
机电一体化综合实训报告
2012/2013学年第一学期
班 级
姓 名
学 号
指导教师
20##年12月14日
荣成学院学院机电一体化综合实训任务书
摘要
“机电一体化综合实训”是机电专业的综合性实习训练,放在专业基础课程学完之后,集气压技术、液压技术、控制电机及电气控制技术、自动检测技术、PLC及其自动控制技术等为一体。在了解了机电系统的基本组成、基本功能、控制技术和控制方法等知识后,利用宇龙机电控制仿真软件完成典型机电一体化系统控制部分的设计和仿真实验。
本设计是完成运料小车电气控制系统的设计;完成运料小车的电气自动控制系统设计。其硬件部分共包括PLC控制、输入电路、控制电路等三个主要组成部分。设计的总体思路是准确安全的对运料小车进行控制,实现电气自动化。
关键词 :控制系统;PLC控制;工作方式;运动过程
目录
荣成学院学院机电一体化综合实训任务书 I
摘要... II
序言... 1
第1章 绪论... 2
1.1 实训主要内容... 2
1.2 实训目的... 2
1.3 实训任务... 2
1.4 实训与其它实践性教学环节的关系 2
第2章 控制系统设计... 3
2.1 运料小车的控制要求... 3
2.2 运料小车的工作方式... 3
2.3 PLC选择... 3
2.4 控制系统构成图... 4
第3章 硬件设计... 5
3.1 运料小车运动过程... 5
3.2 I/O 接口的分配... 5
3.3 PLC的外部接线图... 6
3.4 系统接线图... 6
3.5 控制系统流程图... 7
3.6 系统梯形图... 7
第4章 程序调试及运动仿真... 10
4.1 程序调试... 10
4.2 实验结果分析... 10
参考文献... 11
致谢... 12
附录... 13
序言
现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。机电一体化就是以机械技术和电子技术为主题,多门技术学科相互渗透、相互结合的产物,是正在发展和逐渐完善的一门新兴的边缘学科,它包括了微电子技术、计算机技术、信息技术与机械技术等多学科技术。机电一体化使机械工业的技术结构、产品结构、功能与构成、生产方式及管理体系发生了巨大变化,使工业生产由“机械电气化”迈入了以“机电一体化”为特征的发展阶段。
“机电一体化综合实训”是机电专业的综合性实习训练,放在专业基础课程学完之后,集气压技术、液压技术、控制电机及电气控制技术、自动检测技术、PLC及其自动控制技术等为一体。在了解了机电系统的基本组成、基本功能、控制技术和控制方法等相关知识后,以宇龙机电控制仿真软件为平台,完成典型机电一体化系统控制部分的设计和仿真实验。
第1章 绪论
1.1 实训主要内容
运料小车电气控制系统搭建及PLC应用训练;
设计PLC程序机电系统的过程控制;
在仿真平台上运行程序并进行仿真实验;
完成设计并撰写不少于4000字的实训总结报告;
修改完善实训总结报告,准备答辩。
1.2 实训目的
目的:机电一体化综合训练是一个阶段性的综合训练环节,大学三年级上学期开设。通过综合训练,首先让学生了解一般机电控制系统的组成和控制方法,建立机电一体化系统控制的概念;其次通过学生综合运用所学机电专业相关理论知识,根据机电一体化系统上的机械结构及控制部分的工作原理,自己动手设计各个机械部件的动作控制流程,最后在典型机电一体化系统仿真试验台上进行仿真实验,锻炼学生的理论联系实际能力及综合应用知识的能力。
1.3 实训任务
任务:包括机电一体化系统电气控制系统搭建及PLC应用训练、设计PLC程序机电系统的过程控制、在仿真试验台上运行程序并进行仿真实验。
任务分配:xxx 控制系统设计 程序的编制及调试
xxx 外部接线及PLC的接线 程序的调试
xxx 运料小车运动控制的调试
xxx 控制流程图的编写 I/0地址的分配
xxx PLC的选择
xxx 编写实训报告
1.4 实训与其它实践性教学环节的关系
通过机电一体化综合实训的环节,让我们对液压技术、控制电机及电气控制技术、自动检测技术、PLC及其自动控制技术等理论专业知识有了更加深刻的认识,同时也提高了对机电一体化控制系统产品设计流程的意识。
第2章 控制系统设计
2.1 运料小车的控制要求
如图2-1 运料小车的机械结构图所示,运料小车从原点出发,当碰到行程开关SQ2小车停,甲装料斗开始装料;5秒后甲装料斗关闭,小车继续前进,碰到行程开关SQ3小车停,乙装料斗开始装料;3秒后乙装料斗关闭,同时小车启动后退,当碰到行程开关SQ1后小车停,同时小车开始卸料,5秒后卸料结束,小车完成一个工作循环。可以启动、可以循环、可以停止。
图2-1 运料小车机械结构
2.2 运料小车的工作方式
工作方式由用户设定:
(1)、小车连续循环与单次循环可通过SA1进行选择,当SA1为“1”时小车连续循环,当SA1为“0”时小车单次循环;
(2)小车连续循环,按停止按钮SB2小车完成当前循环后才能停止;当再按启动按钮SB1小车重新运行。
2.3 PLC选择
可编程控制器(简称PLC):是一种数字运算操作的电子系统,专为在工业环境应用而设计的。它采用一类可编程的存储器,用于其内部存储程序,执行逻辑运算,顺序控制,定时,计数与算术操作等面向用户的指令,并通过数字或模拟式输入/输出控制各种类型的机械或生产过程。
可编程序控制器实施控制,其实质就是按一定算法进行输入输出变换,并将这个变换与以物理实现。输入输出变换、物理实现可以说是PLC实施控制的两个基本点,同时物理实现也是PLC与普通微机相区别之处,其需要考虑实际控制的需要,应能排除干扰信号适应于工业现场,输出应放大到工业控制的水平,能为实际控制系统方便使用,所以PLC采用了典型的计算机结构,主要是由微处理器(CPU)、存储器(RAM/ROM)、输入输出接口(I/O)电路、通信接口及电源组成。PLC的基本结构如下图2-2所示:

图2-2 PLC基本结构
S7-200系列PLC输入输出特性

考虑经济性时,应同时考虑应用的可扩展性、可操作性、投入产出比等因素,进行比较和兼顾,最终选出较满意的产品。输入输出点数对价格有直接影响。每增加一块输入输出卡件就需增加一定的费用。当点数增加到某一数值后,相应的存储器容量、机架、母板等也要相应增加,估因此,点数的增加对CPU选用、存储器容量、控制功能范围等选择都有影响,在算和选用时应充分考虑,使整个控制系统有较合理的性能价格比。
本设计选取CPU22,它有8输入/6输出,I/O共计4点。和CPU221相比,存储容量扩大一倍,并且有2个扩展模块,有内置时钟,有更强的模拟量和高速计数以及处理能力,是应用最多的S7-200产品之一。
2.4 控制系统构成图

第3章 硬件设计
3.1 运料小车运动过程
运料小车的动作分解如图3-1所示,从原点出发,前进,遇到SQ2停,甲装料,5秒后甲停、小车启动前进,遇到SQ3停,乙装料,3秒后乙停,小车后退,遇到SQ1停,开始卸料5秒,一个工作循环结束。
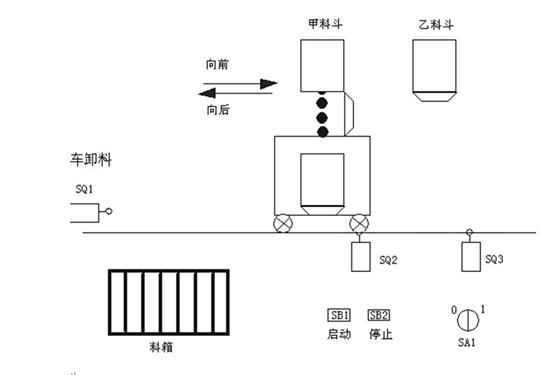
图3-1 运料小车运动示意图
3.2 I/O 接口的分配
从控制方式选择上需要1个普通按钮和1个自锁按钮,分别完成启动 I0.0和停止I0.4。限位开关有3个,SQ1限位开关I0.1、SQ2限位开关I0.2、SQ3限位开关I0.3、工作方式选择开关I0.5,共六个输入信号。
输出信号有前进驱动Q0.1、甲装料斗驱动Q0.2、乙装料斗驱动Q0.3、后退驱动Q0.4、卸料驱动Q0.5,五个输出点 。如表一、表二
表一

表二

3.3 PLC的外部接线图
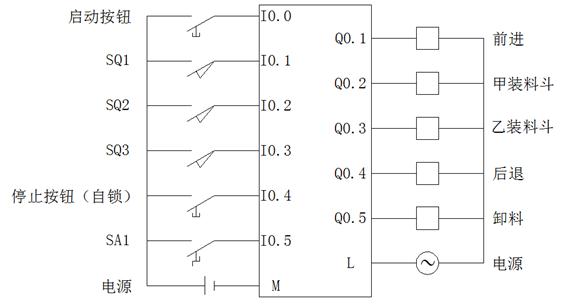
图3-2 PLC外部接线图
3.4 系统接线图
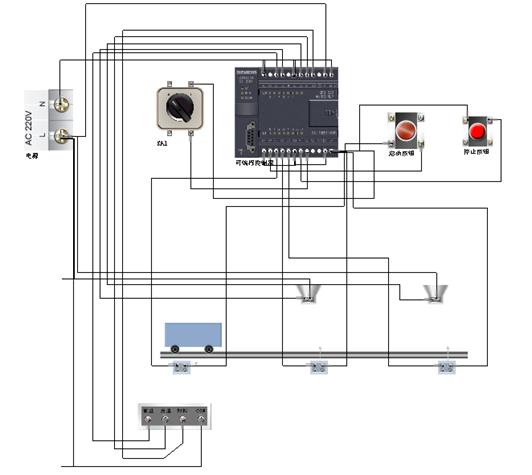
图3-3 系统接线图
3.5 控制系统流程图
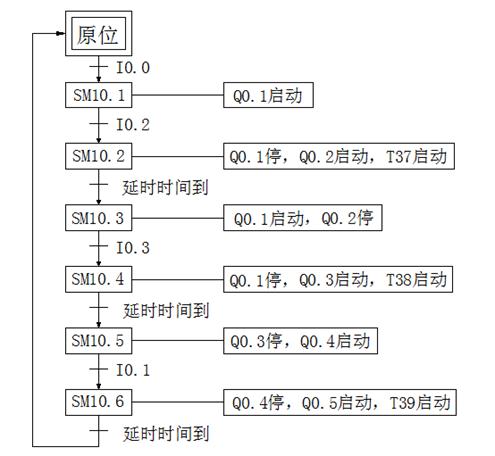
图3-5 控制流程图
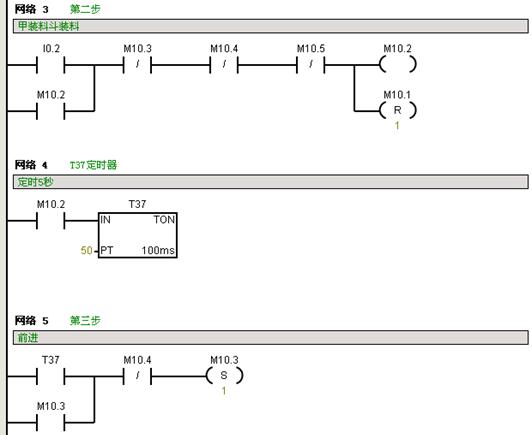
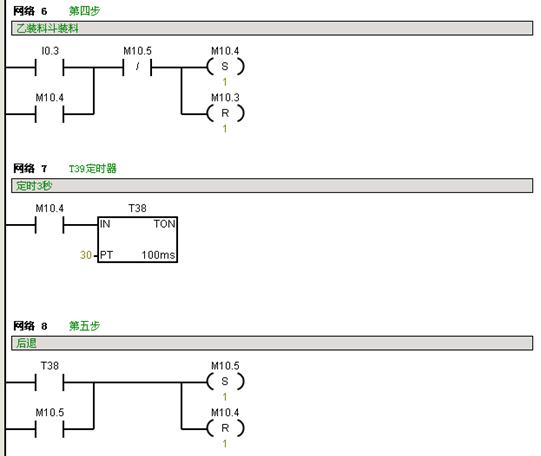
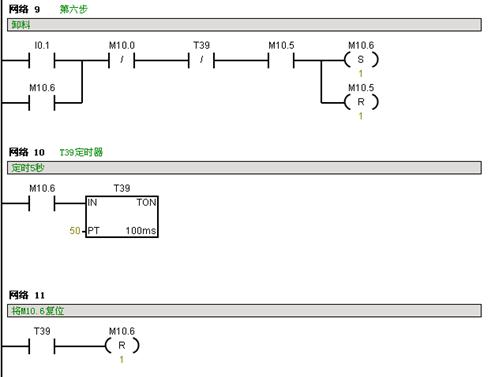
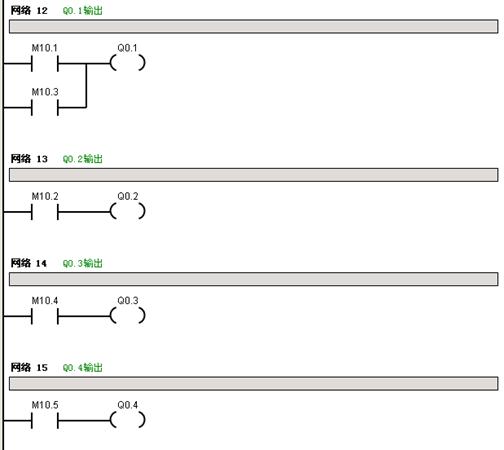
3.6 系统梯形图


第4章 程序调试及运动仿真
4.1 程序调试
1) 按照表一、表二、图3-2、图3-3所示将PLC的I/O端与对应的外部接线图连接硬件电路,检查无误后给实验装置上电。
2) 打开SIEMENS S7-200PLC编程软件,键入所编程序。经编译检查无误后,把编写好的程序下载到西门子S7-200的PLC中进行调试。
3)程序调试:将SA1转到1位置,按动启动按钮SB1,小车按照前进→停车→甲装料→前进→停车→乙装料→后退→停车→卸料→前进…的连续循环模式持续运行,当按动停止按钮SB2后,无论小车在什么位置,小车都会完成本次循环后停在原点位置。
4)仿真分析:连接接线图,三个限位开关要接常开还是常闭需要经过分析和不断的调试分析。
4.2 实验结果分析
以上程序经模拟调试和现场运行均达到了理想的效果,运料小车能够安全、稳定的按照工艺要求运行,实现了运料小车的自动化控制要求。
参考文献
[1].章文浩.可编程控制器原理及实验.第一版.国防工业出版社.2003.7.11页-12页
[2].何焕山.电气自动化.湖南医科大学学报(自然科学版)2009.(11)
[3].鱼雷声.电气控制与PLC应用.北京:机械工业出版社,2003
[4].章文浩.可编程控制器原理及实验.北京:国防工业出版社,2003
[5].黄云龙.可编程控制器教程. 北京:机械工业出版社,2003
[6].戴一平.可编程控制器技术及应用.北京:机械工业出版社,2004
[7].孙柏林.装配制造[M].河北龙山发电公司.2009.(11)
[8].王兆义.小型可编程控制器使用技术.北京:机械工业出版社,2001.1
[8].吴丽.电气控制与PLC实用教程.郑州:黄河水利出版社,2005.2
[9].郭宗仁.可编程控制器及其通信网络技术.北京:机械工业出版社,1999
[10].王也仿.可编程控制器应用技术.北京:机械工业出版社,2001
[11].周恩涛.可编程控制器原理及其在液压系统中的应用.北京:机械工业出版社,2003
致谢
两周的机电一体化综合实训已经结束,虽然困难重重,还好有老师的及时指导和同学的大力支持,使得过程轻松多了。
通过这次机电实训使我们收获颇多,让我们更加深刻了解机与电的结合,把我们日常所学的知识应用于这次实训中 ,更加拉近了理论和实际的距离,这次是很好的复习以前所学知识的机会,这次让我感受最深的能够把PLC真正的应用于工程实际中,更加了解PLC的强大功能及它带给我们的便利。让我更加熟知PLC程序的编制、调试、应用。
在这次实训之后我更加了解我们所学专业,深知我们还有许多不足的地方需要改进和进步,以后会更加努力学习专业知识 ,增强专业技能能力
课程设计是一次综合性能力的考验,除了良好的专业知识,还要有灵活的应灵能力,每当组内同学懈怠时,我虽然也有过放弃的念头,但还是不得不不充当协调和鼓励的角色,经过多次的沟通和讨论,终于在忙碌的几天完成了最终方案,走出了第一步。
最后,真诚的感谢老师的多次指导和建议,感谢组内同学不辞辛苦的合作帮助,才使得这次机电一体化综合实训得以顺利完成。
附录
运料小车运行过程录像视频:
运料小车运动过程仿真.exe