开放性实验
机构创新设计拼装及仿真实验报告
指导教师:
班级:
姓名:
学号:
学院机械工程系
开放性实验 机构创新设计拼装及仿真实验报告
班 级: 姓名: 学 号:
实验日期: 实验地点: 指导教师: 成绩:
一、必选机构的拼装及仿真
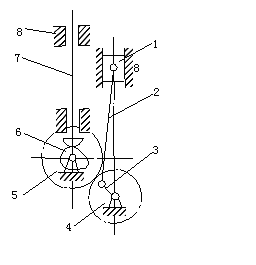
(一)机构名称 颚式破碎机
1、绘制机构运动简图

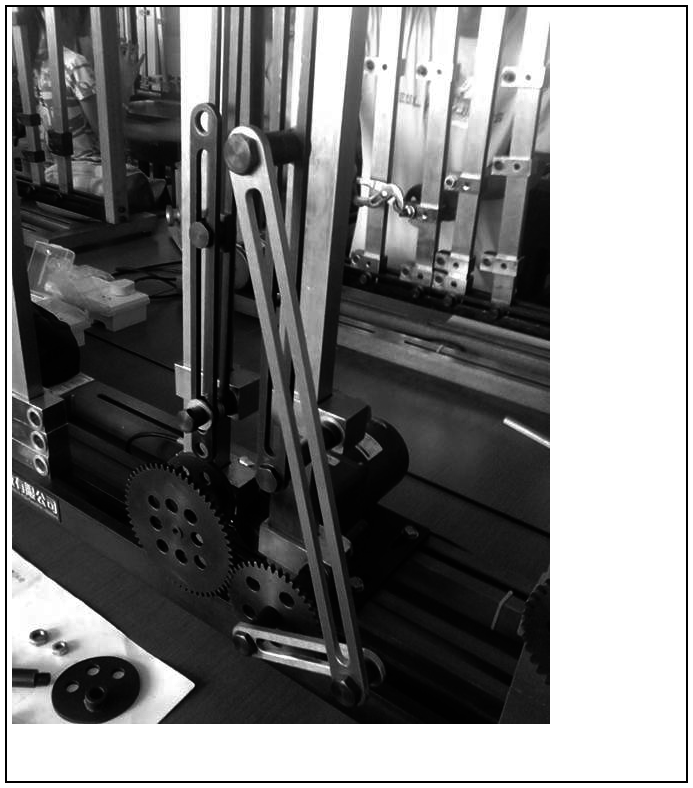
2、机构拼装完成图片

3、机构的自由度计算
活动构件数目n= 5 低副数目PL= 7 高副数目PH=0
机构的自由度F=3n—2PL—PH
=3*5-2*7-0
=1
4、进行机构分析
二、自选机构的拼装及仿真
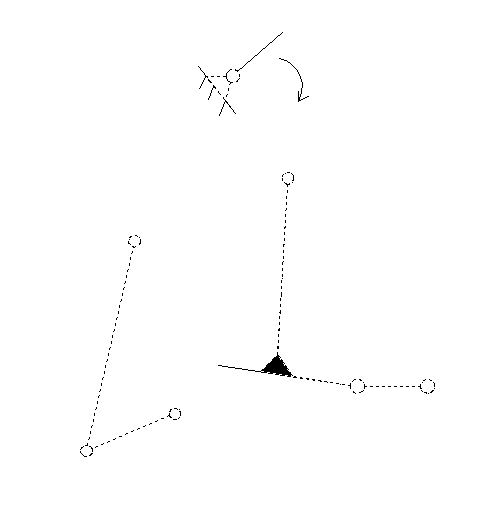
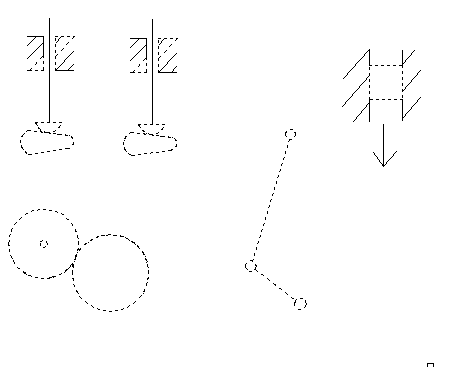
(二)机构名称内燃机机构简图
1、绘制机构运动简图
3、机构的自由度计算
活动构件数目n= 6 低副数目PL= 7 高副数目PH=3
机构的自由度F=3n—2PL—PH
=3*6-2*7-3
=1
4、进行机构分析
2、机构拼装完成图片
5、在机构拼装过程遇到的哪些问题,如何解决?对本开放性实验的心得、体会和建议。
在机构拼装过程中经常会找不到合适的连接件来拼接不同的构件,或者由于构件精确的位置无法计算得出而得不到令人满意的运动效果,这时候往往就需要同组的同学密切配合才能攻克上诉难题,由此我深深体会到组员之间默契的配合对于完成一次拼装是多么的重要。
第二篇:机器人创新设计实验报告
机器人创新实验(1)报告
摘要
机器人作为20世纪人类最为伟大的发明之一,自60年代问世以来,经历40余年的发展已经取得长足的进步。近年来随着社会的进步和科学技术的迅猛发展,特别是在微电子技术、信息技术,计算机技术,材料技术等科学技术迅速的支持下,机器人的种类日益繁多,性能不断改进,工作领域也在不断地扩大。已经引起了各国科学家的普遍关注。许多发达国家均把机器人技术的开发,研究列入高新技术发展计划。并且已经取得了很大的进展,它的成果将成为各行各业提高生产力的强有力的工具。此机器人是针对目前交通事故频发设计的。利用三轮作为活动方式,通过三个传感器进行感应障碍识别,从而进行控制汽车的运动及时避免各种障碍物。从电影<<机械公敌>>里可以看到机器人的前景,以及注意机器人的弊端。
关键词:
机器人,工具,传感器,障碍物
一、实验目的
1、在保证整个稳定的前提下,将程序写入控制卡,熟悉
软件调试机器人运动步态的技巧,熟悉直流电机的控制,并实现提前设定好的动作步骤,并使机器人能够平稳的运动。
2、熟悉掌握各种搭建元件的使用方法和电机舵机的使用技巧
3、学会对学习知识的应用到实际中的能力,提高自身动手能力。
二.实验器材
探索者,电脑软件TKScop,
我们用到的探索者:
三.组员
项博、张君心、刘小龙
三、实验步骤
1.第一阶段:老师对我们介绍实验内容,对需要用到的配件、软件环境进行讲解,为使我们对实验内容更加熟悉,对软件环境的熟悉。
2.第二阶段:开始动手阶段,为了能使我们小组更好的完成创新实验课程,我们机器人模仿机器人案列制造了简单的机器人,其中有一些改动。
第二阶段成品展示
3.第三阶段:开始创新阶段,在第二阶一定经验的基础上,我们对其进行了创新和改组。其中包括前轮和驱动装置,还有传感器的数量,主要对机器小车的CPU内部的程序进行了修改,让其实现了第二阶段没有实现的动作。
第三阶段成果
4.第四阶段:老师评价,总结成功与失败。
四、机械结构、控制接线方法、程序、程序流程图说明:
控制线接线方法:
1、2、3、4为传感器接口
5红外接收端口
6手柄ABC三通道的选择键
7程序写保护,on允许下载
反之不允许,如果要运行板载程序,则转换到非on 状态
8为程序下载接口,连接usb转串口线

9舵机接口,共六组。可接标准舵机和圆周舵机。舵 机黑色线朝下,三针,最上针空余。10输出端口,共2组,可接LED灯和语音模块
11电池接口或电源接口。 程序:#include "config.h" #include "lib_io.h" #include "lib_arm.h"
int main(void)
{
Initial_ARM(); while(1) { if(Input(2,1)==1)//传感器读取状态 { LedIn(1,1); LedIn(2,1); LedIn(3,1); LedIn(4,1);//板载led灯 if(Input(1,1)==1) {if (Input(3,1)==1) } else if(Input(1,1)==0) {if (Input(3,1)==1) {Servo(1,110); } else if(Input(3,1)==0) { } Servo(1,110); Servo(2,89); DelayNS(500); Servo(2,70); DelayNS(500);
} } {Servo(1,90); } else if(Input(3,1)==0) { } Servo(1,70); Servo(2,110); DelayNS(500); Servo(2,70); DelayNS(500);
程序流程图说明:
六、实验过程中遇到的相关问题,解决的办法。
在第二阶段中遇到的主要是程序问题,c语言程序编好之后一直有错误,矫正不过来。请同学帮忙,后来请吴老师帮忙纠正了一下,才发现是程序中if语句大
括号出了问题。
在第三阶段中遇到的主要是后轮与轴的结构固定,花了半个多小时,都没有进展,经过老师的讲解之后,我们小组又查看相关资料,最后成功解决。
第四阶段让老师评价的时候,机器车没走多长时间,就不走了。怕烧掉CPU,吴老师说拆了,我们小组分析有可能是用一个电机驱动导致的,只要改变驱动方式(增加驱动电机)就可以了。
七、机器人创新设计实验总结。
第一次看到机器人是在春节联欢晚会上,哈尔滨工业大学大学生用自己制造的机器人跳了一个舞蹈。感慨爆炸的时代来临,同时对机器人充满一种神秘感,一种不敢超越,更不敢接近的感觉,那是高科技,不是一般人可以做出来的。那是属于时代的天才的专属品,不是资质庸庸的人所能触摸的。机器人创新实验从机器人的机器结构、控制方式、控制接线方法、程序,以及整个设计的成品的动作检验多个方面让我了解了机器人,而且通过自己亲自做实验,做机器人,没有经过老师太多的帮助,做成功了,不免有很大的感慨。其中主要是对机械机构和程序之间的关系这部分,要实现规划的动作,在这个机器人创新设计实验整个过程中,三个人一个小组,分工明确是我们小组的特色,这也是我们能顺利完成实验的一个很重要的原因。当然也少不了各个组员的团结和各自的掌握的知识和特长。说实话,此次实验对我最大的影响就是对传感器和编程的认识、以及对我内心产生的震动。所以,我做总结如下:
1.实验组团是第一
2.实验过程要耐心
3.实验困难,多请教
4.实验问题,要思考
最后又一句话作为总结的结束“迎刃而上,方能获得实验的真谛”