
平面机构运动方案设计与拼装
姓名:
班级:
学号:
2015.12.5
一、实验目的
1、加深学生对机构组成原理的认识,进一步理解平面机构的组成及运动特性。
2、通过平面机构拼装,训练学生的实践动手能力,了解机构在实际安装中可能出现的运动干涉现象及解决的办法。
3、通过运动方案的设计,培养学生的创新意识和综合设计能力。
二、实验原理
机构具有确定运动的条件是其原动件数应等于其所具有的自由度数。如将机构的机架及与机架相连的原动件从机构中拆分开来,则其与构件构成的构件组必然是一个自由度为零的构件组。而这个自由度为零的构件组,有时还可以拆分成更简单的自由度为零的构件组,最后将不能再拆的自由度为零的构件组称为基本杆组,简称为杆组。
由杆组定义,组成平面机构的基本杆组应满足条件:
F=3n-2Pl-Ph=0
式中:n为杆组的构件数;Pl为杆组的低副数;Ph为杆组的高副数。
任何平面机构均可用领自由度的杆组依次连接到原动件和机架上的方法来组成,这是机构的组成原理,也是本实验的基本原理。
三、实验设备和工具
1、实验设备
该实验采用了CQJP—D机构运动方案创新设计实验台,包括机架及其零部件。试验台机架中有5根铅垂立柱,均可沿X方向移动。移动前应旋松上、下横梁上的立柱紧固螺钉,不能将螺钉拆下。移动时请用手轻轻推动,并尽可能使立柱移动过程中保持铅垂状态。立柱移动到预定位置后,用螺钉将上下两端锁紧。立柱上的滑块可在立柱上沿Y方向上移动。要移动立柱上的滑块,只需将滑块上的内六角平头紧定螺钉旋松即可。按上述方法移动立柱和滑块,即可在XY平面确定一个固定点,这样活动构件相对机架的连接位置就确定了。
2、工具:内六角扳手、活动扳手、钢板尺、自备三角板、圆规、纸和笔等文具 。
四、杆组拼装
设计的构件结构简图如下图所示
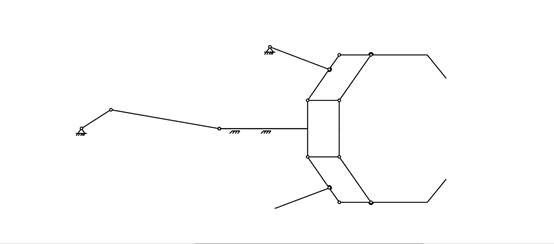
原理图为对称构件,因此可简化
自由度F=3×7-2×10=1。
按照简图所示进行拼接结果如下图所示

五、实验步骤
1)所有实验设备,各零、部件功用和安装、拆卸工具。
2)自拟平面机构运动方案,画出机构简图,形成拼接实验内容。所设计的机构应具有确定的运动。
3)根据拟定的机构运动学尺寸,利用机构运动方案创新设计实验台提供的零件按机构运动的传递顺序进行拼接。拼接时,首先要分清机构中各构件所占据的运动平面,其目的是避免各运动构件发生构件发生干涉。然后,以实验台机架铅垂面为拼接面的起始参考面,按预定拼接计划进行拼接。拼接中应注意各构件的运动平面是平行的,所拼接机构的外伸运动层面数越少,运动越稳定,为此,建议机构中各构件的运动层面以交错层的排列方式进行拼接。
为避免连杆之间运动平面相互紧贴而摩擦力过大或发生运动干涉,在装配时,应相应装入层面限位套。
4)机构拼装完成后,用手波动机构,检查机构运动是否正常。
5)机构运动正常后,连上电机。打开控制盒电源,拨动电机调速按钮,逐步增加电机转速,观察机构运动,并按比例绘制实际拼装的运动简图。
6)拆卸机构,将零件及工具放入工具箱,清理实验台。
六、注意事项
1、所有螺纹类零件只需轻轻用力带劲即可,不能过度用力,以免损坏零件。
2、机构拼接完成后,先用手动试验,确认正常后方可开电机。
3、试验结束后,各类零件应分门别类放回原处,拔掉电源插头。
七、实验总结
成员分工:
实验设计由马浩完成,实验的拼装由三人共同完成,实验报告由三人共同合作完成。
实验收获:通过本次试验不仅锻炼了我们的动手能力,还提高了我们的团队合作能力,整个团队的人共同努力去实现,并积极参与配合去完成这次实验。同时也感谢老师的指导。
第二篇:机械原理考研讲义二(平面机构的运动分析)
第三章 平面机构的运动分析
3.1本章知识点串讲
本章的知识点有:
1.用速度瞬心法求机构的速度;
1)需要理解的概念主要有瞬心和三心定理。
瞬心指的是两构件上瞬时等速重合点。
三心定理是说:三个彼此作平面相对运动的构件3个瞬心必位于同一直线上。
瞬心数目的计算公式为K=N(N-1)/2。
2)机构中速度瞬心位置的确定
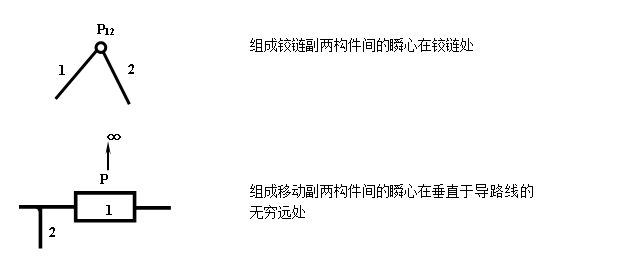
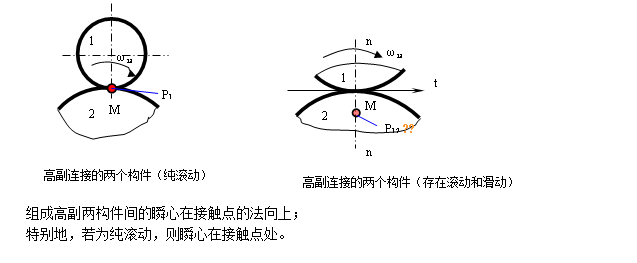
直观法——通过运动副直接连接的两个构件
组成铰链副两构件间的瞬心在铰链处
2.用解析法建立机构的位置,速度及加速度方程式。
3.2本章重难点总结
3.2.1重难点知识点总结
本章的难点是分析两构件重合点之间的加速度关系。
3.2.2本章重难点例题讲解
【例题1】求四杆机构的瞬心个数。
解析:这道题很简单,直接用相应的公式计算就可以。
瞬心数 N = 4(4-1)/2 = 6。
【例题2】求图中机构所有的速度瞬心
解析:运用三心定律。
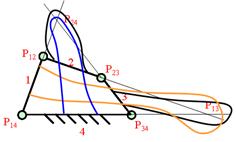
【例题3】在图所示的机构中,已知原动件1以匀角速度ω1沿逆时针方向转动,试确定:(1)机构的全部瞬心;(2)构件3的速度V3(写出表达式)。

解析:综合运用三心定律和瞬心的特点来求解。
(1)求出瞬心数
N=K(K-1)/2=6
瞬心如图所示
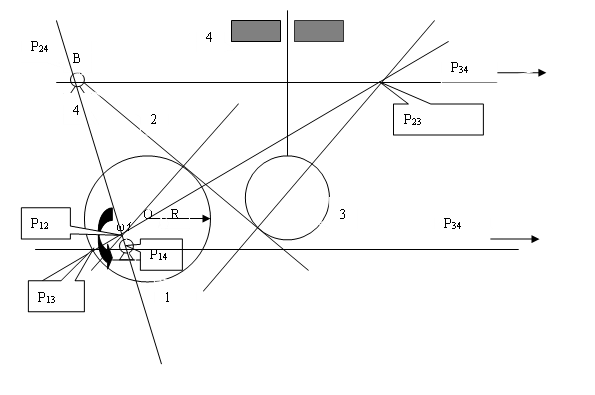
(2)V3=VP13=P14P13*ω1
方向向下。
【例题4】各构件尺寸、机构位置、构件1的角速度ω1均已知,求连杆上点K的速度vk及构件3的角速度ω3。

解析:综合运用三心定律和瞬心的特点来求解。
VP13 = P13P14×μl×ω1= P13P34×μl×ω3
所以有:ω 1 /ω3 = P13P34 / P13P14
同理可得ω 1 /ω2= P12P24/ P12P14
VK=KP24×μ1×ω2= KP24×μ1×ω1×P12P14/ P12P24
3.3本章典型题库
3.3.1作业
1.解释下瞬心的定义。
2.简述一下三心定理。
3.3.2作业答案
1.瞬心可定义为两构件上瞬时等速重合点。
2.3个彼此互作平面相对运动的构件的3个瞬心必位于同一直线上。