自动控制理论实验报告(三)
——二阶开环及闭环系统的频率特性曲线
班级:
姓名:
学号:
一、实验目的
1.了解和掌握Ⅰ型二阶闭环系统中的对数幅频特性 和相频特性
和相频特性 ,实频特性Re(ω)和虚频特性Im(ω)的计算。
,实频特性Re(ω)和虚频特性Im(ω)的计算。
2.了解和掌握欠阻尼Ⅰ型二阶闭环系统中的自然频率ωn、阻尼比ξ对谐振频率ωr和谐振峰值L(ωr)的影响及ωr和L(ωr) 的计算。
3.了解阻尼比 对开环参数幅值穿越频率ωc和相位裕度
对开环参数幅值穿越频率ωc和相位裕度 的影响及幅值穿越频率ωc和相位裕度的计算。
的影响及幅值穿越频率ωc和相位裕度的计算。
4.了解和掌握Ⅰ型二阶闭环系统对数幅频曲线、相频曲线和幅相曲线的构造及绘制方法。
二、实验原理及说明
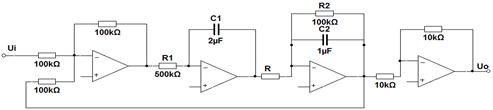
被测系统的结构图如图:
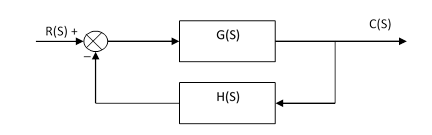
图中被测系统的闭环传递函数
 (S)=
(S)= =
=
以角频率ω为参数的闭环系统对数幅频特性和相频特性为
L(ω)=20lg|(jω)| (ω)= ∠(jω)
本实验以二阶闭环系统模拟电路为例,令积分时间常数为Ti,惯性时间常数为T,开环增益为K,可得:
自然频率: 阻尼比:
阻尼比:
谐振频率: 谐振峰值:
谐振峰值:
频率特性测试电路如图,其中惯性环节的R用可变电阻取代。

 其中输入“数/模转换OUT”,输出“数/模转换IN”。
其中输入“数/模转换OUT”,输出“数/模转换IN”。
计算欠阻尼二阶闭环系统中的幅值穿越频率ωc、相位裕度γ:
幅值穿越频率: 
相位裕度: 
γ值越小,Mp%越大,振荡越厉害;γ值越大,Mp%小,调节时间ts越长,因此为使二阶闭环系统不致于振荡太厉害及调节时间太长,一般希望:
30°≤γ≤70°
本实验以二阶闭环系统频率特性曲线为例,得:ωc =14.186 γ=34.93°
二阶闭环系统模拟电路的各环节参数:积分环节的积分时间常数Ti=R1C1=1s,惯性环节的惯性时间常数 T=R3C2=0.1s,开环增益K=R3/R。设开环增益K=25(R=4K),得ωn = 15.81rad/s, ξ= 0.316,谐振频率ωr = 14.14rad/s,谐振峰值: dB。
dB。
注1:根据本实验机的现况,要求构成被测二阶闭环系统的阻尼比ξ必须满足 ,否则模/数转换器将产生削顶。
,否则模/数转换器将产生削顶。
注2:实验机在测试频率特性时,实验开始后,实验机将按序自动产生0.5Hz~16Hz等多种频率信号,当被测系统的输出 时将停止测试。
时将停止测试。
三、实验内容与步骤
1.被测系统模拟电路图的构成如图所示,观测二阶闭环系统的频率特性曲线,测试其谐振频率 r、谐振峰值L(ωr)。
r、谐振峰值L(ωr)。
2.改变被测系统的各项电路参数,画出其系统模拟电路图及闭环频率特性曲线,并计算和测量系统的谐振频率ωr及谐振峰值L(ωr)。
3.实验步骤如下:
①将数/模转换的输出作为被测系统的输入。
②按照模拟电路图连接电路。
③运行、观察、记录。
运行相关的实验程序,选择“线性系统频域分析”→“闭环控制系统的频率特性曲线”→“启动实验项目”命令,弹出实验界面后,就会弹出“频率特性扫描点设置”表,选择角频率值,分辨率为0.1rad/s,单击“确认”按钮后将弹出“频率特性曲线”实验界面,单击“开始”按钮,即可。
测试结束后,观察伯德图和乃奎斯特图。
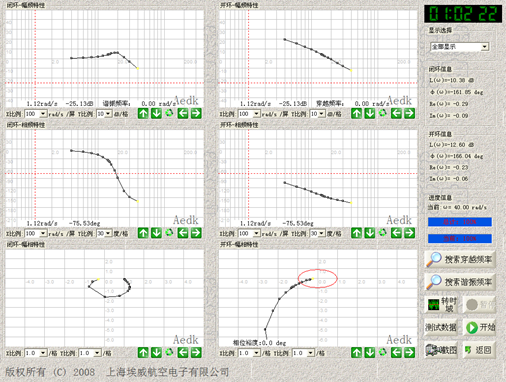
谐振频率r和谐振峰值L(ωr)的测试如下:
在闭环对数幅频曲线中,移动鼠标到曲线峰值处读出=14rad/s,L=5.2dB
在闭环对数幅频曲线中,移动L标尺线和标尺线到曲线峰值出,从曲线图左下角读出和L(),并可从闭环对数相频曲线中,移动 标尺到标尺线与曲线相交处,读出角频率。
标尺到标尺线与曲线相交处,读出角频率。
打开测试数据表(在界面上单击“测试数据”)分析,估出谐振频率r的值,在闭环对数幅频曲线中,在谐振频率r估计值处双击,该点测试完后,在特性曲线上将出现黄色的点,同时在界面右侧显示该系统用户点取的角频率点的、L、、Im、Re,实验结果与计算值对比。
在特性曲线中增添新角频率点(双击曲线上的点即可),改点测试完后,在特性曲线上将出现黄色的点,同时在界面右侧显示该系统用户点取的角频率点的、L、、Im、Re,如果增添的角频率点足够多,则特性曲线将成为近似光滑的曲线。
四、测试结果
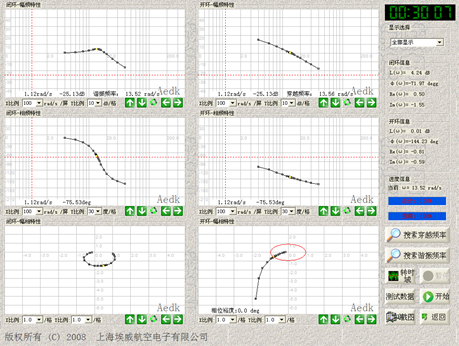
(1)开环增益K=25,惯性常数T=0.1,积分常数Ti=1时的波形如下:
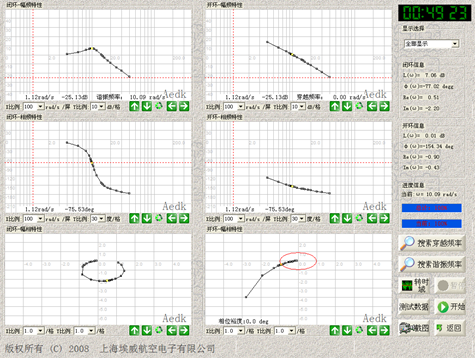
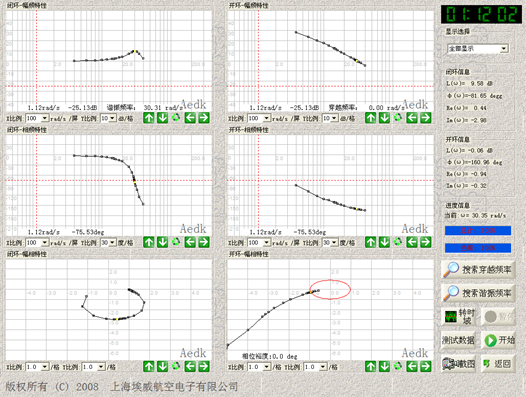
(2)开环增益K=25,惯性常数T=0.2,积分常数Ti=1时的波形如下:
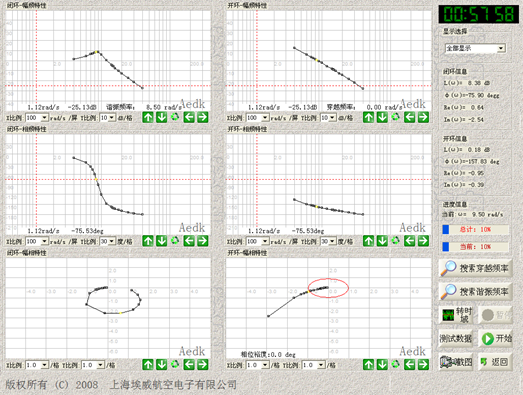
(3)开环增益K=25,惯性常数T=0.3,积分常数Ti=1时的波形如下:
(4)开环增益K=20,惯性常数T=0.1,积分常数Ti=0.5时的波形如下:
(5)开环增益K=25,惯性常数T=0.1,积分常数Ti=0.2时的波形如下:
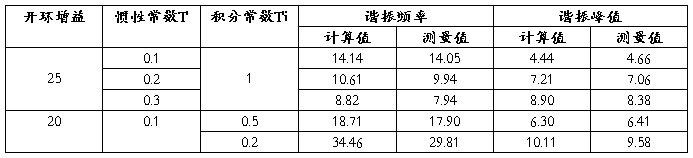
(6)按照下表改变实验被控系统,改变开环增益K、惯性时间常数T积分常数Ti,测量结果如下:
表3-7 不同参数系统的谐振频率和谐振峰值
五、思考题
1.说明在实际应用中,开环和闭环的不同特性。
开环系统制在一个控制系统中系统的输入信号不受输出信号影响的控制系统。也就是,不将控制的结果反馈回来影响当前控制的系统
闭环系统就比较复杂,输出量直接或间接地反馈到输入端,形成闭环参与控制的系统称为闭环控制系统。也叫反馈控制系统。
为了实现闭环控制,必须对输出量进行测量,并将测量的结果反馈到输入端与输入量进行相减得到偏差,再由偏差产生直接控制作用去消除偏差。整个系统形成一个闭环。
对于自动控制系统而言闭环系统,任何一个环节的输入都可以受到输出的反馈作用。控制装置的输入受到输出的反馈作用时,该系统就称为全闭环系统,或简称为闭环系统
2,仔细观察比对开环和闭环幅频特性,可以发现在低频段和高频段两条曲线逐渐趋向重合,请分析原因。
在低频和高频段,开环和闭环的幅频率特性逐渐趋向于相同的状态,所以两条曲线逐渐趋向重合,在中频段,闭环和开环的幅度受到频率的影响较大,两条曲线的差别较大。
第二篇:北京理工大学04年考研自动控制理论试题