“S形轨迹无碳小车的结构设计
摘要:针对第四届全国大学生工程训练综合能力竞赛题目,设计一辆通过重力驱动的纯机械结构的无碳小车,且小车具有周期性越障功能。通过所学知识,设计并制作该小车,参加比赛。设定不同的参数,借助工程软件MATLAB对小车的轨迹进行仿真计算。通过分析,设计出一辆满足比赛要求的小车。并且通过调试证明,小车能够稳定行驶,具有较高的可靠性。
关键词:无碳小车 越障 轨迹 仿真
0前言
本文针对第四届全国大学生工程训练综合能力竞赛关于“S”形轨迹的要求,设计并制作了一种将重力势能转换为动能,并且按照“S”形轨迹稳定前行的无碳小车。小车为三轮结构,前轮为方向轮;后面一轮为驱动轮,一轮为从动轮。小车具有可调节的转向控制机构,以适应700-1300mm间距的不同间距障碍物。
1小车结构设计
本文把小车的机构分为:原动机构、传动机构、转向机构、微调机构与车身。除了轴承、螺栓螺母等标准件可以直接选用外,小车的其余部件均使用LY102铝合金制作。本文的设计目的是使小车各部分的尺寸协调,满足强度要求、实现不同距离的越障功能。下面是各个机构的设计:
1.1原动机构设计
原动机构是利用重物下落时的重力势能转化为动能,从而驱动小车前进和转向的机构。重物是1kg的标准砝码,重物周围是三根均布的钢管,从而约束重物的自由度,使重物直线下降,减少了能量损失,保证了小车重心的稳定性。重物通过尼龙线绕在小车的绳轮上,在下降的过程中,带动绳轮的转动,实现了能量转换。在实际测试中,证明了该结构简单、能量转化率高、成本低等特点。
1.2传动机构设计
传动部分是原动机构和小车主动轮动力传递的枢纽,本文设计的小车的传动机构由后轮、一级齿轮、及其相关零件组成。由于小车具有转向的功能,为不干扰小车的转向,后轮采用差速连接。小车的右后轮为主动轮,左后轮为从动轮。主动轮与传动机构相连,驱使小车的运动,从轮轮用轴承空套在后轴上,跟随小车的运动。为了适应不同间距越障,同时增大小车行驶的距离,我们采用多组齿轮啮合的方式,将700-1300mm的间距大致分为三组:700~900mm,900~1100mm,1100~1300mm。分组后可根据不同障碍物间距,对应着不同组齿轮的啮合,从而调整越障的幅度。与单组齿轮传动相比,这种传动方法越过的障碍物更多,行走距离更远。下图是传动机构的齿轮分布图,通过移动后轮轴上的齿轮组,则可以切换不同组齿轮的啮合。
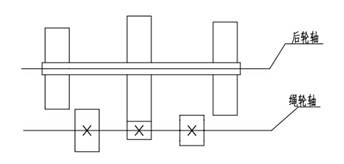
图3 传动齿轮分布示意图
根据本文设计,两后轮轮距为150mm,且后轮的直径为150mm,且保证小车最逼近障碍物时的安全距离,即最小振幅为200mm。下面是三组齿轮啮合的具体计算:
在间距为700~900mm时,以满足最大桩距900mm,且轨迹曲线为余弦曲线,取x为小车轨道中心线位移,y为小车偏离中心线位移,单位为mm,则有
对弧长进行积分得,
通过计算,当弧长为2002mm时,最大振幅是330mm,此时桩距为700mm。
在间距为900~1100mm时,以满足最大桩距1100mm,则有
对弧长进行积分得,
在间距为1100~1300mm时,以满足最大桩距1300mm,则有
对弧长进行积分得,
因为我们利用线切割特种加工齿轮,齿轮的模数可以是非标准模数,故针对以上三组数据,结合后轮的直径与一个周期轨迹的弧长,得到三组不同的传动比,计算得到
 ;
;
1.3转向机构设计
转向机构是小车的关键机构,是小车前进过程中实现周期性运动的重要保证。我们采用了空间曲柄连杆机构,实现了小车在行驶过程中,前轮左右周期性的转动。该机构结构简单,稳定性较高,连杆之间使用球铰连接,摩擦阻力较小,方向轮叉架与车身采用了推力球轴承和一对法兰轴承,减小转弯过程中的摩擦阻力,提高转轴的同轴度,保证了转向机构的稳定性和可靠性。
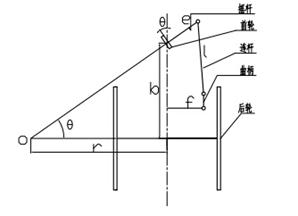
图6 转向机构示意图
下面是转向机构的杆长设计计算:
根据后轮轮距为150mm,则取曲柄与车中心线距离为 ,且与转向轮连接的摆杆长度也为
,且与转向轮连接的摆杆长度也为 ,同时转向轮间与后轴的距离为
,同时转向轮间与后轴的距离为 ,根据小车运动轨迹,计算小车的最大转角为桩距为700mm时的转角,通过计算在桩距为700mm时,轨迹公式为,
,根据小车运动轨迹,计算小车的最大转角为桩距为700mm时的转角,通过计算在桩距为700mm时,轨迹公式为,
根据质心处转弯半径与前轮转角的关系为, (
( 为前轮的转角)
为前轮的转角)
根据小车轨迹在计算小车的曲率半径为,
得 ,转角
,转角 。此时对应曲柄和连杆的最大合长度
。此时对应曲柄和连杆的最大合长度 。
。
通过计算得到最大合长度 ,且连杆长度
,且连杆长度 与曲柄长度
与曲柄长度 分别达到各自的最大值,且根据长度关系
分别达到各自的最大值,且根据长度关系
 ,得
,得 。
。
同理计算小车在桩距为1300mm时的最小转角。
通过轨迹和曲率半径公式,得 ,转角
,转角 。此时对应曲柄和连杆的最小合长度
。此时对应曲柄和连杆的最小合长度 。
。
通过计算达到最小合长度为 ,且曲柄和连杆分别达到各自的最小值,根据长度关系
,且曲柄和连杆分别达到各自的最小值,根据长度关系
 ,得
,得 。
。
综上,连杆长度 ,曲柄长度
,曲柄长度 ,单位为:mm。为本文加工零件提供了参数,同时也为调试时,提供了连杆长度和曲柄长度的范围。方便了后期的调试。
,单位为:mm。为本文加工零件提供了参数,同时也为调试时,提供了连杆长度和曲柄长度的范围。方便了后期的调试。
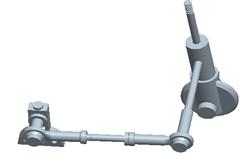
图7 转向机构三维示意图
1.4微调机构设计
微调机构是小车柔性的体现,调整它能使小车能够适应不同的障碍物间距。无碳小车的微调主要体现在对曲柄长度和连杆长度的微调。曲柄的长度控制的是小车行驶的周期即桩距,曲柄长度越长,周期越短,即适应障碍物的间距越短。连杆的长度控制的是方向轮左右转角多少有关。根据轨迹对称性,所以要调整连杆的长度,使左右转角尽可能相等,否则轨迹就会偏离赛道,这决定了小车绕桩的情况。所以曲柄长度和连杆长度的调整恰当与否是比赛时的关键。因为轨迹线对两者长度非常敏感的,所以要精确的调试两者的长度。本文使用的是类似丝杠的机构,用带螺纹的的连杆和曲柄,并用螺母锁死。调整时拧松螺母,旋转螺栓,改变长度,这样可以比较精确的调整曲柄和连杆的长度,提高了小车的可靠性。
1.5车身
车身是一切机构得以实现的载体,其主要承受的是重物的压力和地面对车轮的反作用力。为了满足强度,本文采用3mm铝合金板,对不承受力且不影响强度的地方,采取镂空处理。
2结论
本次设计的小车的创新之处在于能适应不同的间距,采用不同传动比的齿轮啮合,减小了行驶过程中的运动幅度,从而使小车行驶的距离更远。并且通过类似丝杠的微调机构,通过拧螺丝的方式调整曲柄和连杆长度,从而更加方便、精确地调整小车的行进间距。本文加工出了较高精度的零件,装配后进行了调试。实际应用结果表明,设计加工出的小车具有较高的稳定性与可靠性,满足比赛要求。
参考文献:
[1]王斌.”无碳小车”的创新性设计[J].山西大同大学学报,2012(2).
[2]杨明忠,朱家诚.机械设计[M].武汉理工大学出版社.2013.
[3]白雪,唐鹏达.机械传动无碳小车的设计构想[J].工业设计,2011(8).
[4]赵登峰,陈永强,邓茂云,机械原理[M],西南交通大学出版社,2012.
[5]杜志强.基于MATLAB语言的机构设计与分析[M].上海科学技术出版社,2011:118-120