题研究目的
本课题将研究遥操作机器人时延控制的特点,提出系统设计原则和方案;并以此为基础,设计一种遥操作机器人时延控制算法,运用仿真软件搭建系统模型,
进行系统仿真实验。
3.2、遥操作机器人系统体系结构
遥操作机器人系统由操作者、主端机器人子系统、通信环节、从端机器人子系统和工作环境组成。它的系统构成图如图1所示:
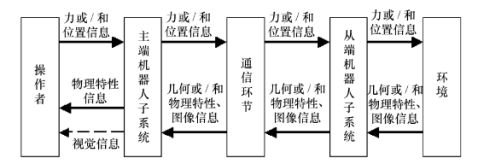
图1:遥操作机器人系统体系结构
3.3、遥操作机器人系统的模型
遥操作机器人的系统的动力学模型如下:
(1)主端机器人子系统模型:
.
fh?Mmvm?Bmvm?udm
(2)从端机器人子系统模型:
ud?Msv?Bsvs?fe .
(3)环境:
fe?Mev?Bevs?Ke?vsdt .
3.4、基于二端口网络的控制方案
将遥操作系统与电路系统进行类比,用二端口网络的方法研究遥操作系统。只要保证传输线的无源性,就可以保证系统的稳定性。
3.4.1、二端口网络
如果有两对端子满足端口条件,即对于所有时间t,从端子1流入方框的电流等于从端子1' 流出的电流;同时,从端子2流入方框的电流等于从端子2' 流出的电流,这种电路称为二端口网络。用二端口概念分析电路时,仅对二端口处
的电流、电压之间的关系感兴趣,这种相互关系可以通过一些参数表示,而这些参数只决定于构成二端口本身的元件及他们的连接方式。一旦确定表征这个二端口的参数后,当一个端口的电压、电流发生变化,要找出另外一个端口上的电压、电流就比较容易了[15]。
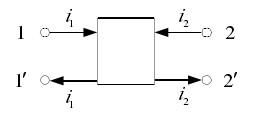
图2:二端口网络
3.4.2、二端口网络的有源性和无源性
无源性:对一个N 端口网络,若在任何时刻t0和任何t ≥ t0时刻,对于所有容许的信号 V (t )和 i (t )来说,储存和供应到该网络的能量,在所有的时间t均为非负值,即:
E(t)?E(t0)??t
t0V'(x)i(x)dx?0
则该网络就是无源网络。无源网络是任何时候都不能释放出能量的。
有源性:一个N 端口网络,当且仅当对于某一激励,某一时刻初始时间t0和任何t0 ≥ t时刻的某一时间有下列关系,即:
E(t)?E(t0)??t
t0V'(x)i(x)dx?0
则该网络就是有源网络。有源网络可以释放出能量。
四、毕业设计总体进度安排
20xx年11月 查阅相关文献资料及学习相关知识。
20xx年12月 撰写开题报告、文献阅读报告。
20xx年3-4月 设计整个遥操作机器人时延控制器的算法。
20xx年5月 利用matlab软件进行系统仿真模拟。
20xx年6月 撰写毕业论文。
参考文献:
[1] 景兴建, 王越超, 谈大龙. 遥操作机器人系统时延控制方法综述 [ J]. 自动化学报,2004,30(2): 214-223.
[2]Shemdan T B. Space teleoperation through time delay: Review and prognosis. IEEE Transactions on Robotics and Automation , 1993.9(5):592~606
[3]Ferrell W R. Remote manipulation with transmission delay . IEEE Transactions on Human Factors in Electronics . 1965,HFE-6(1)
[4]刘寒冰 赵丁选. 临场感遥操作机器人综述 [J]. 技术应用,2004,1:42-45
[5]Hashtrudi-Zaad, Design、implementation and evaluation of stable bilateral tele- operation control architectures for enhanced tele-presence. Ph. D dissertation. The University of British Columbia. 2000.
[6]宋娟. 网络遥操作机器人的时延控制:[硕士论文],长春:吉林大学,2009
[7]FerrelWR. Delayed force feedback[ J]. IEEE Trans. on Human Facors, 1966, 9(5): 449-454.
[8]陈俊杰. 空间机器人遥操作克服时延影响的研究进展 [J]. 测控技术,2007,26(2):1-7
[9]Raju G. Design issue in 2-port networks models of bilateral remote manipulation[J]. IEEE Trans on Auto-Control , 1989,34(3):1316-1321
[10]Strassbrg Y , Goldenberg A A, Mills T K A new control scheme for bilateral teleoperating system: lyapunov stability analysis[A]. Proc of the IEEE Int Conf on Rob and Auto [C]. Nice, France, 1992: 837-842
[11]Lawrence DA. Stability and transparency in bilateral teleoperation[J]. IEEE Trans. on Rob. and Auto. , 1993, 9(5): 624-637.
[12]李华忠,梁永生,洪炳熔. 基于虚拟现实的无时延感空间机器人遥操作研究 [J]. 计算机应用研究, 2008,11(25):3404-3407
[13]Elhagg I, Xi Ning, Liu Yun Hui. Real-time control of internet based teleoperation with force reflection. In:Proceedings of the IEEE International Conference on Robotics and Automation. San Francisco, CA:2000,3284-3289
[14]Xi N, Tarn T J. Action synchronization and control of internet based telerobotic systems. In:Proceedings of the IEEE International Conference on Robotics and Automation. Detroit, Michigan:1999.2964-2969
[15]邱关源,罗先觉. 电路(第五版)高等教育出版社,2006,5(2009重印):418-419
第二篇:搬运机器人毕业设计开题报告
广东技术师范学院
毕业设计(论文)开题报告
 题目4-DOF搬运机器人的结构设计
题目4-DOF搬运机器人的结构设计
专 业 名 称 飞行器动力工程

班 级 学 号

学 生 姓 名

 指 导 教 师
指 导 教 师
填 表 日 期 20## 年 10 月 28 日
一、选题的依据及意义:
传统的工业机器人常用于搬运、喷漆、焊接和装配工作。工业现场的很多重体力劳动必将由机器代替,这一方面可以减轻工人的劳动强度,另一方面可以大大提高劳动生产率。搬运机器人是可以进行自动化搬运作业的工业机器人。最早的搬运机器人出现在1960年的美国,Versatran和Unimate两种机器人首次用于搬运作业。搬运作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。目前世界上使用的搬运机器人逾10万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。部分发达国家已制定出人工搬运的最大限度,超过限度的必须由搬运机器人来完成。搬运机器人是近代自动控制领域出现的一项高新技术,涉及到了力学,机械学,电器液压气压技术,自动控制技术,传感器技术,单片机技术和计算机技术等学科领域,已成为现代机械制造生产体系中的一项重要组成部分。它的优点是可以通过编程完成各种预期的任务,在自身结构和性能上有了人和机器的各自优势,尤其体现出了人工智能和适应性。
应用搬运机器人进行工作,这是直接减少人力的一个侧面,同时由于应用搬运机械人可以连续的工作,这是减少人力的另一个侧面。因此,在自动化机床的综合加工自动线上,目前几乎都有搬运机械手,以减少人力和更准确的控制生产的节拍,便于有节奏的进行工作生产。
可见,有效的应用搬运机械手,是发展机械工业的必然趋势机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段,国内外都很重视它的应用和发展。搬运机器人是典型的机电一体化数字化装备,技术附加值很高,应用范围很广,作为先进制造业的支撑技术和信息化社会的新兴产业,将对未来生产和社会发展起越来越重要的作用。
二、国内外研究概况及发展趋势:
(1)国内现状及发展趋势
工业机械手是近几十年发展起来的一种高科技自动化生产设备。机器人的分类方法有多种, 按其应用可分为:工业机器人、军用机器人、农业机器人、服务机器人、水下机器人、空间机器人和娱乐机器人。搬运机械人的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性,如图1、图2的搬运机器人。机械手作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。


图1. 搬运机器人 图2.六自由度机器人
搬运机械手是在机械化,自动化生产过程中发展起来的一种新型装置。在现代生产过程中,搬运机械手被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术邻域内,迅速发殿起来的一门新兴的技术,它更加促进了搬运机械手的发展,使得搬运机械手能更好地实现与机械化和自动化的有机结合。搬运机械手虽然目前还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,搬运机械手已受到许多部门的重视,并越来越广泛地得到了应用
国内搬运机械手的发展趋势主要可以概括为以下几点:
①搬运机械手性能不断提高(高速度、高精度、高可靠性、便于操作和维修),而单机价格不断下降。
②机械结构向模块化、可重构化发展。例如关节模块中的伺服电机、减速机、检测系统三位一体化:由关节模块、连杆模块用重组方式构造搬运机械手整机;国外已有模块化装配搬运机械手产品问市。
③搬运机械手的控制系统向基于PC机的开放型控制器方向发展,便于标准化、网络化;器件集成度提高,控制柜日见小巧,且采用模块化结构:大大提高了系统的可靠性、易操作性和可维修性。
④搬运机械手中的传感器作用日益重要,除采用传统的位置、速度、加速度等传感器外,搬运机械手还应用了视觉、力觉等传感器,
⑤虚拟现实技术在搬运机械手中的作用已从仿真、预演发展到用于过程控制如使遥控机械手操作者产生置身于远端作业环境中的感觉来操纵搬运机械手。
(2)国外现状及发展趋势
现代国际工业中,生产过程的机械化,自动化已成为突出的主题。因此其各种生产流水线以及物流管理中更是多元化的使用着气动机械手,如图3。其中化工等连续性生产过程的自动化已基本得到解决。但在机械工业中,加工、装配等生产是不连续的。因此,装卸、搬运等工序机械化的迫切性,搬运机器人就是为实现这些工序的自动化而产生的。搬运机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件。国外机械手工业、铁路工业中不仅在单机、专机上采用机械手上下料如图4,减轻工人的劳动强度。并和机床共同组成一个综合的数控加工系统。采用搬运机械手在流水线进行生产更是目前研究的重点,国外已研究采用摄象机和力传感装置和微型计算机连在一起,能确定零件的方位达到准确搬运的目的。
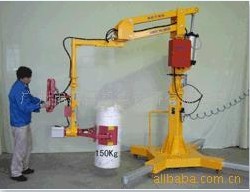
图3.气动搬运机械手

图4.自动上下料机械手
国外搬运机械手的发展趋势是大力研制具有某种智能的搬运机械手。使它具有一定的传感能力,能反馈外界条件的变化,作相应的变更。视觉功能即在搬运机械手上安装有电视照相机和光学测距仪(即距离传感器)以及微型计算机。
触觉功能即是在机械手上安装有触觉反馈控制装置。工作时机械手首先伸出手指寻找工作,通过安装在手指内的压力敏感元件产生触觉作用,然后伸向前方,抓住工件。
总之,随着传感技术的发展机械手装配作业的能力也将进一步提高。更重要的是将搬运机械手、柔性制造系统和柔性制造单元相结合,从而根本改变目前机械制造系统的人工操作状态。
三、研究内容及实验方案:
(1)主要研究内容
本文研究了国内外机械手发展的现状,通过学习机械手的工作原理,熟悉了搬运机械手的运动机理。在此基础上,确定了四自由度搬运机械手的基本系统结构,对搬运机械手的运动进行了简单的力学模型分析,完成了机械手机械方面的设计(包括传动部分、执行部分、驱动部分)和简单的三维实体造型工作。
(2)主要实验方案
①根据系统的要求,选择机器人的坐标形式;
②确定驱动系统的类型;
③确定四自由度机器人的结构设计方案,进行力学校核;
④选择各部件的具体结构,进行机器人总装图的设计;
⑤绘制机器人的零件图,并确定尺寸;
⑥运用三维软件完成三维实体造型工作。
四、目标、主要特色及工作进度
(1)本课题研究的目标
以4-DOF SCARA机器人为研究对象,基于三维软件完成4-DOF SCARA机器人的结构设计及运动模拟。
要求机器人手爪最大负载能力是1.0kg
各轴运动范围为:0~360°,0~200°,0~200mm,0~200°
各轴最大运动速度≤1.8rad/s
(2)本课题需要解决的问题
完成4-DOF搬运机器人的结构设计,进行力学分析校核确保机器人工作的可靠性;画出机器人的各个零件图,同时运用三维软件画出实体图。
(3)主要特色
本设计的特色就是设计一个小型气动搬运机器人,应用于工业自动化生产线,把工业产品从一条生产线搬运到另外一条生产线,实现自动化生产,减轻产业工人大量的重复性劳动,同时又可以提高劳动生产率。
(4)计划和工作进度
①查阅相关资料,外文资料翻译,撰写题报告 2.20~3.15 4周
②相关外文文献资料的阅读与翻译(6000字符以上) 3.15~3.29 2周
③总体传动方案设计 3.29~4.13 2周
④零部件的结构设计 4.13~5.7 3周
⑤零部件的强度计算与校核 5.7~5.23 2周
⑥撰写毕业论文 5.23~6.6 2周
⑦毕业设计审查、毕业答辩 6.6~6.20 2周
五、参考文献
【1】马光 申桂英.工业机器人的现状及发展趋势[J].组合机床与与自动化加工技术,2002(3)
【2】曾孔庚.工业机器人技术发展趋势[J].机器人技术与应用, 2006, (06)
【3】杜志俊.工业机器人的应用及发展趋势[J].机械工程师, 2002(5)
【4】唐立平. 基于PLC的四自由度机械手控制系统设计[D]. 江苏: 无锡职业技术学院, 20##年
【5】陈忠华. 可编程控制器与工业自动化系统. 机械工业出版社[M], 20##年
【6】彭坚. 气动机械手及其PLC控制系统的设计与实现[J]. 通用机械, 2004. 7(2):1 -7
【7】王巍, 汪玉凤. 基于PLC气动机械手研究[J]. 辽宁工程技术大学学报, 2005, 1(06): 55-68
【8】孙树栋主编.工业机器人技术基础[M]. 西安:西北工业大学出版社,20##年
【9】吴振彪主编.工业机器人[M]. 武汉:华中科技大学出版社,20##年
【10】谢存禧 张铁主编.机器人技术及其应用[M]. 北京:机械工业出版社,20##年
【11】G L Batten. Programmable Logical Controllers: hardware, software and applications. Mc Graw-Hill. 1994
【12】SIEMENS AG. SIMATIC S7-200 Programmable Controller System Manual.2004
【13】Gao F,Li W M.New kinematic strctures for 2-,3-,4-,and 5-DOF parallel manipulator designs.Mechanism and machine Theory,2002,37:1395~1411
【14】Zlatanov D,Gosselin C M. A familiy of new parallel architectures with four degrees of freedom.Journal of Compulational Kinematics,2001(5):57~66
【15】GASPARETTO A, ZANOTTO V. A new method for smooth trajectory planning of robot manipulators[J]. Mechanism and Machine Theory, 2007, 42(4): 455–471