

关于传感器在机器人玩具中的应用的调查报告
学 院: 机械工程学院
专 业: 机械制造及其自动化
班 级: 机制班
学 号: 080803110328
学生姓名:
指导教师: 冯治国老师
20##年 3 月 28 日
关于传感器在机器人玩具中的应用的调查报告
信息技术的三大支柱是测控技术、通信技术和计算机技术,而传感器技术是测控技术的基础。传感器处于自动检测与控制系统之首,是感知、获取与检测信息的窗口。科学研究和生产过程需要获取的信息,都要首先通过传感器转换成电信号或光信号等容易传输和处理的信号。科学技术越发达,自动化程度越高,对传感器的依赖就越大。“没有传感器技术就没有现代科学技术”的观点已为世界公认。
随着电子技术的发展,机器人智能玩具越来越常见,传感器的作用就是根据规定的被测量的大小,定量提供有用的电输出信号的部件,亦即传感器把光、电、温度、压力及气体等的物理化学量转换成信号的变换器。传感器作为机器人智能玩具的关键部件,它直接影响机器人智能玩具的技术性能的发挥。
一、磁阻传感器在机器人玩具中的应用
1、应用背景
一个机器人玩具的控制系统设计,主芯片采用的是以摩特罗拉公司的MC86EZ328芯片,只完成与通信、运算等有关的主要操作,在没有操作时,由运行于其上的操作系统uClinux来维护。对于所有与EZ328的核心运算、控制、通信、操作无关的外围设备的维护和控制都通过一块AT89C52来完成,它与EZ328的底层通信协议为同步串口协议(SPI),在AT89C52中由软件来实现。C52包含的部件主要是A/D转换器,键盘接口,电机驱动模块。
2、传感器应用状况
机器人玩具控制系统的设计中对方向的控制尤其重要,直接体现了机器人玩具的控制精度和整体效果。在本文中要解决的问题就是控制好机器人的运动方向和球门之间的夹角,让其能够在运行中实时地自我调整,准确地把球送入球门。
3、磁阻传感器原理
HMC的输出电压为磁场强度为0时传感器的输出。所以当U0为0时, Uout正比于磁场强度B。如图4,假设机器人处于水平面上,X为机器人行进方向,Y为水平面上垂直X的方向向右(即X顺时针转90),地里北极方向和地磁北极方向如图所示。H为地磁场,Hx、Hy分别是H在X、Y方向的水平分量, β为机器人行进方向和地磁北极方向的夹角, γ为地磁北极和地理北极方向的夹角,K就是机器人行进方向与地理北极方向之间的夹角,也就是我们最终要求的角度。(此处的β、γ、 K都是由前者出发顺时针到达后者的角度)由图可明显看出,K= β-γ。而在地球上不同方位的γ可查表得出,所以关键就是求得 。由磁阻传感器可以得出Hx、Hy,(此处忽略了机器人在Z轴方向的倾斜,所以二器就够用了)。
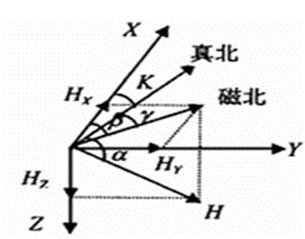
图4
4、测量电路
从HMC1022输出的电压信号非常微弱,测试是0到3mv(具体每个芯片的输出不是完全一致),需要经过放大器的放大,放大器选用的是AN622,放大倍数选定为600倍,这种放大器可以加上一个2.5v的偏置电压,所以输出到A/D的电压为2.5v+(0~3mv)*600,两路采集到的电压信号经过放大后连接到ADC0832。ADC0832是个两通道8位精度的逐次逼近式模数转换芯片,通过一个串行的I/O口DI输入一个MUX ADDRESS序列,来配置A/D成差分方式并选择哪一路通道的信号。2051通过一路I/O来串行读入转换后的数值。
用max662a作为RST/SET部分的恒压源,电路的工作原理及流程如下:
1. 由2051的14端(P1.7)输出高电平,SR电路set功能选通
2. 通过2051 P1各相应端子控制ADC0832,完成一次A/D转换,记下此次读入的电压值Vset 。
3. 2051的P1.7输出低电平,SR电路reset功能选通
4. 通过2051 P1各相应端子控制AD0832,完成一次A/D转换,记下此次读入的电压值Vrst
5. 求出1022的输出偏置电压V0=(Vset+Vrst)/2。
6. 通过2051控制AD0832完成A/D转换,将每一次读入的值Vrst减去V0就得到计算需要用的电压Vread=Vrst-V0;(包括两个轴方向的电压Vready、Vreadx)
7. 求得
8. K=β-γ, goto 6
经过2051处理后得出的数值,在时钟的配合下用一个I/O口模拟PWM输出,传给C52单片机。
5、传感器检测信息与控制系统相互关联
机器人玩具的方向控制的核心部件就是HMC1022两维磁阻微电路芯片,它的机构是四臂的惠斯通电桥,将磁场转化为差动输出的电压,可以检测低至85微高斯的磁场信号,这种低成本的传感器相比传统型号的同类产品具有更小的体积和更低的功耗。供电电源为3V-10V直流电压。本设计中采用的HMC0122采用的是16脚SOIC封装,集成了两路的惠斯通电桥,测出平面的X轴和Y轴的磁场信号,这样就可以获得水平面上方向的完整信号。
比较特殊的是Honeywell公司的这种磁阻传感器带有一个获得专利的置位/复位电路。
图2和图3分别是HMC1022内部电桥和置位/复位电路电路设计。
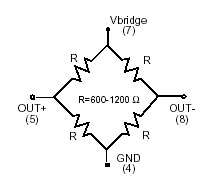
图2
图3
二、位差超声波传感器在智能玩具机器人中的应用
1、应用背景
目前国内生产的电子玩具技术含量较低,由于不具备智能化,利润空间小,受欢迎程度低。近年来,伴随计算机技术的高速发展,智能控制器的发展迅速,一些典型的智能玩具如轮式移动机器人在部分院校教学中得到推广,因为智能玩具机器人是一个典型的机电一体化系统,它融合制造技术、机械、电子、传感器、计算机和人工智能等众多先进技术,是进行工程训练、教学实验和研究的理想平台,在电子学教学领域中有着诸多的研究价值。
传感器是智能机器人获取外界数据的"感知系统",离开智能传感器的机器人大多是些功能单一,不具备思维能力,有些甚至是底盘基座固定式的,使得这些机器人只能固定在某一位置按照事先设定动作进行机械式的重复操作,其应用范围仅限于工业生产中的重复性工作,不便于普及和推广,可见基于传感器的智能控制器在实现玩具机器人的智能化的作用中不可或缺,笔者介绍了一种基于超声波原理的位差超声波传感器在智能玩具教育机器人中的应用,通过较为具体的设计过程介绍了智能玩具机器人距离测试系统的软硬件设计方法,并对位差超声波传感器的性能指标和一些关键技术作较深入地探讨,提出了一些编程控制技巧及算法。
2、传感器应用状况
超声波传感器在非接触性测量方面的应用非常广泛,可用于检测液体水位(特别是具有腐蚀性的液体,如硫酸、硝酸液体),汽车倒车防撞系统,金属(或非金属)探伤,机器人感知系统设计等,利用位差超声波传感器与51单片机构成智能玩具机器人的"距离感知系统",具有电路接口简单,成本低廉,稳定性好等特点,但其测量精度受到位差超声波传感器的最大测量距离以及与被测物体反射角等的限制。
3、差动式电容载荷传感器结构及工作原理
采用"MCU+传感器+显示设备+执行机构"的总体设计方案,要求MCU对非接触式传感器获取的外部距离信息进行计算转换,将得出的智能玩具机器人与前方障碍物的距离值送到显示设备显示,并根据程序设定的距离阈值控制智能玩具机器人实现自动导航功能,系统整体框图如图1所示。
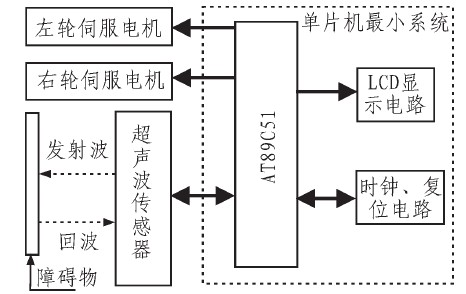
图1 系统硬件框图
其中系统MCU采用目前性价比较高的AT89C51单片机,利用"位差超声波传感器"作为距离传感器,以非接触的形式测量前方物体的距离;显示设备采用LCD1602液晶显示模块;执行机构采用PARALLAX公司生产的连续旋转伺服电机,其优点是编程控制方便且不需额外增加驱动电路,图1中超声波传感器测距的工作原理如图2所示。
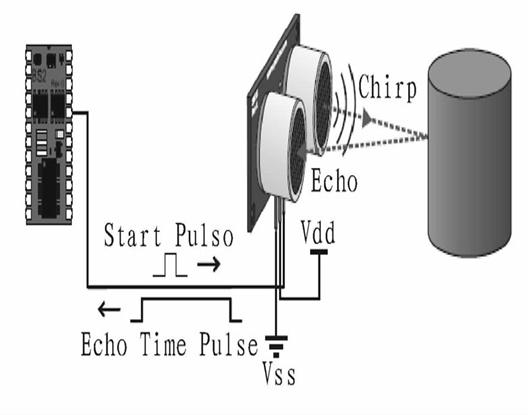
图2 超声波传感器测距的工作原理
4、测量电路
超声波传感器与单片机系统进行接口构成距离检测的硬件系统,在系统软件的控制下,单片机向位差超声波传感器发送的一个触发脉冲,位差超声波传感器被此脉冲触发后会产生一道短40 kHz的脉冲电信号,此40 kHz的脉冲电信号通过激励换能器处理以后,将转换成机械振动的能量,其振动频率约在20 kHz以上,由此形成了超声波,该信号经锥形"辐射口"处将超声波信号在空气中以每秒约1 130英尺的速度向外发射出去。当发射出去的超声波信号遇到障碍物以后,立即被反射回来。接收器接收到反射回来的超声波信号后,通过其内部转换,将超声波变成微弱的电振荡,并将信号进行放大,就可得到所需的脉冲信号,此脉冲信号再返回给单片机,表示回波被探测,这个脉冲宽度就是对应于爆裂回声返回到传感器所需时间,其时序如图3所示。
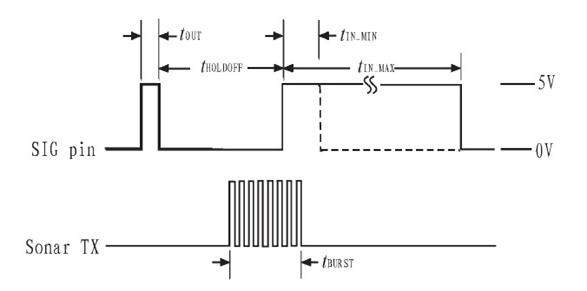
图3 位差超声波传感器工作时序图
5、传感器检测信息与控制系统相互关联
测距子程序设计
根据位差超声波传感器的时序原理图,对C51单片机内部定时/计数器编程,实现对前方物体距离的测量并将测量结果在LCD模块上显示。测距子程序的基本设计算法,用流程图表示如图4所示。

图4 测距子程序流程图
程序设计思路主要分为2步:
1)根据位差超声波传感器的控制时序图(图3),启动位差超声波距离传感器,即通过单片机编程,给超声波传感器的信号引脚提供一个持续时间为5μs的高电平,然后拉低信号引脚750μs,这样位差超声波传感器就被启动,发出超声爆裂,与此同时,启动单片机的定时器开始计数,当超声波遇到物体时会立即反射回来,位差超声波传感器的接收器接到回波时,会自动拉低其信号引脚的电平,单片机查询到此引脚的电平下降沿到来时停止定时器计数,此时定时器计数值就间接反应了超声波从反射到返回所经历的时间。
2)读出定时器的计数值除以2,便得到超声波在遇到被测物体返回的时间,根据:距离=速度×时间,就可以计算出前方物体的距离,因超声波在常温下的空气介质中传播的速度大约为344 m/s,即29.034μs超声波能传播1 cm,具体编程时在程序中用语句x=count/29.034来计算距离值,获得被测距离值后,调用LCD显示函数将距离值在LCD模块上显示出来。
超声波导航程序设计
利用位差超声波距离传感器测得的"距离"信息,可以引导智能玩具机器人实现避障行走。当智能玩具机器人距离前面障碍物小于20 cm时,它会向左拐改变行进方向,避免与物体碰撞,下面简要分析以超声波导航程序的基本设计思路,程序设计算法用流程图表示如图5所示。
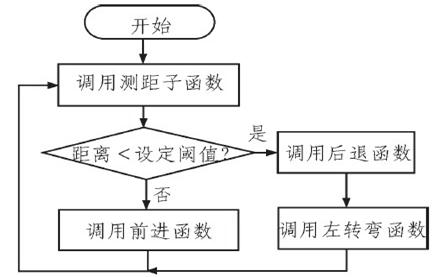
图5 超声波导航程序流程图
程序通过反复调用超声波测距子程序,获取智能玩具机器人前方被测物体的距离值;判断距离是否在设定阈值以内,若大于程序设定的距离阈值,调用函数Forward(),驱动智能玩具机器人前进;若小于程序设定的距离阈值,调用Backward(),驱动智能玩具机器人后退一段距离;接着又调用Left_Turn(),驱动智能玩具机器人左拐后程序再返回重复以上过程。
三、机器人传感器的发展趋势
未来机器人传感器技术的研究,除不断改善传感器的精度、可靠性和降低成本等外,随着机器人转向微型化、智能化,以及应用领域从工业结构环境拓展至深海、空间和其他人类难以进入的非结构环境,使机器人传感器技术的研究与微电子机械系统、虚拟现实技术有更密切的联系。同时,对传感器的高速处理、多传感器融合和完善的静、动态标定测试技术也将会成为机器人传感器研究和发展的关键技术。
随着机器人技术的发展,适应未来机器人的感知系统及相关研究将成为主要研究方向,未来机器人传感器及相关研究包括多智能传感器技术、网络传感器技术、虚拟传感器技术和临场传感器技术。
可以说,机器人技术是人类20世纪最伟大的几种技术之一,而机器人传感器技术是其关键技术,机器人传感器的技术必将趋于完善。
第二篇:传感器在工业机器人中的应用
传感器在工业机器人中的应用
工业机器人的准确操作取决于对其自身状态、操作对象及作业环境的限确队识。这种准
确认识沟通过传感器的感觉功能实现。
机器人自身状态信息酌获取项过其内部信息传感25(位置、速度、加速度等)获取并为机 器人控制反馈信息。希迪电子操作刘象钟L部环境的队识通道外部传感器得到。
一、零位和极限位互的检测
答你的检测精度皇接影响—[业机器人的重复定位精度和轨迹精度,极限位置的检洲则起
保护机器人和安全动作曲作用。
工业机器人常川的位置传感器有接触式微动开关、精密电位计或非接触式光电外关、电讽
流传感器。通常在机器人的每个共计上各安装种接触式传感器或非接触式传感器及与其对
/匝的死挡块。在接近极限位置g1.传感器先产土限位停止信号,如果限位停止信号发出之后还
未停J:,则油死挡块强制停[L。肖无法确定机器人某关节的学位时.司“出位移传感器的输出信
号确定。利用微动开关、光电开关、电涡流等传感器确定零位的特点是零位的固定性。当传感器
位置调好后,此关哨的零位就确定丁,若要改变,则必须重新调整传感器的价黄。而用电位11或位移仕感器确定零位时.不需要至斯调理其位置.只要在LI宾机软件中修改车位参数他即可。
=、位移量的检测
位移传感器一股都安装在机器人各关节上,用于检测机器人各关节的位移量,提供机器人
的位置控制信息。选用时府考虑到女装传感器结构的*IJ行件以及传感器本身的精度、分辨率
及灵敏度等。机器人上常用的位移传感器打旋转变比2E、起动变压器、感应同步器、电位汁、光
栅、磁枷、光电编码器辞。
关啊型机器人大多采用光电编码器,Au采用光电增量码盘。经过处理后酌佰号是勺关节
转角角度成一定关系式的脉冲数.计算机在确定零位和正、负方向后.只要计脉冲数就可以得
到关节转角酌角位移值。如果将七安装在关节的木端转驯L:川lJ可以形成该关节的闭环控制。
理论—懒可以获得较高的控制精度。但这样对传感甜的分辨率要求高。
在机器人中使用速度传感器是为实现机器人番关节的速度闭环控制。在用应流、交流伺 服电动机作为工业机器人驱动元件时.钽电容一般采用测速发电机作为速度酌检测器。它勺电动机
同轴,电动机转速不同时,输出的电压位也不问、将其电压侦输入到速度控训罚环反馈回路中,
以提高机器人的动态性能。
加直度传感器被用于机器人中关节的加速度控制。钉时为了抑制振动而在关节上进行检
测,将测到的振动频率、幅值和相位输入计算机。然后在控制环节中叠An一个勺此频率相向、
幅值相等而相位相反的控制信号用于抑制振动。
四、外部信息传感器在电弧焊机器人中的应用
闭门—2为其应用之一。在垂直于坡u楷面的上方安装一窄缝光发射器.在抖L方用视
觉传感器摄取坡u的v字形图像,该v字形图像的下地就是坡口的对接部位,求出其位置就

心控制机器人焊枪沿着被u对接部位移动.进行焊接。这种方‘法最重要的两点是:需要不易被
油污、可靠什好的视觉作感器和正确、快速地得到洲东噪卢的图像,图几 3(a)是用32×32 点状图像视觉传感器得到的原阉像,

Atmel团(b)为二位化处邵后的图像,图(c)为用特殊处理凹路处
理后的图像。图15—4/J采用倔件接近觉传感器跟踪坝口槽的方法。齐坡口槽r—方用4个接近
觉传感器获取坡口槽位置信息.通过计算机处邵后实时护制机器人焊枪跟踪坡口槽进行焊接。
触觉传感器无论装设在机器人本体(腕、了爪)或安装在机器人的操作台上,都必须通过 姬件和软件与机器人有效结合.钽电容形成协调的个系统。利用触觉传感器的例子最多的是通过
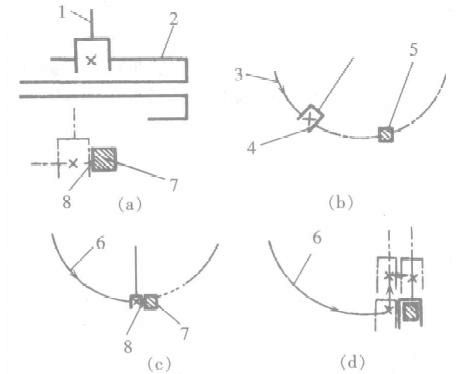
触觉确认对象物的伎量,从们修正于爪的位置,以便能准确地抓住对象物。图15—5(a)表示
操作器在义一范阁内进行搜索的‘种力法。操作器存横向用学位过向前进行搜索,搜索中,当
操作器的手爪同对象物接触时.触觉即打输出,同时停IL操作器的搜索。转移到抓取对象物的
控制,这种控制,‘面临控触觉严牛的输出。一凹后退、横移并转到抓取动作。图(d)即表示这
种情形,图(b)、(c)表示圆状搜索的情形。操作器抓取对象物时,重要的是于爪向对象物的价
置关系,如图15—6(a)所示,对象物向手爪的人侧接触时,应该进行于爪的修正动作。即当构
成触觉的各传感器的输出满足(J‘l U山)门(Rl UR6)=1时,向图(n)的筋头R1方向移动单伤
员,使之被校正到图(b)。宅手爪如图认—7所Mi抓取对象物nJ,应该校正于爪的姿势。在囚
(a) 场合,山M门豆m门瓦c门豆z。=1成方时.按照图(a)的箭头认入向校正姿
势.使刘象物和手

(b) 爪如图(N所不保持平行关系。出这种状态转到抓握动作.于爪就能淮确地抓仕刘
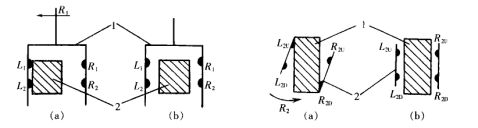
象物。

wxq$#